
万字长文:ADAS工程师视角看自动驾驶意义与前景/年终总结
(第414期)

文丨高工
汽车主机厂ADAS研发人员
以下是自2019年正式入行5年来,结合近期在与行业资深人士的交流,对自动驾驶行业的思考与总结。同时今天也是2024年除夕之夜,权且当作年终总结了。
下面,直接进入正题:
1.自动驾驶技术行业特点:
首先要说的是,智能驾驶是一个创新厌恶型领域。
这个观点最初是从一个Tier1智驾负责人那里听到的,细品下来觉得很有道理。在其他领域,创新都被看作是提高本领域性能、表现力的有利途径。但在汽车智能驾驶领域,往往并不是这样。所以在技术未能取得大的突破之前想让消费者接收是一件相当难的事情。
换一句话说,你觉得为啥老司机对智能驾驶都很嫌弃?
首先,由于智能驾驶技术是一项新技术,人类对机器的可靠性存在天然的恐惧感、排斥感。
毕竟驾驶汽车是一件关乎生命的行为。在驾驶前,他们担心自己不了解它;当他们正在进行驾驶时,智能驾驶系统将会自动调节和控制车辆,使车辆能够根据不同道路状况实现自动调节和控制可能无法理解车辆的动态,但车辆在某些场景下的反应可能会跟驾驶员的日常操作思路跟习惯不一致,特别是没有经过正规考试出来的老司机,驾龄越老,习惯越深,这种排斥感越大。(解决措施之一:特斯拉-影子模式)
其次,现在阶段的智能驾驶系统,仍然存在许多技术问题。
例如,有时车辆无法正常响应,有时中途故障提醒,甚至系统直接罢工,甚至出现不可预料的状况,比如AEB紧急刹车误制动——看似好好的,突然给你来一下紧急制动,你说你慌不慌。而且这种现象在前几年AEB系统不成熟之前经常发生,用户的抱怨也是很多。这几年通过技术迭代,已经将AEB误触发率大大降低。
小结一句,对于人类安全关切度高的领域,人类目前拒绝将主动权撒手交给AI机器。
2.L1-L5级自动驾驶的发展及制约:
L1:即1R。AEB紧急制动系统,通过一个前向毫米波雷达即可实现。单颗前向毫米波雷达系统也是我入行时最先接触的车型开发项目。因为只涉及车辆车辆纵向的控制,开发过程相对而言最简单。
L2:通常为1R1V(1V)或者3R1V。1R1V即一个前向智慧摄像头加一个前向毫米波雷达。因为摄像头的加入,可以识别车道线,故在纵向控制的基础上又增加了横向控制,即可以辅助驾驶员变更车道,含车道偏于预警、自动纠偏功能。横向控制的增加大大丰富了智驾的功能清单。

LDW车道偏离预警功能:可以提醒你车辆跑偏车道。
LDP车道保持功能:可以帮你维持在当前车道中间,稳稳当当的行驶。
ELK紧急车道保持功能:可以在一些紧急时刻强行把车辆纠偏防止与临道车辆刮碰。
其中,LDP跟ELK在自行纠偏时方向盘会自动摆动,去过摆动幅度触发的时机、摆动幅度与频率过于跟驾驶员习惯不符合,很容易让驾驶员感觉在“抢夺”方向盘,因而产生恐慌,所以这俩功能做的不好很容易遭受用户抱怨。
这里补充一下,随着技术的发展,2020年还活跃的1R1V配置目前基本已经被1V配置取代。
原因有二。
其一是因为单个摄像头的技术能力已经无限趋近原有1R1V的能力,且部分供应商的1V产品性能已经超越1V的。具体这里的供应商是谁,就不提了,抬头不见低头见的,哈哈。
其二,主机厂的降本压力。一个雷达小几百块,降个本它不像吗?如果你说,毫米波雷达可以解决摄像头在极端天气下,如大雨、大雾、大雪时捕捉目标不准的场景,你不用它出了事儿怎么办?
主机厂:你说的这都是特殊场景,这些场景下谁会用智驾功能呀!我们说明书里都已经写得清清楚楚。
说是这么说,可实际,有些年轻人也是胆大,什么路况下都敢开启智驾功能······因此发生了很多不该出现的事故。再次提醒一句:现阶段的智能驾驶功能都是“辅助”性质,扶好方向盘,时刻保安全!
3R1V配置则是在1R1V的基础上增加两个毫米波雷达,通常是后向毫米波雷达,位于车尾两侧。因为前面已有1R1V,所以若想将智驾功能覆盖面更广,车辆后向增加传感器的必要性更大。这俩后向毫米波雷达俗称RDA角雷达,实现后向来车相关的预警功能与车辆控制。
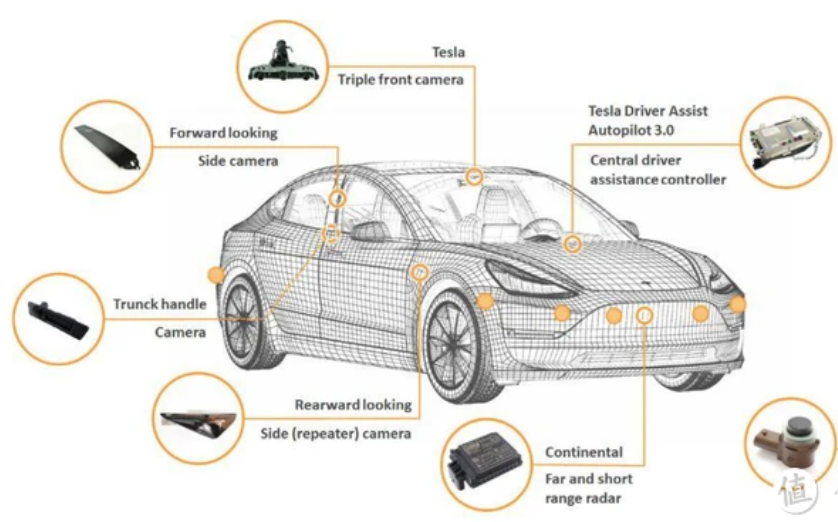
L2+:按照智驾系统的时间轴来看,5R1V配置开始出现,即5个毫米波雷达,1个前向毫米波加车辆每个角上各1个,共计5个。1V就是上面提到的1个前向智慧摄像头。也正是从这个传感器配置开始,部分传感器已经不再需要单独的控制器模块,而是自身只作为一个传感器,控制器由一个大的、单独的硬件来充当,即“域控制器”。但各家主机厂的方案并不相同,如有的方案是这样:5R1V方案。按照功能来分,前向的3个毫米波雷达跟摄像头的控制器由一个域控制器来承载,后向的2个毫米波雷达因为由独立的后向功能则保持自身的控制器。这样一来,大大提高了控制器的集成化水平。
L 2++:周 视引入,激光雷达可用,行泊车一体。
因为周视摄像头的引入,一个比较流行的方案为3R6V。如果说5R1V方案是以雷达为主(雷达作为主要的感知来源),那么3R6V方案即是以摄像头为主传感器。目前小鹏、理想,跟特斯拉都是以视觉为主,其中特斯拉更是把视觉做到了极致,现在整车已经可以放弃所有雷达,只用摄像头来做自动驾驶,而国内的主机厂仍在走视觉、雷达融合方案。可是相比之下,我们国内的多传感器融合方案的效果却依旧不如特斯拉的纯视觉方案,特斯拉还是牛,不得不给其点个赞。由此也可见,传感器只是基础,算法的优劣则更加关键。最近特斯拉端到端的技术,再一次引领了自动驾驶行业的发展方向。
另外,有些方案中增加了激光雷达的使用。但因其成本过高,往往搭载激光雷达的车型售价都在30万以上。搭载激光雷达的方案多种多样,行业内比较认可的方案是——若想实现城市NGP则需要2个及以上的激光雷达,前向左右各一个,可以解决前方鬼探头场景。
L3:驾驶员需要在驾驶位,驾驶员可脱手脱眼,但需支持车辆报警10S钟接管,即功能不能直接退出,而是要给驾驶员留出接管反应的时间,即冗余能力要强。但因为法规政策规定L3级别的自动驾驶车辆若在行驶中出现事故是由主机厂承担责任,与主机厂目前并不想也没那个实力来承担这个责任相矛盾,故市场上基本没有真正意义上的L3自动驾驶量产车。有也是极小数量的车辆,宣传效果远大于实用价值,说白了就不是真正想卖给消费者的。
L4:是由无人驾驶系统完成所有的驾驶操作,根据系统要求,人类不一定提供所有的应答。车内可无需配备安全驾驶员。当车辆具备L4级自动驾驶功能,全程已无需人类驾驶者介入驾驶,无人驾驶系统可独立完成所有驾驶操作、周围监控以及支援工作,即实现真正的无人驾驶。但该级别仍然限定道路和环境条件,如用于于无人物流、无人微公交、自主泊车等特定场景。
L5: 全自动驾驶。与L4相比,是由无人驾驶系统完成所有的驾驶操作,车内无需配备安全驾驶员,且不限定道路和环境条件,即无人驾驶系统可在任何条件下驾驶车辆。直到这个等级才算是真正意义上的完全自动驾驶。
3.技术原理及发展:
(1)自动驾驶难点:我怎么知道自己感知失效了呢?
关于传感器局限性:
雷达:目标物大小判断不了,车道线,静态目标识别不了;
摄像头:雨雾雪状态下不太行。
可信AI:如Chatgpt这种AI模型,人类是从理工科学上难以理解的,无法解释,无法控制。美国日本中国对这种新东西感兴趣,但欧洲人不太信这种意识流。
目前2种传统融合方式:
目前,行业内采用的多传感器融合算法主要分为前融合和后融合。前融合是指系统会将传感器感知数据进行整合,输出一个感知结果,再进行决策。这种算法对不同类型源数据的时效性要求高,对硬件算力有更强要求。后融合是指所有传感器均输出感知结果,供系统决策。该算法的弊端是单一类型的传感器因自身能力限制,受位置、光线以及速度等因素影响,可能发生漏检或误检。
简单来说是这样:
前融合:雷达,相机输出原始数据,由归控自己判断是否为目标。
后融合: 多个传感器都用自己的原理判断是否为目标,传递给归控,叠加处理,一旦不同的传感器输入的目标结果不一致问题就来了。可以通过置信度判断谁的对,信谁的。
后面又出现了感知技术的不断发展,比如上汽旗下飞凡汽车提倡的前后一体化融合、BEV鸟瞰感知、特斯拉的端到端感知融合技术。

1.前后一体化融合:包含前融合、后融合,是将前融合和后融合两个过程同步进行,对视觉、毫米波、激光雷达等独立输出的感知结果进行后融合,同时综合激光/毫米波+图像的前融合结果进行全要素全观测周期融合。还会将通过全融合算法获取的信息与高精度地图进行再次综合,进一步精准测量、判断车辆周围环境的动态以及静止物体,最终得到的感知结果会实时呈现在车机大屏上。
2.BEV(Bird's-Eye-View鸟瞰俯视视角),之前的是正视图视角,为2D的,缺少前方物体深度信息,这就造成了纵向深度上感知存在局限性。而BEV则是一种鸟瞰视角,可以理解成“俯视”。BEV是感知算法层面,目前最好的感知算法,目前跟ChatGPT唯一的接口。所以在ChatGPT爆火的今天,逐渐成为各大主机厂、供应商争相研究的感知技术。
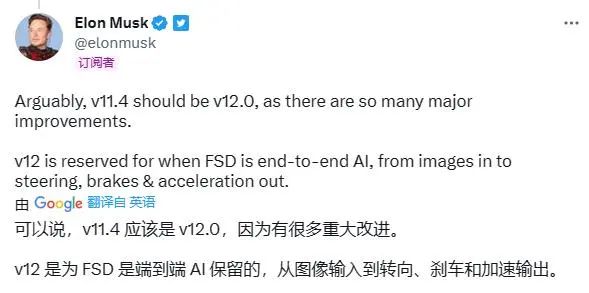
3.特斯拉的端到端技术。据科技狂人马斯克前段时间声称,特斯拉Model3换代车型上会应用此项新技术,目前已很成熟。
目前已量产的智能驾驶,绝大多数采用的是模块化架构。所谓“模块化”其实很好理解,就是把智能驾驶拆分成一个个典型任务,然后将这些任务交由专门的AI模型或模块来处理,比如说现有的智驾体系可以分为感知、预测、规划三大模块,每个模块都有自己对应的模型,每个大的模块下,又可能是以多种模型组合而来的,所有可以做到处处有跟踪。这套技术的优势就是当出现问题时,可以通过每个小模型层层分析,排除并解决问题,换句话说——这套系统里的东西都是“环环相扣”的,调试的原理十分清晰。但相应的弊端也显而易见,那就是每个环节的环环相扣也会导致你改动一个地方,往往它的上下游都需要修改,甚至上上游、下下游也要改。而且在实际开发当中,我们从业者越来越多的发现了很多“Corner Case"也就是一些临界场景容易功能失效。从本质上来讲,造成这个现象的原因是目前的技术是人为定义的,而实际路况千奇百怪,总有些我们在设计时考虑不到的点,又或是现有技术没法与现行方案相匹配,最终造成现有的方案就是会解决不了一些特殊路况跟场景。
此时,端到端技术的优势显现出来。它则是通过一个模型实现了以上多种模型的功能,研发人员只需要针对这一个模型进行整体训练、调整优化,即可实现性能上的提升,因此可以更好地集中资源,实现功能聚焦。现有技术不是分为感知、预测、规划三大模块嘛,端到端不需要分那么细,感知、预测、规划它全部都能干,只需要拿到外界路况的输入信息,它就可以直接输出信息给到车辆执行器、车机大屏。
也就是说端到端技术的一端是输入,一段是执行。而且它还是个“黑盒”,也就是说端到端这个大模型中的运行机理你是没法一条条拿出来单独分析的。比如,针对某一场景它给出了一个执行结果,车辆运行正常,也符合人类预期。但是,它内部是怎么运行的,怎么结合路况给出最终意见的,它不告诉你!
那怎么样去开发这个端到端技术呢?靠训练,用大量的道路采集信息去训练这个大模型!
看到这,您应该知道这个端到端技术的恐怖之处了,它其实就是个AI大模型,需要大量的数据去训练。说白了,跟人脑工作原理有点像,咱们人类不也是从婴儿开始不停的接受大人的教育,慢慢变得“聪明”起来嘛。只是,人类目前为止并不放心把关乎人类生命安全的事情交给一台不可控的机器。万一,这台机器不知为何突然发疯,在正常道路上突然狂飙200KPH怎么办?毕竟人类都有可能突然发疯!
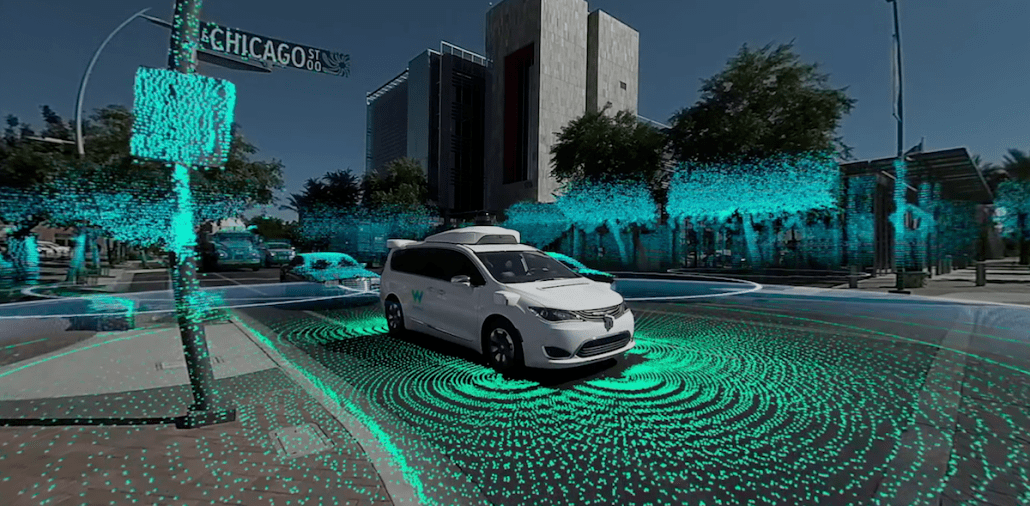
(2)激光雷达
激光雷达:城市NGP需要2个及以上——前向、左右各一个,针对前方类似鬼探头,可以很好的解决。但由于价格仍然居高不下,故量产车型上激光雷达方案更多的是作为补强传感器,1-2个激光雷达的方案有很多。
(3)4D毫米波雷达
见链接。在普通毫米波雷达的基础上,增加一个维度(高度)的感知能力。普通的毫米波雷达为3D雷达,可感知维度分别为目标车距离、目标车车速、目标车横向角度。而4D毫米波则增加了一个俯仰角,即目标的高度,因此可以构建类似于激光雷达点云。但是一个毫米波雷达几百块,而一个激光雷达几千块,差了一个数量级。所以4D毫米波可以简单的理解为激光雷达的”平替“。
(4)ASIL D
ASIL D相当于500万册图书馆里的错别字只有36个以下。航天标准之下最大的,很严格。
(5)高度集成策略:为何功能越复杂的功能越需要域控?
1.从OTA角度-离散的ECU升级失败的概率太大了,统一策略,一次就把原来离散的ECU升级全部搞定,省事也省心。这里说一下,FOTA升级时强烈依赖于上网通道,一般为TBOX提供此项链路,一旦网络通信出现问题,数据流很可能中断,造成FOTA失败。在我日常工作中接触到的结果来看,FOTA的失败概率还是很大的。而且说个小秘密——车企通常在很多FOTA失败时不对用户提示失败,而是让你重新试试,尽可能减少因刷新失败带来的用户信赖度损失。
2.成本:降本。举个例子,原来四个零部件,则需要四个硬件,这四个硬件不仅有硬件成本——接口、线束、DV/PV测试费用、供应商费用一个也不能少,我把它合成到一个控制器你说是不是可以省很多成本!
3.性能:性能提升。从控制逻辑上来看,由原来分散的逻辑,变成统一的策略,无疑可以形成更规范、合理化的控制逻辑,减少或避免因各家供应商、控制器策略不同带来的影响;在资源利用上,可以统筹整个控制器,按需分配芯片算力、内存等,可以更好地利用资源;降低原本分散型控制器之间的信号延迟、信息损耗等。
最后,如果整车只用一个域控制器——整车中央域:至少2000T算力。整个汽车控制器发展趋势:分布式——域集中式——中央集中式。
(6)低成本策略:用一个J3芯片实现分时行泊功能-分时复用
在一两年之前,也就是20年、21年的样子,自动驾驶正值上升期,各种独角兽企业层出不穷,国内自动驾驶芯片企业如黑芝麻、地平线纷纷获得融资,可以说是一派欣欣向荣之景。但是自从22年开始,自动驾驶的企业的投资回报率迟迟达不到投资人的预期,导致资本渐渐都自动驾驶失去耐心。与此同时,中国电动汽车市场异军突起,不仅销量屡创新高,而且价格也越打越低,直接让自动驾驶配置在整车BOM成本上处于尴尬位置——自动驾驶不是大部分用户买车的首要考虑因素,单成本却很高。以3R6V/HDM&RTK/4V12U的行泊一体方案为例,已经大几千元。如果带上激光雷达,轻轻松松过万。
现在带NGP功能的很多车型都在十几万元,按照15万元的车型,8千元的成本来算,自动驾驶的BOM成本就达到了5%。说句大白话来说,用整车5%的成本却带不来对应的卖车作用,最终导致很多车型弃用行泊一体配置,只用1V或1R1V的配置。这也就导致原本使用一个J3的芯片实现行泊功能分时复用的方案从最初的嫌弃,又在23年变成了香饽饽!可以说,低成本的自动驾驶方案在23年重新火了起来。
(7)数据闭环(车云一体)
数据闭环主要分为两大部分:1.DOTA数据更新,2.埋点数据的回传。其中DOTA即高精地图数据的OTA更新。而埋点数据则是将智驾功能相关的信号上传到云端,方便车企工程师从云端直接获取车辆的数据。想象一下,公司的一辆车型出现了售后故障,而事发地点远在千里之外,那为了解决问题是不是要出个差?而有了这个数据闭环功能,车企工程师就可以针对故障车从云端数据库调取数据,分析问题,岂不是非常高效!
(8)低功耗策略
针对电动车型,其续航能力被视为重要指标,这就需要各整车各个控制器研究降低其零部件功耗的可行性。随着23年以来电动车的销量爆发式增长,这个需求便更加迫切。这两年电动车有个重要的指标已经被提出:一度电可行驶公里数。目前有的车型可以做到一度电行驶9KM左右,比如比亚迪海豚、上汽荣威D7。
而智驾控制器的功耗相对也不低,比如行泊一体的MPD域控制器的功耗一般都在几十瓦的样子,故在降功耗的目标范围之内。目前的低功耗方案主要集中在保持其控制器通信,而关闭其智驾功能模块这一思路上,功耗降幅明显。
(9)特斯拉-影子模式
每一台特斯拉都隐藏着一个鲜为人知的模式也就是影子模式 shadow mode。当我们在自己开车并没有开启autopilot或者是FSD辅助驾驶的时候,特斯拉的自动驾驶程序依然在后台悄悄的运行。但是他不会干预驾驶员的操作,你可以把它理解成为坐在副驾驶位不断学习驾驶技术的人工智能。
那么特斯拉为什么要浪费这些算力和功耗通过影子模式去模拟各种驾驶行为呢?其实很简单!就是为了学习出更安全的驾驶方式超越人类的驾驶技术、驾驶员开车做出变道行为的时候,特斯拉也会根据实施的路况通过算法操作模拟出的影子去做出变道行为,并且将自己的变道行为和人类的变道行为去做出对比。

在 影子模式一次次的演练中积累大量珍贵的数据再将海量的数据投喂给神经网络人工智能。 从而训练人工智能的驾驶技术达到人类的水平甚至会超越人类更安全更高效。 所以特斯拉的shadow的model其实是一个非常高效的驾驶数据采集模式。 伴随着汽车的销量越高它能采集到的场景就越多,数据量也越大就像滚雪球一样,人工智能自动驾驶的技术进化的会越来越快。
(10)重感知轻地图:成本+鲜度(高速+城市)+城市道路合规性
地图是一个锦上添花的东西,在城市NGP功能时还算好用,但是一旦拓展到城市NGP时,地图就跟不上节奏了。主要是高精地图的数据采集耗时耗力、更新数据的周期不够快,而NGP又是需要快速迭代路况的东西,所以智驾功能一旦进阶到城市NGP时地图的地位就非常尴尬。还不是重感知来的实在。
4.芯片及大模型
(1)常见芯片:地平线:J5:96T,J6:1000T 索尔2000T(舱驾一体) orin 250T
关于TOPS:Tera Operations Per Second的缩写,1TOPS代表处理器每秒钟可进行一万亿次(10^12)操作。算力越大,代表处理器运算的能力越强。但是这里需要指出,并不是芯片算力越大,性能就一定好。因为多少TOPS的算力只能代表硬件本身的计算能力,而实际的性能表现除了硬件能力外还需要看配套的算法水平,如果硬件能力强大,但配套的算法是一堆垃圾代码,整体性能依旧不会好。只有硬件算力跟算法都好,且匹配软硬件匹配度也高,才能有一个好的性能。单独提硬件算力跟算法好坏都是片面的,不贴合实际的。

(2)芯片的选择:能实现的功能,对应多少算力,就选择多少算力的芯片
芯片与散热:雕刻机,单位面积上可以雕刻多少晶体管,尺寸越小,单位面积上雕刻的晶体管就越多,算力总和就越大。但是算力带来的散热性就越大,于是乎芯片的载体-PCB板的散热,引申到控制器硬件的散热能力就越大。对于算力要求最高的域控制器来说,45Tops以上算力的控制器,完全被动散热(自然辐射散热)则不再满足需求。需要加一个风扇,甚至通过外加循环液体带走控制器上的局部热量。目前控制器的散热形式分为三大类:完全被动散热、风扇散热、水冷散热。
其中完全被动散热的 域控制器在40W左右,风扇散热的域控制器极限在60W以内,水冷散热则是目前散热方式的天花板,预计真的到了整车中央集中式控制器时才会遇到挑战。
(3)大数据被大模型所取代
写代码:由程序员写到仿真软件、大模型自动生成。专门写代码的人员会越来越少。补充一下,人工智能(AI)也有分支,其中一种时“线性”的,可以理解成每一个动作都可以找到出处、传递路径,有理有据。另一种是端到端的(E2E),即给你一个输入,直接给你输出结果,过程不告诉你。可以通过喂数据不停的去优化它,提高准确性,但缺点也很明显——内部是怎么运算的你是完全不知道的。这就有点像人脑。
但是! 但是! 但是!
人脑如此可以,人类却对这种不可控的技术十分敬畏,甚至是惊恐。看看科幻片里的智能机器人“造反”的场景就能感受人类对于AI机器人失控有多绝望!这也就回到了开头所说的,人类目前拒绝将主动权撒手交给并不十分可控的AI机器。
5.自动驾驶行业趋势预测。
大嘴一下,斗胆预测下接下来自动驾驶行业的走势。
18年我刚毕业时,自动驾驶就已经很火,一直到21年,可以说是前景十分美好。20、21年的时候,只是我认识的一些人就有很多汽车相关领域的人涌入。那时我就说这不是一个好事,因为步子大了容易扯着蛋。自动驾驶初创企业为了画饼,给投资人描绘了一幅十分美好的画面。但是初创企业的领导者们还是低估了自动驾驶落地的困难度。
技术突破与国家政策缺一不可,事实证明,后者比较扯后腿。
到了22年,投资人们面对初创企业光砸钱不见收益估计也烦了,失去了兴趣,我们看到很多初创企业倒下了很多,不仅是初创的车企,倒下最多的还是初创的自动驾驶Tier1们。所以说22年自动驾驶便从一个高峰陡然下降,遇到了寒冬!现在已经24年了,这个寒冬也只是略微见到了回春。

那么,接下来呢?
接下来我认为自动驾驶还会重新繁荣起来。以国内为例,房地产不行了,A股那个半死不活的样子(最近A股的表现,你懂得!),中国的钞票又在增发,那你说钱将会流向哪里呢?
我觉得是高科技企业,如一些卡脖子的专业领域以及自动驾驶、新能源这类技术革命,产业迭代的领域,利于中国弯道超车。
除了基建和股市,房子、车子、手机是我们最常面对的消费品。
大规模基建跟房地产属于上个时代了,手机已经发展到一个瓶颈,还剩下什么——车子!
这也是为何很多有钱的互联网大佬要造车的原因——手里那么多钱不造个车赌一把?关于他们选择造车还有其他一些原因,这里不再展开。

下面的信息对于汽车人来说是个好消息:
最近关于L3自动驾驶的国家政策陆续出来了,国家也在帮我们自动驾驶出力。
2023年7月,工信部和国家标准化管理委员会联合发布了《国家车联网产业标准体系建设指南(https://auto.gasgoo.com/institute/journal/1001汽车)(2023版)》。根据该指南,到2025年,系统形成能够支撑组合驾驶辅助和自动驾驶通用功能的智能网联汽车标准体系。到2030年,全面形成能够支撑实现单车智能和网联赋能协同发展的智能网联汽车标准体系。
2023年11月,工信部、公安部、住房和城乡建设部、交通运输部四部委发布《关于开展智能网联汽车准入和上路通行试点工作的通知》,进一步为高阶智能驾驶的上路测试提供政策支持,扫清阻碍。
在政府层面,自动驾驶的绿灯肯定会时常开启。经济越不景气,越是提不起来,政策向自动驾驶倾斜的可能性就越大! 

最后,总结一句——接下来的汽车产业还会是一个巨大的突破口,而自动驾驶跟新能源则是两架马车。
关于这一点,我很笃定。


关注《无人驾驶俱乐部》,让你更懂汽车无人驾驶技术!
END
往期精彩推荐
-
车路协同: 物联网V2X技术—智能驾驶的又一次伟大变革!
后台回复关键字:
✔回复 “ V2X ” :查看V2X两大技术标准:DSRC与LTE V2X详细对比资料;
✔回复 “精美壁纸 ” :获取兰博基尼·汽车精美壁纸一套;
还有更多汽车无人驾驶领域资料、资源等,敬请期待!
欢迎加入《无人驾驶俱乐部》! 2024: 共同学习、共同进步、共同发展。 智能驾驶ADAS,V2X, 感知融合!