
收藏 | 机器学习、深度学习面试知识点汇总
本文总结了一些秋招面试中会遇到的问题和一些重要的知识点,适合面试前突击和巩固基础知识。
前言
最近这段时间正临秋招,这篇文章是老潘在那会找工作过程中整理的一些重要知识点,内容比较杂碎,部分采集于网络,简单整理下发出来,适合面试前突击,当然也适合巩固基础知识。另外推荐大家一本叫做《百面机器学习》的新书,2018年8月份出版的,其中包括了很多机器学习、深度学习面试过程中会遇到的问题,比较适合需要准备面试的机器学习、深度学习方面的算法工程师,当然也同样适合巩固基础~有时间一定要需要看的书籍:
程序员的数学系列,适合重温知识,回顾一些基础的线性代数、概率论。 深度学习花书,总结类书,有基础知识的讲解,比较全面。 统计学习方法,总结类书,篇幅不长,都是核心。 Pattern Recognition and Machine Learning,条理清晰,用贝叶斯的方式来讲解机器学习。 机器学习西瓜书,适合当教材,内容较广但是不深。

常见的常识题
L1正则可以使少数权值较大,多数权值为0,得到稀疏的权值;L2正则会使权值都趋近于0但非零,得到平滑的权值; 在AdaBoost算法中,被错分的样本的权重更新比例的公式相同; Boosting和Bagging都是组合多个分类器投票的方法,但Boosting是根据单个分类器的正确率决定其权重,Bagging是可简单地设置所有分类器权重相同; EM算法不能保证找到全局最优值; SVR中核函数宽度小欠拟合,宽度大容易过拟合 PCA和LDA都是经典的降维算法。PCA是无监督的,也就是训练样本不需要标签;LDA是有监督的,也就是训练样本需要标签。PCA是去除掉原始数据中冗余的维度,而LDA是寻找一个维度,使得原始数据在该维度上投影后不同类别的数据尽可能分离开来。
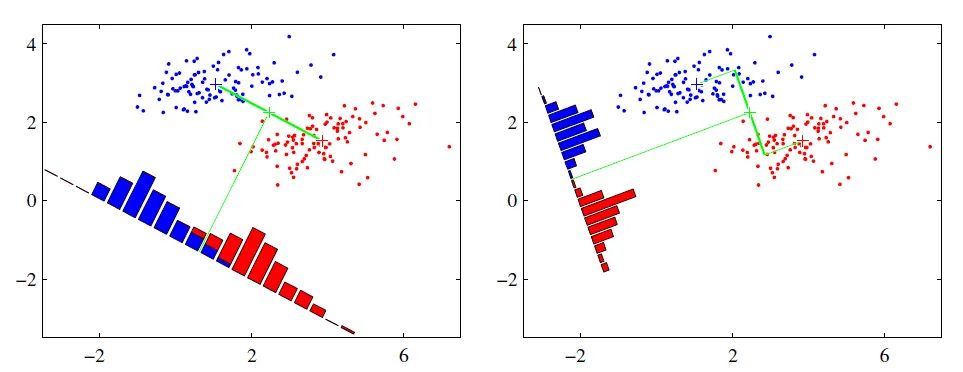
PCA是一种正交投影,它的思想是使得原始数据在投影子空间的各个维度的方差最大。假设我们要将N维的数据投影到M维的空间上(M<N),根据PCA,我们首先求出这N维数据的协方差矩阵,然后求出其前M个最大的特征值所对应的特征向量,那么这M个特征向量即为所求的投影空间的基。LDA投影后类内方差最小,类间方差最大。如下图所示有两种投影方式,左边的投影后红色数据和蓝色数据还有重叠部分,右边的投影后红色数据和蓝色数据则刚好被分开。LDA的投影即类似右边的投影方式,投影后使得不同类别的数据尽可能分开,而相同类别的数据则尽可能紧凑地分布。
参考链接:PCA和LDA的对比
KNN K近邻
关于K近邻算法的知识有很多,比如算法执行的步骤、应用领域以及注意事项,不过相信很多人对K近邻算法的使用注意事项不是很清楚。在这篇文章中我们针对这个问题进行解答,带大家来好好了解一下k近邻算法的注意事项以及K近邻算法的优点与缺点。
K近邻算法的注意事项
K近邻算法的使用注意事项具体就是使用距离作为度量时,要保证所有特征在数值上是一个数量级上,以免距离的计算被数量级大的特征所主导。在数据标准化这件事上,还要注意一点,训练数据集和测试数据集一定要使用同一标准的标准化。其中的原因总的来说就有两点内容,第一就是标准化其实可以视为算法的一部分,既然数据集都减去了一个数,然后除以一个数,这两个数对于所有的数据来说,就要一视同仁。第二就是训练数据集其实很少,在预测新样本的时候,新样本就更少得可怜,如果新样本就一个数据,它的均值就是它自己,标准差是0,这根本就不合理。
K近邻算法的优点是什么呢?
K近邻算法的优点具体体现在四方面。第一就就是k近邻算法是一种在线技术,新数据可以直接加入数据集而不必进行重新训练,第二就是k近邻算法理论简单,容易实现。第三就是准确性高,对异常值和噪声有较高的容忍度。第四就是k近邻算法天生就支持多分类,区别与感知机、逻辑回归、SVM。
K近邻算法的缺点是什么呢?
K近邻算法的缺点,基本的 k近邻算法每预测一个“点”的分类都会重新进行一次全局运算,对于样本容量大的数据集计算量比较大。而且K近邻算法容易导致维度灾难,在高维空间中计算距离的时候,就会变得非常远;样本不平衡时,预测偏差比较大,k值大小的选择得依靠经验或者交叉验证得到。k的选择可以使用交叉验证,也可以使用网格搜索。k的值越大,模型的偏差越大,对噪声数据越不敏感,当 k的值很大的时候,可能造成模型欠拟合。k的值越小,模型的方差就会越大,当 k的值很小的时候,就会造成模型的过拟合。
二维高斯核函数
如果让你写一个高斯模糊的函数,你该怎么写呢?
`def gaussian_2d_kernel(kernel_size = 3,sigma = 0):kernel = np.zeros([kernel_size,kernel_size])center = kernel_size // 2if sigma == 0:sigma = ((kernel_size-1)*0.5 - 1)*0.3 + 0.8s = 2*(sigma**2)sum_val = 0for i in range(0,kernel_size):for j in range(0,kernel_size):x = i-centery = j-centerkernel[i,j] = np.exp(-(x**2+y**2) / s)sum_val += kernel[i,j]#/(np.pi * s)sum_val = 1/sum_valreturn kernel*sum_val`
训练采样方法
交叉验证 留一法 自助法(bootstrap):有放回的抽样方法,可能会抽到重复的样本
Kmean和GMM原理、区别、应用场景
kmeans的收敛性?
可以看这里 https://zhuanlan.zhihu.com/p/36331115 也可以看百面机器学习P93、P102
如何在多台计算机上做kmeans
其实是这样的,先分布到n台机器上,要保证k个初始化相同,经过一次迭代后,拿到k*n个新的mean,放到一台新的机器上,因为初始化相同,所以mean的排列相同,然后对属于每个类的n个mean做加权平均,再放回每台机器上做下一步迭代。
KNN算法以及流程
K值的选择:
K值较小,则模型复杂度较高,容易发生过拟合,学习的估计误差会增大,预测结果对近邻的实例点非常敏感。 K值较大可以减少学习的估计误差,但是学习的近似误差会增大,与输入实例较远的训练实例也会对预测起作用,使预测发生错误,k值增大模型的复杂度会下降。 在应用中,k值一般取一个比较小的值,通常采用交叉验证法来来选取最优的K值。
KNN中的K值选取对分类的结果影响至关重要,K值选取的太小,模型太复杂。K值选取的太大,导致分类模糊。那么K值到底怎么选取呢?有人用Cross Validation,有人用贝叶斯,还有的用bootstrap。而距离度量又是另外一个问题,比较常用的是选用欧式距离。可是这个距离真的具有普适性吗?《模式分类》中指出欧式距离对平移是敏感的,这点严重影响了判定的结果。在此必须选用一个对已知的变换(比如平移、旋转、尺度变换等)不敏感的距离度量。书中提出了采用切空间距离(tangent distance)来替代传统的欧氏距离。
无监督学习和有监督学习的区别
有监督:
感知机 K近邻法 朴素贝叶斯 决策树 逻辑回归 支持向量机 提升方法 隐马尔科夫模型 条件随机场
无监督:
聚类-kmeans SVD奇异值分解 PCA主成分分析
生成式模型:LDA KNN 混合高斯 贝叶斯 马尔科夫 深度信念 判别式模型:SVM NN LR CRF CART
逻辑回归与SVM区别
逻辑回归即LR。LR预测数据的时候,给出的是一个预测结果为正类的概率,这个概率是通过sigmoid函数将wTx映射到[0,1]得到的,对于wTx正的很大时(可以认为离决策边界很远),得到为正类的概率趋近于1;对于wTx负的很大时(可以认为离决策边界很远),得到为正类的概率趋近于0。在LR中,跟“与决策边界距离”扯得上关系的仅此而已。在参数w求解过程中完全没有与决策边界距离的影子,所有样本都一视同仁。和感知机的不同之处在于,LR用到与决策边界的距离,是用来给预测结果一个可以看得到的置信区间。感知机里面没有这一考虑,只根据符号来判断。而SVM更进一步,在参数的求解过程中,便舍弃了距离决策边界过远的点。LR和感知机都很容易过拟合,只有SVM加入了L2范数之后的结构化风险最小化策略才解决了过拟合的问题。总结之:
感知机前后都没有引入与超平面“距离”的概念,它只关心是否在超平面的一侧; LR引入了距离,但是在训练模型求其参数的时候没有距离的概念,只是在最后预测阶段引入距离以表征分类的置信度; SVM两个地方有距离的概念:其一,在求超平面参数的时候有距离的概念,其表现为在与超平面一定距离内的点着重关注,而其他的一切点都不再关注。被关注的点称之为“支撑向量”。其二,预测新样本的时候,和LR一样,距离代表置信度。
逻辑回归只能解决二分类问题,多分类用softmax。相关参考链接
https://blog.csdn.net/maymay_/article/details/80016175 https://blog.csdn.net/jfhdd/article/details/52319422 https://www.cnblogs.com/eilearn/p/9026851.html
bagging boosting 和 提升树
bagging是通过结合几个模型降低泛化误差,分别训练几个不同的模型,然后让所有的模型表决测试样例的输出。模型平均奏效的原因是不同的模型通常不会在测试集上产生完全相同的误差。从原始样本集中抽取训练集.每轮从原始样本集中使用Bootstraping的方法抽取n个训练样本(在训练集中,有些样本可能被多次抽取到,而有些样本可能一次都没有被抽中).共进行k轮抽取,得到k个训练集.(k个训练集相互独立) Bagging是并行的学习算法,思想很简单,即每一次从原始数据中根据均匀概率分布有放回的抽取和原始数据集一样大小的数据集合。样本点可以出现重复,然后对每一次产生的数据集构造一个分类器,再对分类器进行组合。对于分类问题,将上步得到的k个模型采用投票的方式得到分类结果;对回归问题,计算上述模型的均值作为最后的结果. Boosting是一族可将弱学习器提升为强学习器的算法.Boosting的每一次抽样的样本分布是不一样的,每一次迭代,都是根据上一次迭代的结果,增加被错误分类的样本的权重。使模型在之后的迭代中更加注重难以分类的样本。这是一个不断学习的过程,也是一个不断提升的过程,这就是Boosting思想的本质所在。迭代之后,将每次迭代的基分类器进行集成,那么如何进行样本权重的调整和分类器的集成是我们需要考虑的关键问题。
Bagging和Boosting的区别:
1)样本选择上:Bagging:训练集是在原始集中有放回选取的,从原始集中选出的各轮训练集之间是独立的. Boosting:每一轮的训练集不变,只是训练集中每个样例在分类器中的权重发生变化.而权值是根据上一轮的分类结果进行调整. 2)样例权重:Bagging:使用均匀取样,每个样例的权重相等 Boosting:根据错误率不断调整样例的权值,错误率越大则权重越大. 3)预测函数:Bagging:所有预测函数的权重相等. Boosting:每个弱分类器都有相应的权重,对于分类误差小的分类器会有更大的权重. 4)并行计算:Bagging:各个预测函数可以并行生成 Boosting:各个预测函数只能顺序生成,因为后一个模型参数需要前一轮模型的结果.
Bagging 是 Bootstrap Aggregating 的简称,意思就是再取样 (Bootstrap) 然后在每个样本上训练出来的模型取平均,所以是降低模型的 variance. Bagging 比如 Random Forest 这种先天并行的算法都有这个效果。Boosting 则是迭代算法,每一次迭代都根据上一次迭代的预测结果对样本进行加权,所以随着迭代不断进行,误差会越来越小,所以模型的 bias 会不断降低High variance 是model过于复杂overfit,记住太多细节noise,受outlier影响很大;high bias是underfit,model过于简单,cost function不够好。boosting是把许多弱的分类器组合成一个强的分类器。弱的分类器bias高,而强的分类器bias低,所以说boosting起到了降低bias的作用。variance不是boosting的主要考虑因素。bagging是对许多强(甚至过强)的分类器求平均。在这里,每个单独的分类器的bias都是低的,平均之后bias依然低;而每个单独的分类器都强到可能产生overfitting的程度,也就是variance高,求平均的操作起到的作用就是降低这个variance。Bagging算法的代表:RandomForest随机森林算法的注意点:
在构建决策树的过程中是不需要剪枝的。 整个森林的树的数量和每棵树的特征需要人为进行设定。 构建决策树的时候分裂节点的选择是依据最小基尼系数的。
咱们机器学习升级版的随机森林章节,我用白板写了写这个公式:p = 1 - (1 - 1/N)^N,其意义是:一个样本在一次决策树生成过程中,被选中作为训练样本的概率,当N足够大时,约等于63.2%。简言之,即一个样本被选中的概率是63.2%,根据二项分布的的期望,这意味着大约有63.2%的样本被选中。即有63.2%的样本是不重复的,有36.8%的样本可能没有在本次训练样本集中。随机森林是一个包含多个决策树的分类器,并且其输出的类别是由个别树输出的类别的众数而定。随机森林的随机性体现在每颗树的训练样本是随机的,树中每个节点的分裂属性集合也是随机选择确定的。有了这2个随机的保证,随机森林就不会产生过拟合的现象了。随机森林是用一种随机的方式建立的一个森林,森林是由很多棵决策树组成的,每棵树所分配的训练样本是随机的,树中每个节点的分裂属性集合也是随机选择确定的。
SVM
相关的notebook除了cs231n也可以看这里。
凸集、凸函数、凸优化
面试见得比较少,感兴趣的可以看下:
为什么深度学习中的图像分割要先编码后解码
降采样是手段不是目的:
降低显存和计算量,图小了显存也小,计算量也小; 增大感受野,使用同样3x3的卷积能在更大的图像范围上进行特征提取。大感受野对分割很重要,小感受野做不了多分类分割,而且分割出来很粗糙 多出几条不同程度额下采样分支,可以方便进行多尺度特征的融合。多级语义融合会让分类更加准确。
降采样的理论意义,我简单朗读一下,它可以增加对输入图像的一些小扰动的鲁棒性,比如图像平移,旋转等,减少过拟合的风险,降低运算量,和增加感受野的大小。相关链接:为什么深度学习中的图像分割要先编码再解码?
(全局)平均池化average pooling和(全局)最大池化max pooling的区别
最大池化保留了纹理特征 平均池化保留整体的数据特征 全局平均池化有定位的作用(看知乎)
最大池化提取边缘等“最重要”的特征,而平均池化提取的特征更加smoothly。对于图像数据,你可以看到差异。虽然两者都是出于同样的原因使用,但我认为max pooling更适合提取极端功能。平均池有时不能提取好的特征,因为它将全部计入并计算出平均值,这对于对象检测类型任务可能不好用但使用平均池化的一个动机是每个空间位置具有用于期望特征的检测器,并且通过平均每个空间位置,其行为类似于平均输入图像的不同平移的预测(有点像数据增加)。Resnet不是采用传统的完全连通层进行CNN分类,而是直接从最后一个mlp转换层输出特征图的空间平均值,作为通过全局平均合并层的类别置信度,然后将得到的矢量输入到 softmax层。相比之下,Global average更有意义且可解释,因为它强制实现了feature和类别之间的对应关系,这可以通过使用网络的更强大的本地建模来实现。此外,完全连接的层易于过拟合并且严重依赖于 dropout 正则化,而全局平均池化本身就是起到了正则化作用,其本身防止整体结构的过拟合。
https://zhuanlan.zhihu.com/p/42384808 https://www.zhihu.com/question/335595503/answer/778307744 https://www.zhihu.com/question/309713971/answer/578634764
全连接的作用,与1x1卷积层的关系
在实际使用中,全连接层可由卷积操作实现:对前层是全连接的全连接层可以转化为卷积核为1x1的卷积;而前层是卷积层的全连接层可以转化为卷积核为hxw的全局卷积,h和w分别为前层卷积结果的高和宽使用 global average pooling 全局平均池化来代替卷积
全连接层(fully connected layers,FC)在整个卷积神经网络中起到“分类器”的作用。如果说卷积层、池化层和激活函数层等操作是将原始数据映射到隐层特征空间的话,全连接层则起到将学到的“分布式特征表示”映射到样本标记空间的作用。在实际使用中,全连接层可由卷积操作实现:对前层是全连接的全连接层可以转化为卷积核为1x1的卷积;而前层是卷积层的全连接层可以转化为卷积核为hxw的全局卷积,h和w分别为前层卷积结果的高和宽
那么,1*1卷积的主要作用有以下几点:
降维( dimension reductionality )。比如,一张500x500且厚度depth为100的图片在20个filter上做 1*1的卷积,那么结果的大小为500*500*20。加入非线性。卷积层之后经过激励层,1*1的卷积在前一层的学习表示上添加了非线性激励( non-linear activation ),提升网络的表达能力,但是也可以这样说:使之由单纯的线性变换,变为复杂的feature map之间的线性组合,从而实现特征的高度抽象过程。这一过程视为由线性变换为非线性,提高抽象程度。而非加入激活函数的作用。 个人应该是降维或者升维来减小参数个数和增加网络深度,以及跨通道的特征聚合 可以代替全连接层
看这个问题的回答 https://www.zhihu.com/question/56024942/answer/369745892
看这个问题的回答 https://www.zhihu.com/question/41037974/answer/150522307
concat与add(sum)的区别
对于两路输入来说,如果是通道数相同且后面带卷积的话,add等价于concat之后对应通道共享同一个卷积核。下面具体用式子解释一下。由于每个输出通道的卷积核是独立的,我们可以只看单个通道的输出。假设两路输入的通道分别为X1, X2, ..., Xc和Y1, Y2, ..., Yc。那么concat的单个输出通道为(*表示卷积):
而add的单个输出通道为:
因此add相当于加了一种prior,当两路输入可以具有“对应通道的特征图语义类似”(可能不太严谨)的性质的时候,可以用add来替代concat,这样更节省参数和计算量(concat是add的2倍)。FPN[1]里的金字塔,是希望把分辨率最小但语义最强的特征图增加分辨率,从性质上是可以用add的。如果用concat,因为分辨率小的特征通道数更多,计算量是一笔不少的开销。https://www.zhihu.com/question/306213462/answer/562776112
concat改成sum确实会好很多,这两个都是特征融合,到底有什么本质区别呢?我用的时候也没什么原则就是两个都试一下(其实更喜欢用sum,毕竟更省显存)。 我之前做过类似ASP的实验,金字塔型空洞卷积融合,最后实验结果sum比concat要好一些,但是原因不知道怎么解释 我看过一些论文是concat比sum好的,可能这跟数据集等具体情况有关吧 不同的特征 sum 了,有什么意义呢,这些特征又损失了吧;如果直接 concat,让后面的网络学习,应该更好啊,用到的特征更多了
SSD怎么改动变成FasterRCNN
SSD是直接分类,而FasterRcnn是先判断是否为背景再进行分类。一个是直接细分类,一个是先粗分类再细分类。
反向传播的原理
反向传播原理看CS231n中的BP过程,以及Jacobian的传播。
GD、SGD、mini batch GD的区别
在百面深度学习中有相应的章节。
偏差、方差
有一篇文章比较好的介绍了,还有在那本电子版CNNbook中也有。
http://scott.fortmann-roe.com/docs/BiasVariance.html 泛化误差可以分解成偏差的平方+方差+噪声 偏差度量了学习算法的期望预测和真实结果的偏离程度,刻画了学习算法本身的拟合能力 方差度量了同样大小的训练集的变动所导致的学习性能的变化,刻画了数据 扰动所造成的干扰 噪声表达了当前任务上学习任何算法所能达到的期望泛化误差下界,刻画了问题本身的难度。 偏差和方差一般称为bias和variance,一般训练误差越强,偏差越小,方差越大,泛化误差在中间会有一个最小值。 如果偏差较大,方差较小,此时为欠拟合,而偏差较小,方差较大为过拟合。
为什么会梯度爆炸,如何防止
多层神经网络通常存在像悬崖一样的结构,这是由于几个较大的权重相乘导致的。遇到斜率很大的悬崖结构,梯度更新会很大程序地改变参数值,通常会完全跳过这类悬崖的结构。花书P177.
分布式训练,多卡训练
http://ai.51cto.com/art/201710/555389.htm
https://blog.csdn.net/xs11222211/article/details/82931120#commentBox
精确率和召回率以及PR曲线
这个讲的比较好(TP与FP和ROC曲线):
https://segmentfault.com/a/1190000014829322
精确率是指分类正确的正样本个数占分类器判定为正样本的样本个数的比例。召回率是指分类正确的正样本个数占真正的正样本个数的比例。Precision值和Recall值是既矛盾又统一的两个指标,为了提高Precision值,分类器需要尽量在“更有把握”时才把样本预测为正样本,但此时往往会因为过于保守而漏掉很多“没有把握”的正样本,导致Recall值很低。如何权衡这两个值,所以出现了PR曲线、ROC曲线以及F1 score等更多的标准来进行判断。https://www.cnblogs.com/xuexuefirst/p/8858274.html
Yolov2相比Yolov1因为采用了先验框(Anchor Boxes),模型的召回率大幅提升,同时map轻微下降了0.2。
https://segmentfault.com/a/1190000014829322
https://www.cnblogs.com/eilearn/p/9071440.html
https://blog.csdn.net/zdh2010xyz/article/details/54293298
空洞卷积
空洞卷积一般都伴有padding,如果dilation=6,那么padding也等于6。通过空洞卷积后的卷积特征图的大小不变,但是这个卷积的感受野比普通同等大小的卷积大。不过通道数是可以改变的。
在DeepLabv3+中,最后的ASPP层,通过一个1x1卷积和3个3x3的空洞卷积,再concat上一个经过全局平均池化后双线性采样到同等维度的特征图。
但是要注意,由于空洞卷积本身不会增大运算量,但是后续的分辨率没有减小,后面的计算量就间接变大了。https://zhuanlan.zhihu.com/p/52476083
数据不好怎么办,数据不均衡怎么处理、只有少量带标签怎么处理
具体问题具体分析。
训练过程中需要过拟合情况怎么办
深度学习-通用模型调试技巧 如何根据训练/验证损失曲线诊断我们的CNN 关于训练神经网路的诸多技巧Tricks(完全总结版) 深度学习中数据集很小是一种什么样的体验
如果模型的实际容量比较大,那么可以说模型可以完全学习到整个数据集,会发生过拟合。这时候再添加新的数据进去,模型的性能会进一步提升,说明模型还没有被撑死。期望风险是模型关于联合分布的期望损失,经验风险是模型关于训练数据集的平均损失。根据大树定律,当样本容量N趋于无穷时,经验风险趋于期望风险。但是当样本的容量比较小的的时候,经验风险最小化学习的效果未必就会很好,会产生“过拟合”的现象。结构风险最小化是为了防止过拟合而提出的策略。
https://lilianweng.github.io/lil-log/2019/03/14/are-deep-neural-networks-dramatically-overfitted.html
https://www.jianshu.com/p/97aafe479fa1 (重要)
正则化
在Pytorch中只能在optim中设置weight_decay,目前只支持L2正则,而且这个正则是针对模型中所有的参数,不论是w还是b,也包括BN中的W和b。
BN层和L2正则化一起有什么后果
就是因为 batch norm 过后, weight 影响没那么重了,所以 l2 weight decay 的效果就不明显了。证明了L2正则化与归一化相结合时没有正则化效应。相反,正则化会影响权重的范围,从而影响有效学习率。
https://www.cnblogs.com/makefile/p/batch-norm.html?utm_source=debugrun&utm_medium=referral
ROIPooling和ROIAlign的区别
空间金字塔池化(SSP)可以使不同尺寸的图像产生固定的输出维度。借题也问个问题,为什么fast rcnn的roi pooling是一个max pooling呢?roi pooling后面也是做单个roi的classification,为啥不和classification的pooling不同?我直觉是看feature map中的一个channel,提取全局特征(如,做classification)用average pooling,提取提取全局信息;提取局部特征(如,roi pooling)应该用max pooling,提取局部最明显的特征,成为7×7的grid后交给后面的fc来做classification。相关介绍:
SPPNet-引入空间金字塔池化改进RCNN
自己实现图像增强算法
https://zhuanlan.zhihu.com/p/71231560
图像分类的tricks
亚马逊:用CNN进行图像分类的Tricks(https://mp.weixin.qq.com/s/e4m_LhtqoUiGJMQfEZHcRA)
消融实验(Ablation experiment)
因为作者提出了一种方案,同时改变了多个条件/参数,他在接下去的消融实验中,会一一控制一个条件/参数不变,来看看结果,到底是哪个条件/参数对结果的影响更大。下面这段话摘自知乎,@人民艺术家:你朋友说你今天的样子很帅,你想知道发型、上衣和裤子分别起了多大的作用,于是你换了几个发型,你朋友说还是挺帅的,你又换了件上衣,你朋友说不帅了,看来这件衣服还挺重要的。
手撸NMS与soft-NMS
https://oldpan.me/archives/write-hard-nms-c
逻辑回归和线性回归
线性回归:通过均方误差来寻找最优的参数,然后通过最小二乘法来或者梯度下降法估计:

线性回归和逻辑回归都是广义线性回归模型的特例 线性回归只能用于回归问题,逻辑回归用于分类问题(可由二分类推广至多分类) 线性回归无联系函数或不起作用,逻辑回归的联系函数是对数几率函数,属于Sigmoid函数 线性回归使用最小二乘法作为参数估计方法,逻辑回归使用极大似然法作为参数估计方法 两者都可以使用梯度下降法
注意:
线性回归的梯度下降法其实和我们训练神经网络一直,首先需要对参数进行初始化,然后使用随机梯度下降的方式对参数进行更新:https://zhuanlan.zhihu.com/p/33992985 线性回归与最小二乘法:https://zhuanlan.zhihu.com/p/36910496 最大似然 https://zhuanlan.zhihu.com/p/33349381
来源文章:
https://segmentfault.com/a/1190000014807779 https://zhuanlan.zhihu.com/p/39363869 https://blog.csdn.net/hahaha_2017/article/details/81066673
对于凸函数来说,局部最优就是全局最优,相关链接:http://sofasofa.io/forum_main_post.php?postid=1000329
http://sofasofa.io/forum_main_post.php?postid=1000322Logistic classification with cross-entropy
什么是attention,有哪几种
https://zhuanlan.zhihu.com/p/61440116
https://www.zhihu.com/question/65044831/answer/227262160
深度学习的线性和非线性
卷积是线性的 激活函数是非线性的
梯度消失和梯度爆炸的问题

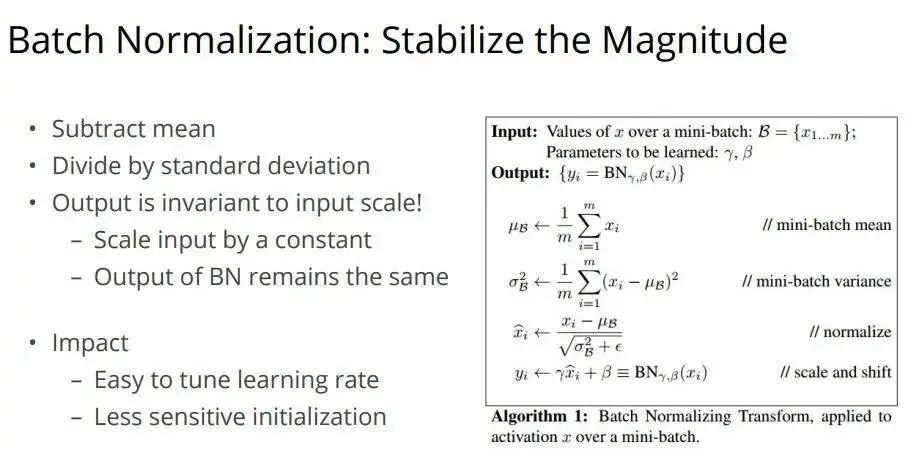
Batch-norm层的作用
不看必进坑~不论是训练还是部署都会让你踩坑的Batch Normalization
Batch size过小会使Loss曲线振荡的比较大,大小一般按照2的次幂规律选择,至于为什么?没有答出来,面试官后面解释是为了硬件计算效率考虑的,海哥后来也说GPU训练的时候开的线程是2的次幂个神经网络的本质是学习数据的分布,如果训练数据与测试数据的分布不同则会大大降低网络的泛化能力。随着网络训练的进行,每个隐层的变化使得后一层的输入发生变化,从而每一批训练的数据的分布也会变化,致使网络在每次迭代过程中都需要拟合不同的数据分布,增加数据训练的复杂度和过拟合的风险。
对数据的剧烈变化有抵抗能力。

要注意BN在卷积网络层中,因为参数的共享机制,每一个卷积核的参数在不同位置的神经元当中是共享的,因此也应该被归一化。(具体看一下实现过程)https://leonardoaraujosantos.gitbooks.io/artificial-inteligence/batch_norm_layer.html但是在训练过程中如果batch-size不大的话,可以不使用BN(MaskRcnn这样说的)。至此,关于Batch Normalization的理论与实战部分就介绍道这里。总的来说,BN通过将每一层网络的输入进行normalization,保证输入分布的均值与方差固定在一定范围内,减少了网络中的Internal Covariate Shift问题,并在一定程度上缓解了梯度消失,加速了模型收敛;并且BN使得网络对参数、激活函数更加具有鲁棒性,降低了神经网络模型训练和调参的复杂度;最后BN训练过程中由于使用mini-batch的mean/variance作为总体样本统计量估计,引入了随机噪声,在一定程度上对模型起到了正则化的效果。
https://zhuanlan.zhihu.com/p/34879333
BN与贝叶斯的关系:
从Bayesian角度浅析Batch Normalization
BN跨卡训练怎么保证相同的mean和var
在实践中,我发现,跨卡同步的BN对于performance相当有用。尤其是对于detection,segmentation任务,本来Batch size较小。如果Batch Norm能跨卡同步的话,就相当于增大了Batch Norm的batch size 这样能估计更加准确的mean和variance,所以这个操作能提升performance。
如何实现SyncBN
跨卡同步BN的关键是在前向运算的时候拿到全局的均值和方差,在后向运算时候得到相应的全局梯度。最简单的实现方法是先同步求均值,再发回各卡然后同步求方差,但是这样就同步了两次。实际上只需要同步一次就可以,我们使用了一个非常简单的技巧,改变方差的公式(公式是图片,具体大家自己网上搜一下SyncBN)。这样在前向运算的时候,我们只需要在各卡上算出与,再跨卡求出全局的和即可得到正确的均值和方差, 同理我们在后向运算的时候只需同步一次,求出相应的梯度与。我们在最近的论文Context Encoding for Semantic Segmentation 里面也分享了这种同步一次的方法。有了跨卡BN我们就不用担心模型过大用多卡影响收敛效果了,因为不管用多少张卡只要全局的批量大小一样,都会得到相同的效果。
ResNet为什么好用
出现因素:
随着网络的加深,优化函数越来越陷入局部最优解 随着网络层数的增加,梯度消失的问题更加严重,因为梯度在反向传播的时候会逐渐衰减
原因,误差传播公式可以写成参数W和导数F连乘的形式,当误差由第L层传播到输入以外的第一个隐含层的时候,会涉及到很多很多的参数和导数的连乘,这时误差很容易产生消失或者膨胀,导致不容易学习,拟合能力和泛化能力较差。残差层中的F层只需要拟合输入x与目标输出H的残差H-x即可,如果某一层的输出已经较好地拟合了期望结果,那么多一层也不回使得模型变得更差,因为该层的输出直接被短接到两层之后,相当于直接学习了一个恒等映射,而跳过的两层只需要拟合上层输出和目标之间的残差即可。
https://zhuanlan.zhihu.com/p/42706477 https://zhuanlan.zhihu.com/p/31852747

Resnet的缺点
resnet其实无法真正的实现梯度消失,这里面有很强的先验假设,并且resnet真正起作用的层只在中间,深层作用比较小(到了深层就是恒等映射了),feature存在利用不足的现象,add的方式阻碍了梯度和信息的流通。
L1范数和L2范数 应用场景
L1正则可以使少数权值较大,多数权值为0,得到稀疏的权值;L2正则会使权值都趋近于0但非零,得到平滑的权值;https://zhuanlan.zhihu.com/p/35356992
网络初始化有哪些方式,他们的公式初始化过程
目前的权重初始化分为三类:
全置为0 - 几乎不会使用 随机初始化(均匀随机、正态分布) Xavier 作者 Glorot 认为,优秀的初始化应该使得各层的激活值和状态梯度的方差在传播过程中保持一致。适合sigmoid,但是不适合Relu。 He初始化适用于Relu。
初始化,说白了就是构建一个平滑的局部几何空间从而使得优化更简单xavier分布解析:
https://prateekvjoshi.com/2016/03/29/understanding-xavier-initialization-in-deep-neural-networks/
假设使用的是sigmoid函数。当权重值(值指的是绝对值)过小,输入值每经过网络层,方差都会减少,每一层的加权和很小,在sigmoid函数0附件的区域相当于线性函数,失去了DNN的非线性性。当权重的值过大,输入值经过每一层后方差会迅速上升,每层的输出值将会很大,此时每层的梯度将会趋近于0. xavier初始化可以使得输入值x 方差经过网络层后的输出值y方差不变。
https://blog.csdn.net/winycg/article/details/86649832 https://zhuanlan.zhihu.com/p/57454669
在pytorch中默认的权重初始化方式是何凯明的那个,举个例子:
resnet中权重的初始化
for m in self.modules():if isinstance(m, nn.Conv2d):nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')elif isinstance(m, nn.BatchNorm2d):nn.init.constant_(m.weight, 1)nn.init.constant_(m.bias, 0)# Zero-initialize the last BN in each residual branch,# so that the residual branch starts with zeros, and each residual block behaves like an identity.# This improves the model by 0.2~0.3% according to https://arxiv.org/abs/1706.02677if zero_init_residual:for m in self.modules():if isinstance(m, Bottleneck):nn.init.constant_(m.bn3.weight, 0)elif isinstance(m, BasicBlock):nn.init.constant_(m.bn2.weight, 0)
求解模型参数量
def model_info(model): # Plots a line-by-line description of a PyTorch modeln_p = sum(x.numel() for x in model.parameters()) # number parametersn_g = sum(x.numel() for x in model.parameters() if x.requires_grad) # number gradientsprint('\n%5s %50s %9s %12s %20s %12s %12s' % ('layer', 'name', 'gradient', 'parameters', 'shape', 'mu', 'sigma'))for i, (name, p) in enumerate(model.named_parameters()):name = name.replace('module_list.', '')print('%5g %50s %9s %12g %20s %12.3g %12.3g' % (i, name, p.requires_grad, p.numel(), list(p.shape), p.mean(), p.std()))print('Model Summary: %d layers, %d parameters, %d gradients' % (i + 1, n_p, n_g))print('Model Size: %f MB parameters, %f MB gradients\n' % (n_p*4/1e6, n_g*4/1e6))
卷积计算量
差不多这几个懂了就OK。
普通卷积 可分离卷积 全连接 点卷积
可以看老潘的这篇文章:
多标签和多分类
那么,如何用softmax和sigmoid来做多类分类和多标签分类呢?
1、如何用softmax做多分类和多标签分类 现假设,神经网络模型最后的输出是这样一个向量logits=[1,2,3,4], 就是神经网络最终的全连接的输出。这里假设总共有4个分类。用softmax做多分类的方法: tf.argmax(tf.softmax(logits))首先用softmax将logits转换成一个概率分布,然后取概率值最大的作为样本的分类,这样看似乎,tf.argmax(logits)同样可以取得最大的值,也能得到正确的样本分类,这样的话softmax似乎作用不大.那么softmax的主要作用其实是在计算交叉熵上,首先样本集中y是一个one-hot向量,如果直接将模型输出logits和y来计算交叉熵,因为logits=[1,2,3,4],计算出来的交叉熵肯定很大,这种计算方式不对,而应该将logits转换成一个概率分布后再来计算,就是用tf.softmax(logits)和y来计算交叉熵,当然我们也可以直接用tensorflow提供的方法sofmax_cross_entropy_with_logits来计算 这个方法传入的参数可以直接是logits,因为这个根据方法的名字可以看到,方法内部会将参数用softmax进行处理,现在我们取的概率分布中最大的作为最终的分类结果,这是多分类。我们也可以取概率的top几个,作为最终的多个标签,或者设置一个阈值,并取大于概率阈值的。这就用softmax实现了多标签分类。
2、如何用sigmoid做多标签分类 sigmoid一般不用来做多类分类,而是用来做二分类的,它是将一个标量数字转换到[0,1]之间,如果大于一个概率阈值(一般是0.5),则认为属于某个类别,否则不属于某个类别。那么如何用sigmoid来做多标签分类呢?其实就是针对logits中每个分类计算的结果分别作用一个sigmoid分类器,分别判定样本是否属于某个类别。同样假设,神经网络模型最后的输出是这样一个向量logits=[1,2,3,4], 就是神经网络最终的全连接的输出。这里假设总共有4个分类。tf.sigmoid(logits)sigmoid应该会将logits中每个数字都变成[0,1]之间的概率值,假设结果为[0.01, 0.05, 0.4, 0.6],然后设置一个概率阈值,比如0.3,如果概率值大于0.3,则判定类别符合,那这里,样本会被判定为类别3和类别4都符合。
数据的输入为什么要归一化
为了消除数据特征之间的量纲影响在实际应用中,通过梯度下降法求解的模型通常是需要数据归一化的,包括线性回归、逻辑回归、支持向量机、神经网络等,但是决策模型不是很适用。
为什么说朴素贝叶斯是高偏差低方差?
首先,假设你知道训练集和测试集的关系。简单来讲是我们要在训练集上学习一个模型,然后拿到测试集去用,效果好不好要根据测试集的错误率来衡量。但很多时候,我们只能假设测试集和训练集的是符合同一个数据分布的,但却拿不到真正的测试数据。这时候怎么在只看到训练错误率的情况下,去衡量测试错误率呢?
由于训练样本很少(至少不足够多),所以通过训练集得到的模型,总不是真正正确的。(就算在训练集上正确率100%,也不能说明它刻画了真实的数据分布,要知道刻画真实的数据分布才是我们的目的,而不是只刻画训练集的有限的数据点)。而且,实际中,训练样本往往还有一定的噪音误差,所以如果太追求在训练集上的完美而采用一个很复杂的模型,会使得模型把训练集里面的误差都当成了真实的数据分布特征,从而得到错误的数据分布估计。这样的话,到了真正的测试集上就错的一塌糊涂了(这种现象叫过拟合)。但是也不能用太简单的模型,否则在数据分布比较复杂的时候,模型就不足以刻画数据分布了(体现为连在训练集上的错误率都很高,这种现象较欠拟合)。过拟合表明采用的模型比真实的数据分布更复杂,而欠拟合表示采用的模型比真实的数据分布要简单。
在统计学习框架下,大家刻画模型复杂度的时候,有这么个观点,认为Error = Bias + Variance。这里的Error大概可以理解为模型的预测错误率,是有两部分组成的,一部分是由于模型太简单而带来的估计不准确的部分(Bias),另一部分是由于模型太复杂而带来的更大的变化空间和不确定性(Variance)。
所以,这样就容易分析朴素贝叶斯了。它简单的假设了各个数据之间是无关的,是一个被严重简化了的模型。所以,对于这样一个简单模型,大部分场合都会Bias部分大于Variance部分,也就是说高偏差而低方差。
在实际中,为了让Error尽量小,我们在选择模型的时候需要平衡Bias和Variance所占的比例,也就是平衡over-fitting和under-fitting。
Canny边缘检测,边界检测算法有哪些
https://zhuanlan.zhihu.com/p/42122107
https://zhuanlan.zhihu.com/p/59640437
传统的目标检测
传统的目标检测一般分为以下几个步骤:
区域选择:一幅图像通过selective search的方法,首先对原图进行分割(聚类),然后通过计算相邻区域的相似度,最终找到2000个框,同样要与GT进行正例和负例的判断。 特征提取:通过SIFT或者其他的特征提取方法,将2000个转化为特征向量 分类器分类:将特征向量放入SVM中进行分类训练,同时将父类也放入分类器中进行训练。
经典的结构:
HoG + SVM
传统方法的缺点:
基于滑窗的区域选择策略没有针对性,时间复杂度高,窗口冗余 手工设计的特征对环境多样性的变化并没有很好的鲁棒性
腐蚀膨胀、开运算闭运算
可以看学习OpenCV第三版中的相关内容,搜索erode、dilation
一些滤波器
https://blog.csdn.net/qq_22904277/article/details/53316415 https://www.jianshu.com/p/fbe8c24af108 https://blog.csdn.net/qq_22904277/article/details/53316415 https://blog.csdn.net/nima1994/article/details/79776802 https://blog.csdn.net/jiang_ming_/article/details/82594261 图像中的高频、低频信息以及高通滤波器、低通滤波器 在图像中,边缘信息等比较明显的变化比较剧烈的像素点就是图像中的高频信息。而除了边缘部分,比较平缓的像素点变化不是很剧烈的内容信息就是低频信息。 高通滤波器就是突出变化剧烈(边缘),去除低频部分,也就是当做边缘提取器。而低通滤波器主要是平滑该像素的亮度。主要用于去噪和模糊化,高斯模糊是最常用的模糊滤波器(平滑滤波器)之一,它是一个削弱高频信号强度的低通滤波器。
Resize双线性插值
在网络结构进行特征融合的时候,双线性插值的方式比转置卷积要好一点。因为转置卷积有一个比较大的问题就是如果参数配置不当,很容易出现输出feature map中带有明显棋盘状的现象。
需要注意的,最近邻插值的效果是最不好的。
双线性插值也分为两类:
align_corners=True align_corners=False
一般来说,使用align_corners=True可以保证边缘对齐,而使用align_corners=False则会导致边缘突出的情况。这个讲的非常好:
https://blog.csdn.net/qq_37577735/article/details/80041586
代码实现的讲解:
https://blog.csdn.net/love_image_xie/article/details/87969405 https://www.zhihu.com/question/328891283/answer/717113611 看这里的图像展示:https://discuss.pytorch.org/t/what-we-should-use-align-corners-false/22663
gradient clipping 梯度裁剪
为了避免梯度爆炸而做出的改进,注意要和提前终止区别开来。(提前终止是一种正则化方法,因为当训练有足够能力表示甚至会过拟合的大模型时,训练误差会随着时间的推移逐渐降低但验证集的误差会再次上升。这意味着只要我们返回使验证集误差最低的参数设置即可)第一种做法很容易理解,就是先设定一个 gradient 的范围如 (-1, 1), 小于 -1 的 gradient 设为 -1, 大于这个 1 的 gradient 设为 1.

https://wulc.me/2018/05/01/%E6%A2%AF%E5%BA%A6%E8%A3%81%E5%89%AA%E5%8F%8A%E5%85%B6%E4%BD%9C%E7%94%A8/
实现一个简单的卷积
实现卷积一般用的是im2col的形式,但是面试中我们简单实现一个滑窗法就行了。比如:用3x3的卷积核(滤波盒)实现卷积操作。NCNN中在PC端卷积的源码也是这样的。
`/*输入:imput[IC][IH][IW]IC = input.channelsIH = input.heightIW = input.width卷积核: kernel[KC1][KC2][KH][KW]KC1 = OCKC2 = ICKH = kernel.heightKW = kernel.width输出:output[OC][OH][OW]OC = output.channelsOH = output.heightOW = output.width其中,padding = VALID,stride=1,OH = IH - KH + 1OW = IW - KW + 1也就是先提前把Oh和Ow算出来,然后将卷积核和输入数据一一对应即可*/for(int ch=0;ch<output.channels;ch++){for(int oh=0;oh<output.height;oh++){for(int ow=0;ow<output.width;ow++){float sum=0;for(int kc=0;kc<kernel.channels;kc++){for(int kh=0;kh<kernel.height;kh++){for(int kw=0;kw<kernel.width;kw++){sum += input[kc][oh+kh][ow+kw]*kernel[ch][kc][kh][kw];}}}//if(bias) sum +=bias[]output[ch][oh][ow]=sum;}}}`
参考:
https://www.cnblogs.com/hejunlin1992/p/8686838.html
卷积的过程
看看Pytorch的源码与caffe的源码,都是将卷积计算转化为矩阵运算,im2col,然后gemm。https://blog.csdn.net/mrhiuser/article/details/52672824
转置卷积的计算过程
https://cloud.tencent.com/developer/article/1363619
1*1的卷积核有什么用,3*3的卷积核和一个1*3加一个3*1的有什么区别
1x1卷积可以改变上一层网络的通道数目。卷积核大于1x1,意味着提特征需要邻域信息。
若提取横向纹理,则横向邻域信息密度比纵向信息密度高。 核扁横着最科学。若提纵向纹理,同理,瘦高竖着最好。 若你想提取的纹理种类丰富,那横向邻域信息密度的期望~=纵向信息密度期望
所以对懒人来说,最优核的尺寸的期望是正方形。至于1*n和n*1,它们一般是搭配使用的,从而实现n*n卷积核的感受野,可以在减少参数的同时增加层数,在CNN的较高层中使用可以带来一定的优势。卷积核并非都是正方形的,还可以是矩形,比如3*5,在文本检测和车牌检测当中就有应用,这种设计主要针对文本行或者车牌的形状,能更好的学习特征。其实我觉得方形矩形影响不大,网络的学习能力是非常强的。当然我们也可以学习卷积的形状,类似于deformable convolution,老潘后续会讲下。
ResNet中bottlenet与mobilenetv2的inverted结构对比
注意,resnet中是先降维再升维,而mobilenetv2中是先升维后降维(所以称之为inversed)。
https://zhuanlan.zhihu.com/p/67872001 https://zhuanlan.zhihu.com/p/32913695
卷积特征图大小的计算
很简单但是也很容易错的问题:
Conv2D 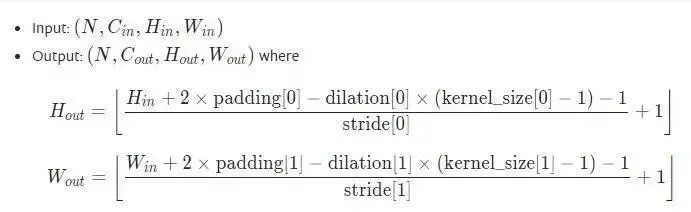
动态图和静态图的区别
静态图是建立一次,然后不断复用;静态图可以在磁盘中序列化,可以保存整个网络的结构,可以重载,在部署中很实用,在tensorflow静态图中条件和循环需要特定的语法,pytorch只用python的语法就可以实现 而动态图是每次使用的时候建立,不容易优化,需要重复之前的代码,但是动态图比静态图代码更简洁
依据采用动态计算或是静态计算的不同,可以将这些众多的深度学习框架划分成两大阵营,当然也有些框架同时具有动态计算和静态计算两种机制(比如 MxNet 和最新的 TensorFlow)。动态计算意味着程序将按照我们编写命令的顺序进行执行。这种机制将使得调试更加容易,并且也使得我们将大脑中的想法转化为实际代码变得更加容易。而静态计算则意味着程序在编译执行时将先生成神经网络的结构,然后再执行相应操作。从理论上讲,静态计算这样的机制允许编译器进行更大程度的优化,但是这也意味着你所期望的程序与编译器实际执行之间存在着更多的代沟。这也意味着,代码中的错误将更加难以发现(比如,如果计算图的结构出现问题,你可能只有在代码执行到相应操作的时候才能发现它)。尽管理论上而言,静态计算图比动态计算图具有更好的性能,但是在实践中我们经常发现并不是这样的。
历年来所有的网络
这个可以看CS231n中的第九课以及
https://ucbrise.github.io/cs294-ai-sys-sp19/assets/lectures/lec02/classic_neural_architectures.pdf https://towardsdatascience.com/a-simple-guide-to-the-versions-of-the-inception-network-7fc52b863202
正式总结下:
LeNet-5:第一个卷积,用来识别手写数组,使用的卷积大小为5x5,s=1,就是普通的卷积核池化层结合起来,最后加上全连接层。 AlexNet:在第一个卷积中使用了11x11卷积,第一次使用Relu,使用了NormLayer但不是我们经常说的BN。使用了dropout,在两个GPU上进行了训练,使用的训练方式是模型并行、 ZFNet:AlexNet的加强版,将11x11卷积改成了7x7,也在AlexNet的基础上将卷积的通道深度加深。所以在分类比赛中比之前的效果好了些。 VGGNet:只使用了小卷积3x3(s=1)以及常规的池化层,不过深度比上一个深了一些,最后几层也都是全连接层接一个softmax。为什么使用3x3卷积,是因为三个3x3卷积的有效感受野和7x7的感受野一致,而且更深、更加非线性,而且卷积层的参数也更加地少,所以速度更快也可以适当加深层数。 GoogleNet:没有使用FC层,参数量相比之前的大大减少,提出了Inception module结构,也就是NIN结构(network within a network)。但是原始的Inception module计算量非常大,所以在每一个分支加了1x1 conv "bottleneck"结构(具体细节看图)。googlenet网络结构中为了避免梯度消失,在中间的两个位置加了两个softmax损失,所以会有三个loss,整个网络的loss是通过三个loss乘上权重相加后得到 相关文章:https://zhuanlan.zhihu.com/p/42704781 inception结构的特点:1、增加了网络的宽度,同时也提高了对于不同尺度的适应程度。2、使用 1x1 卷积核对输入的特征图进行降维处理,这样就会极大地减少参数量,从而减少计算量。3、在V3中使用了多个小卷积核代替大卷积核的方法,除了规整的的正方形,我们还有分解版本的 3x3 = 3x1 + 1x3,这个效果在深度较深的情况下比规整的卷积核更好。4、发明了Bottleneck 的核心思想还是利用多个小卷积核替代一个大卷积核,利用 1x1 卷积核替代大的卷积核的一部分工作。也就是先1x1降低通道然后普通3x3然后再1x1回去。 Xception:改进了inception,提出的 depthwise Separable Conv让人眼前一亮。https://www.jianshu.com/p/4708a09c4352ResNet:越深的网络越难进行优化,有一个特点需要搞明白,越深的层最起码表现应该和浅层的一样,不能比浅层的还差。对于更深的Resnet(50+),这里采用bottleneck层(也就是两个1x1分别降维和升维)去提升网络的效率。更详细的描述可以看百面机器学习和ppt。相关讲解:https://zhuanlan.zhihu.com/p/42706477 DenseNet 不能简单说densenet更好,二者比较,ResNet是更一般的模型,DenseNet是更特化的模型。DenseNet用于图像处理可能比ResNet表现更好,本质是DenseNet更能和图像的信息分布特点匹配,是使用了多尺度的Kernel。但是也有缺点最直接的计算就是一次推断中所产生的所有feature map数目。有些框架会有优化,自动把比较靠前的层的feature map释放掉,所以显存就会减少,或者inplace操作通过重新计算的方法减少一部分显存,但是densenet因为需要重复利用比较靠前的feature map,所以无法释放,导致显存占用过大。正是这种_concat_造成densenet能更密集的连接。 SeNet:全称为Squeeze-and-Excitation Networks。属于注意力特征提取的范畴,加了GP(Global pooling)和两个FC再加上sigmoid和scale。也就是生成注意力掩膜,去乘以输入的x得到新的x。核心思想就是去学习每个特征通道的重要程度,然后根据这个重要程度去提升有用的特征并抑制对当前任务用处不大的特征。这个给每一个特征层通道去乘以通过sigmoid得到的重要系数,其实和用bn层去观察哪个系数重要一样。缺点:由于在主干上存在 0~1 的 scale 操作,在网络较深 BP 优化时就会在靠近输入层容易出现梯度消散的情况,导致模型难以优化。http://www.sohu.com/a/161633191_465975 Wide Residual Networks ResNeXt:是resnet和inception的结合体,旁边的residual connection就是公式中的x直接连过来,然后剩下的是32组独立的同样结构的变换,最后再进行融合,符合split-transform-merge的模式。虽然分了32组,都是先点卷积降维,然后3x3普通卷积,然后1x1卷积升维(与Mobilenetv2中的相反) 相关介绍:https://zhuanlan.zhihu.com/p/51075096 Densely Connected Convolutional Networks:有利于减轻梯度消失的情况,增强了特征的流动。
shufflenet:https://blog.csdn.net/u011974639/article/details/79200559
一些统计知识
正太分布:https://blog.csdn.net/yaningli/article/details/78051361
关于如何训练(训练过程中的一些问题)
MaxPool导致的训练震荡(通过在MaxPool之后加上L2Norm):https://mp.weixin.qq.com/s/QR-KzLxOBazSbEFYoP334Q
全连接层的好伴侣:空间金字塔池化(SPP)
https://zhuanlan.zhihu.com/p/64510297
感受野计算
感受野计算有两个公式,一个普通公式一个通项公式:

需要注意,卷积和池化都可以增加感受野。
http://zike.io/posts/calculate-receptive-field-for-vgg-16/
如果觉得有用,就请分享到朋友圈吧!
往期精彩: