
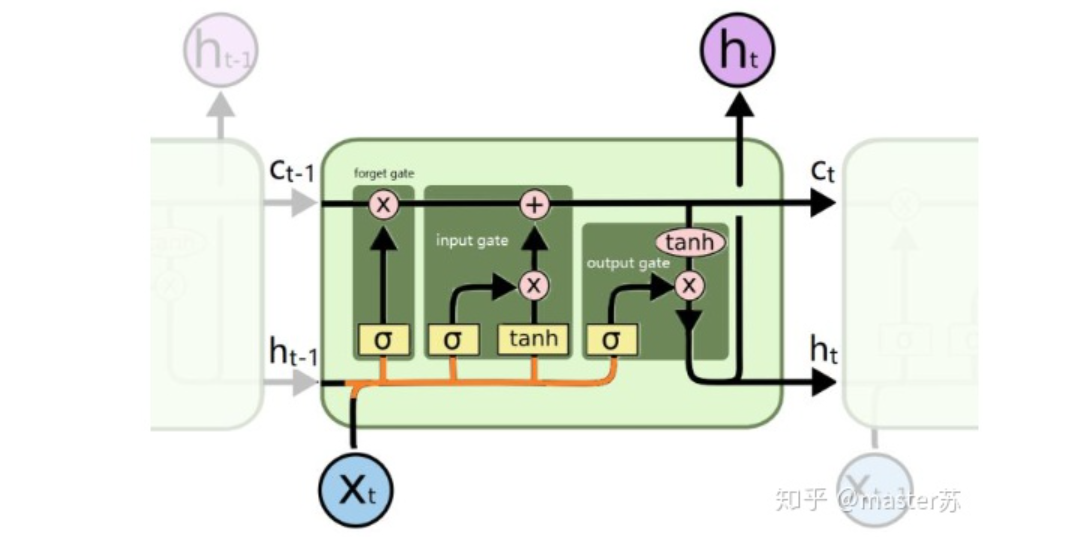
LSTM模型结构的可视化
点击上方“小白学视觉”,选择加"星标"或“置顶” 重磅干货,第一时间送达

来自 | 知乎 作者 | master苏
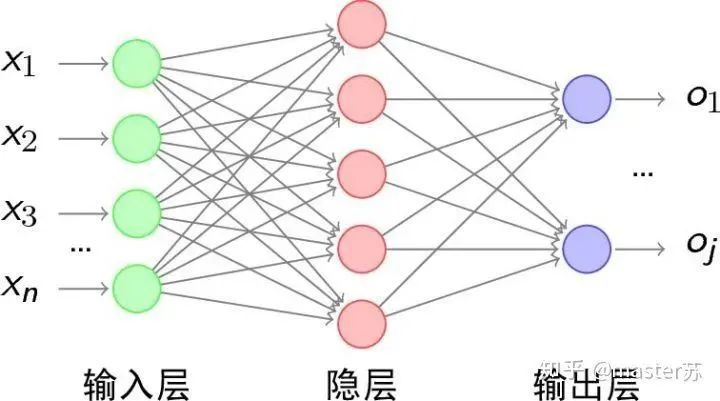
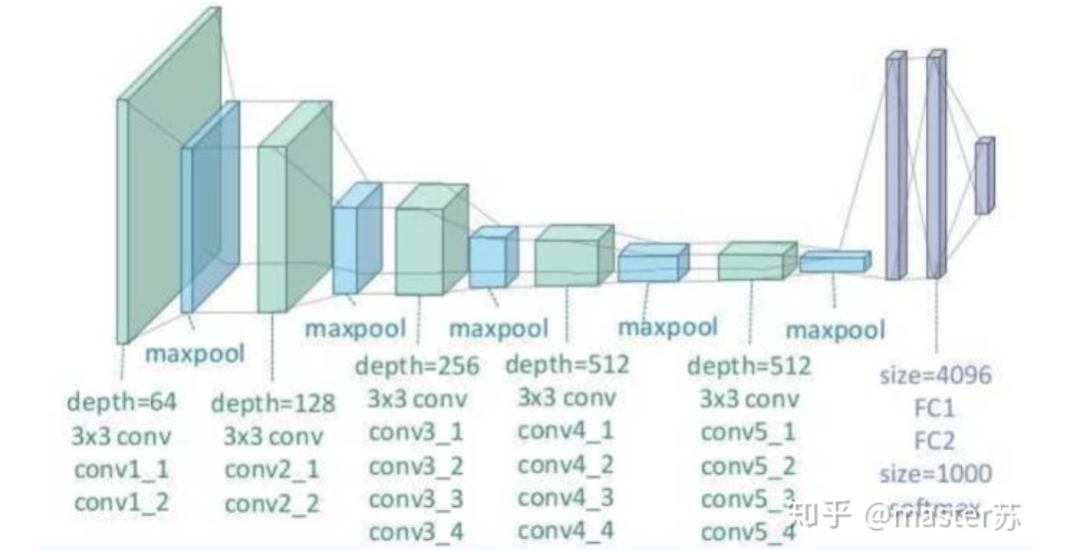
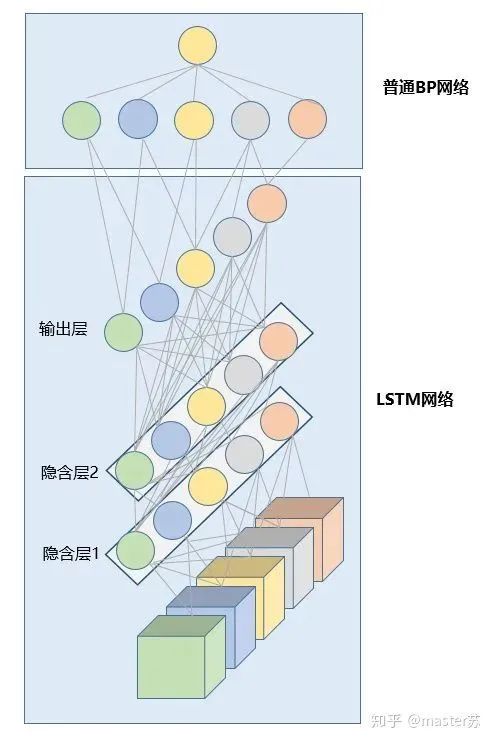
1、传统的BP网络和CNN网络
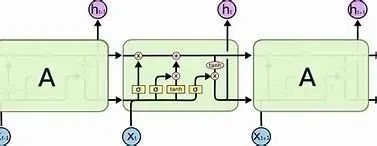
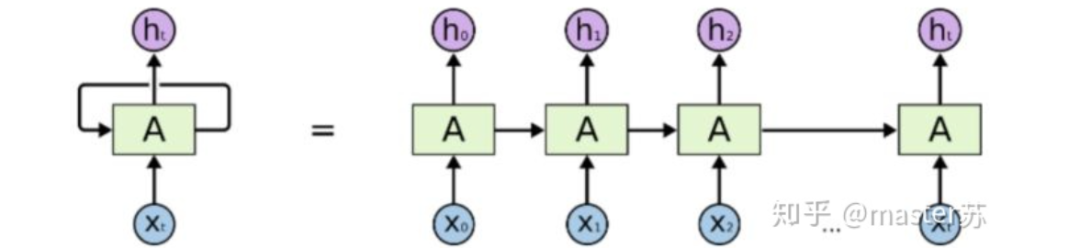
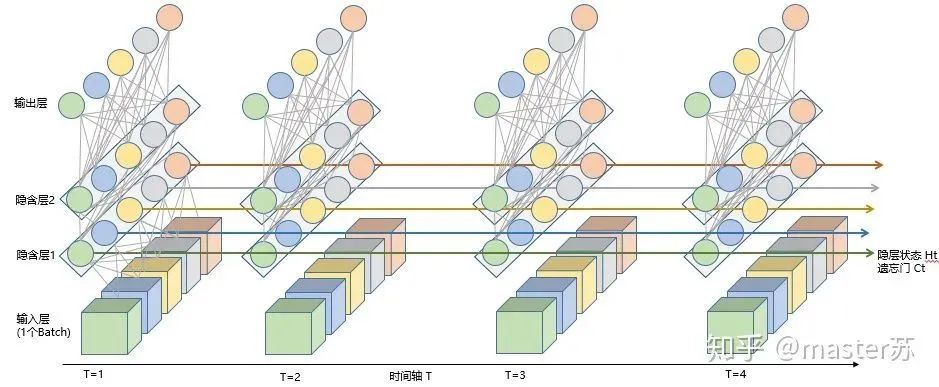
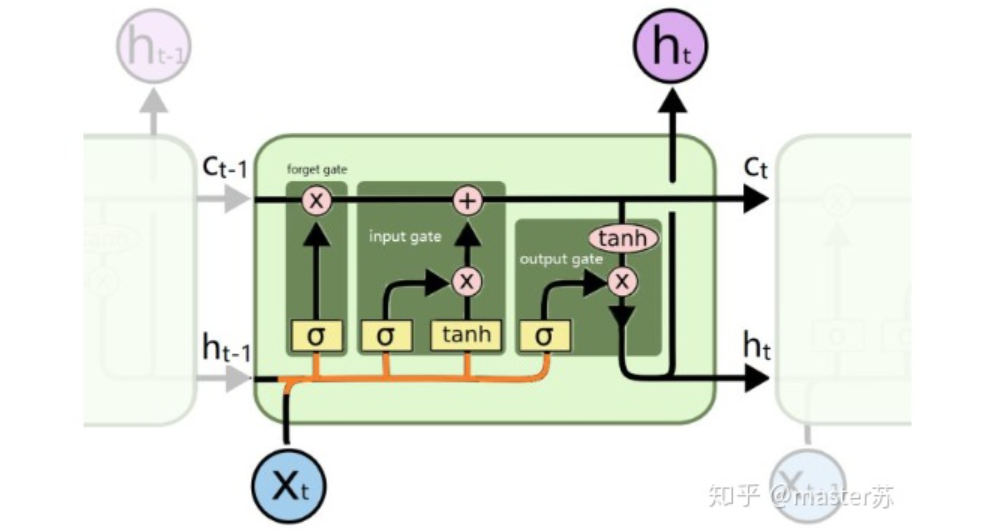
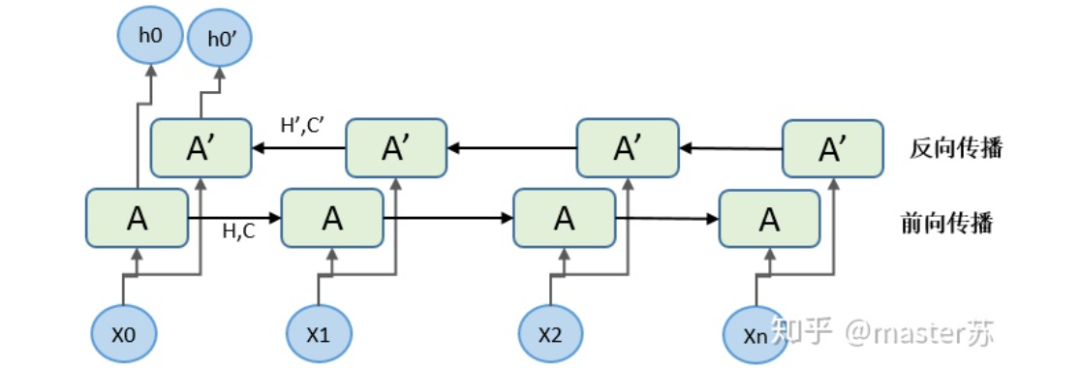
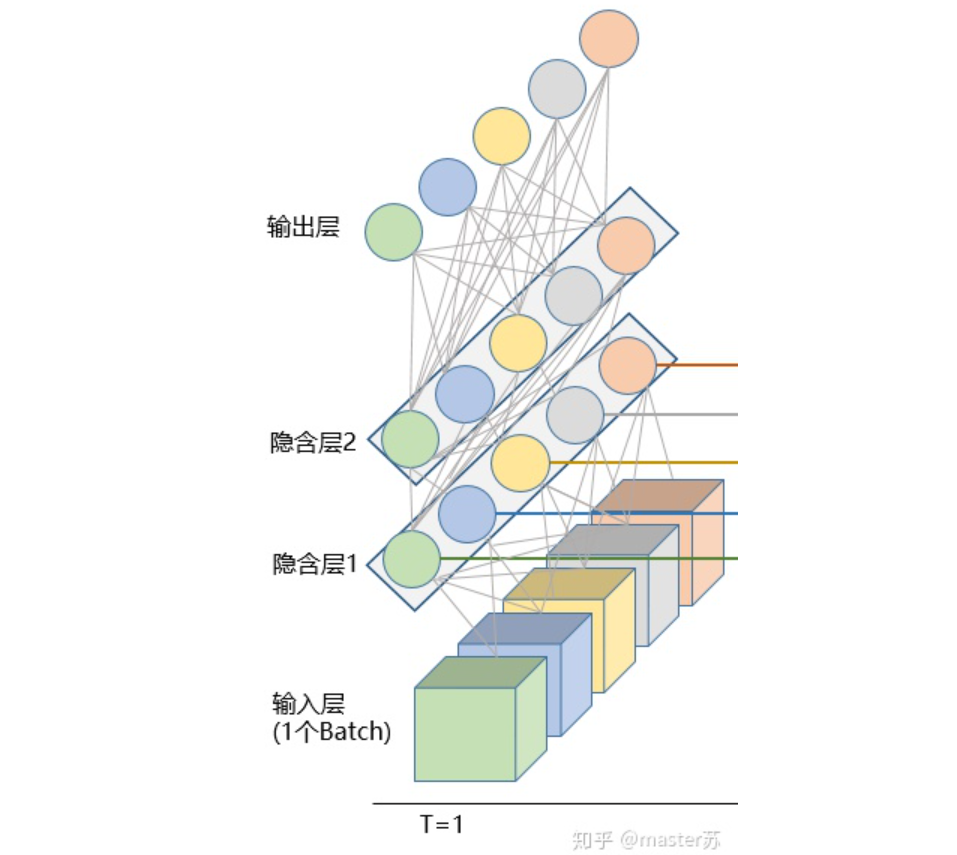
2、LSTM网络
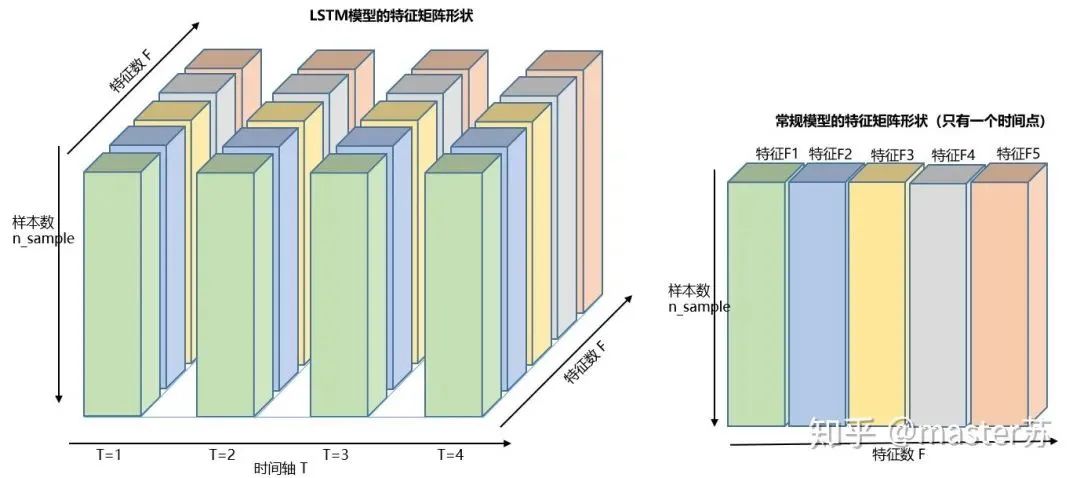
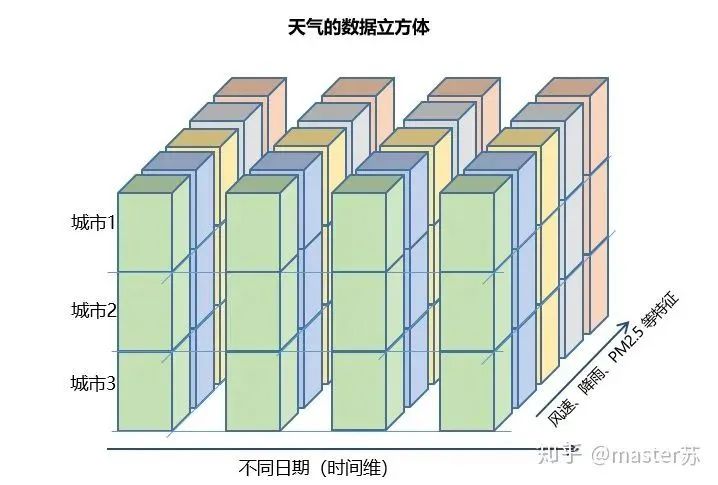
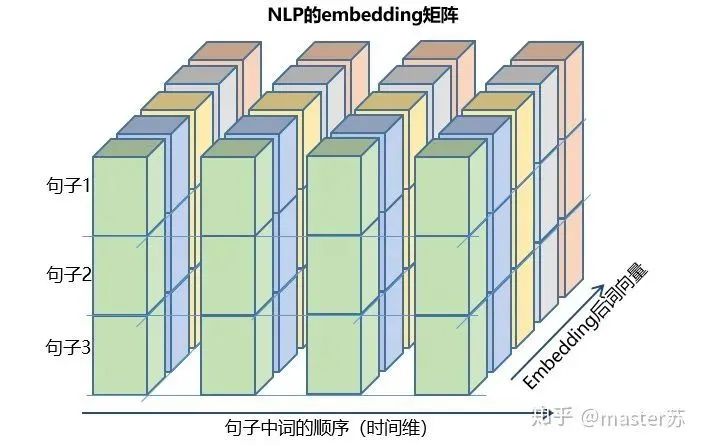
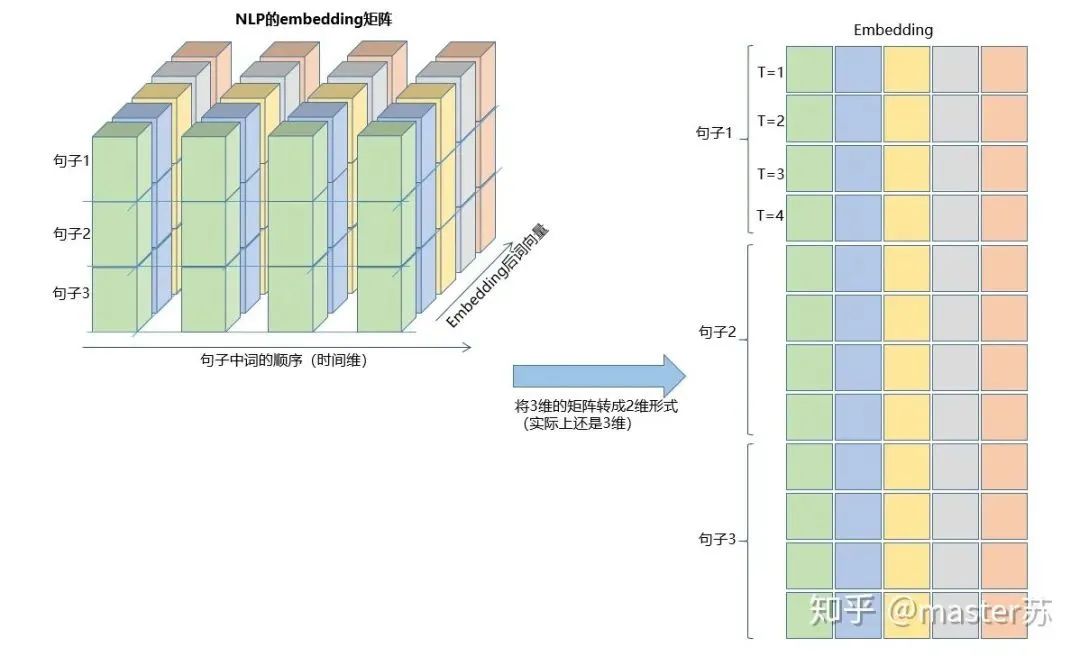
3、LSTM的输入结构
4、pytorch中的LSTM
4.1 pytorch中定义的LSTM模型
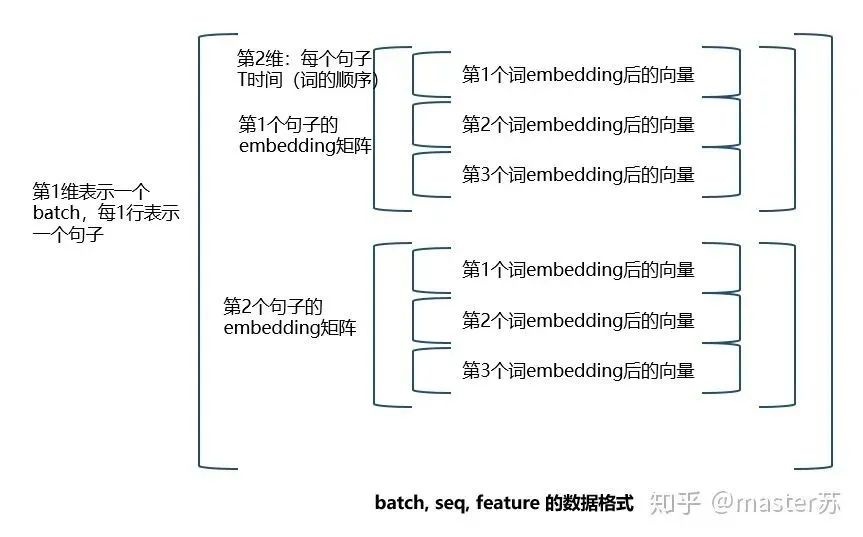
4.2 喂给LSTM的数据格式
4.3 LSTM的output格式
5、LSTM和其他网络组合
model = Sequential()model.add(Conv2D(32, (3, 3), activation='relu'))model.add(MaxPooling2D(pool_size=(2, 2)))model.add(Dropout(0.25))model.add(Conv2D(32, (3, 3), activation='relu'))model.add(MaxPooling2D(pool_size=(2, 2)))model.add(Dropout(0.25))....model.add(Flatten())model.add(Dense(256, activation='relu')) 添加普通的全连接层model.add(Dropout(0.5))model.add(Dense(10, activation='softmax'))....
4.1 pytorch中定义的LSTM模型
class torch.nn.LSTM(*args, **kwargs)参数有:input_size:x的特征维度hidden_size:隐藏层的特征维度num_layers:lstm隐层的层数,默认为1bias:False则bihbih=0和bhhbhh=0. 默认为Truebatch_first:True则输入输出的数据格式为 (batch, seq, feature)dropout:除最后一层,每一层的输出都进行dropout,默认为: 0bidirectional:True则为双向lstm默认为False
4.2 喂给LSTM的数据格式
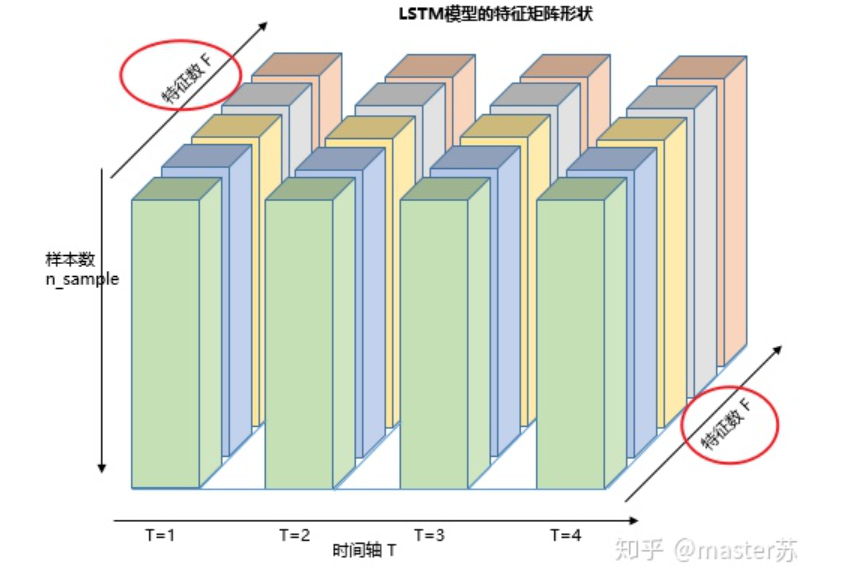
input(seq_len, batch, input_size)参数有:seq_len:序列长度,在NLP中就是句子长度,一般都会用pad_sequence补齐长度batch:每次喂给网络的数据条数,在NLP中就是一次喂给网络多少个句子input_size:特征维度,和前面定义网络结构的input_size一致。
input(batch, seq_len, input_size)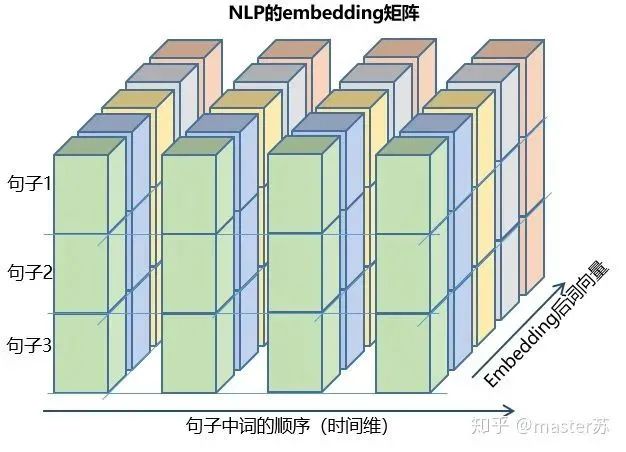
h0(num_layers * num_directions, batch, hidden_size)c0(num_layers * num_directions, batch, hidden_size)参数:num_layers:隐藏层数num_directions:如果是单向循环网络,则num_directions=1,双向则num_directions=2batch:输入数据的batchhidden_size:隐藏层神经元个数
input(batch, seq_len, input_size)
h0(batc,num_layers * num_directions, h, hidden_size)c0(batc,num_layers * num_directions, h, hidden_size)
4.3 LSTM的output格式
ct) = net(input)output: 最后一个状态的隐藏层的神经元输出ht:最后一个状态的隐含层的状态值ct:最后一个状态的隐含层的遗忘门值
output(seq_len, batch, hidden_size * num_directions)ht(num_layers * num_directions, batch, hidden_size)ct(num_layers * num_directions, batch, hidden_size)
input(batch, seq_len, input_size)
ht(batc,num_layers * num_directions, h, hidden_size)ct(batc,num_layers * num_directions, h, hidden_size)
import torchfrom torch import nnclass RegLSTM(nn.Module):def __init__(self):super(RegLSTM, self).__init__()# 定义LSTMself.rnn = nn.LSTM(input_size, hidden_size, hidden_num_layers)# 定义回归层网络,输入的特征维度等于LSTM的输出,输出维度为1self.reg = nn.Sequential(nn.Linear(hidden_size, 1))def forward(self, x):x, (ht,ct) = self.rnn(x)seq_len, batch_size, hidden_size= x.shapex = y.view(-1, hidden_size)x = self.reg(x)x = x.view(seq_len, batch_size, -1)return x
小白团队出品:零基础精通语义分割↓↓↓
下载1:OpenCV-Contrib扩展模块中文版教程 在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。 下载2:Python视觉实战项目52讲 在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。 下载3:OpenCV实战项目20讲 在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。 交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
评论