
3D感知技术及实践
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达
本文转自|新机器视觉










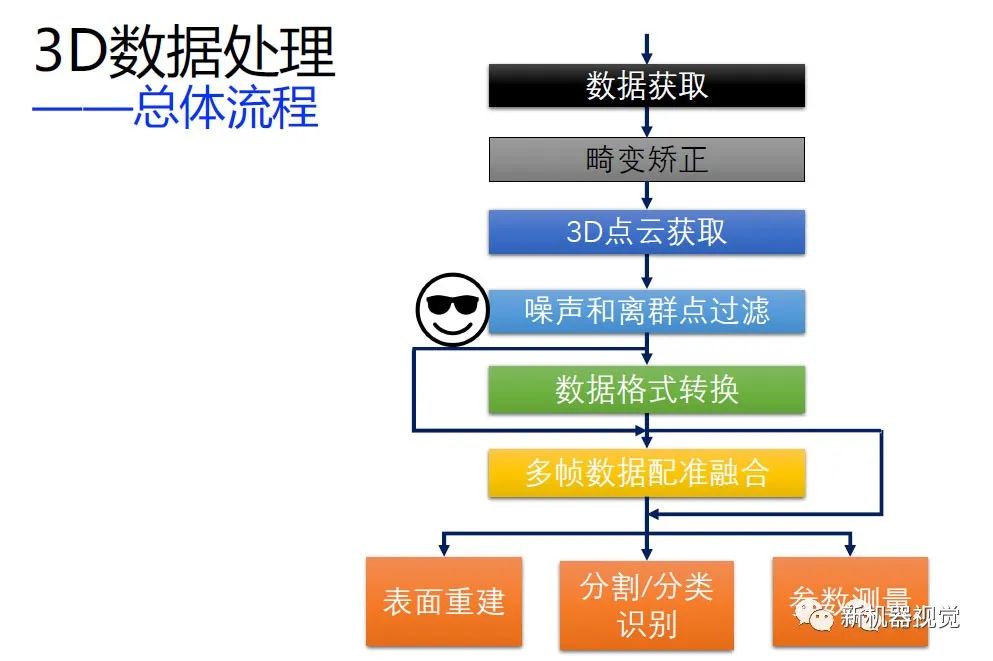
3D滤波、噪声过滤和表面平滑
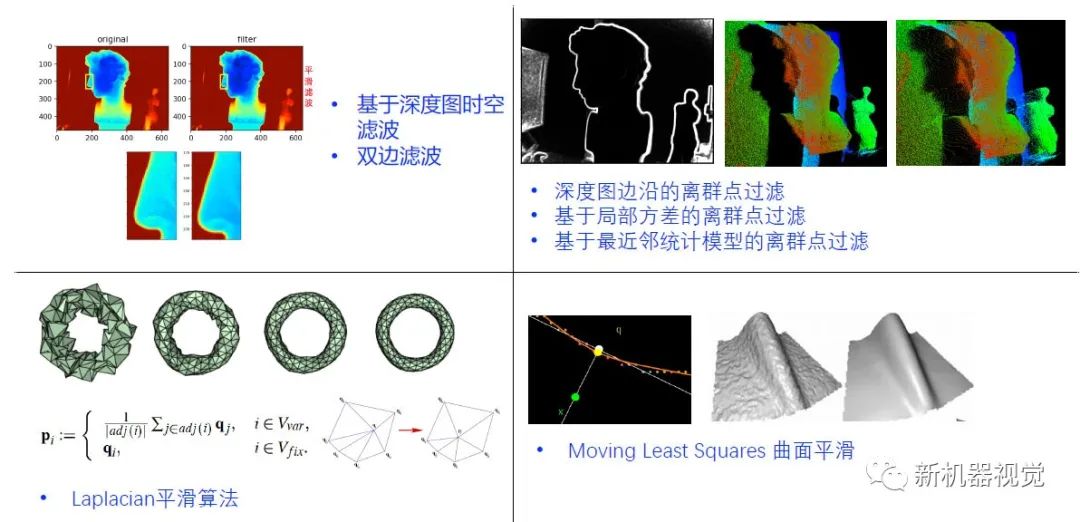
3D信号处理——深度图平滑滤波

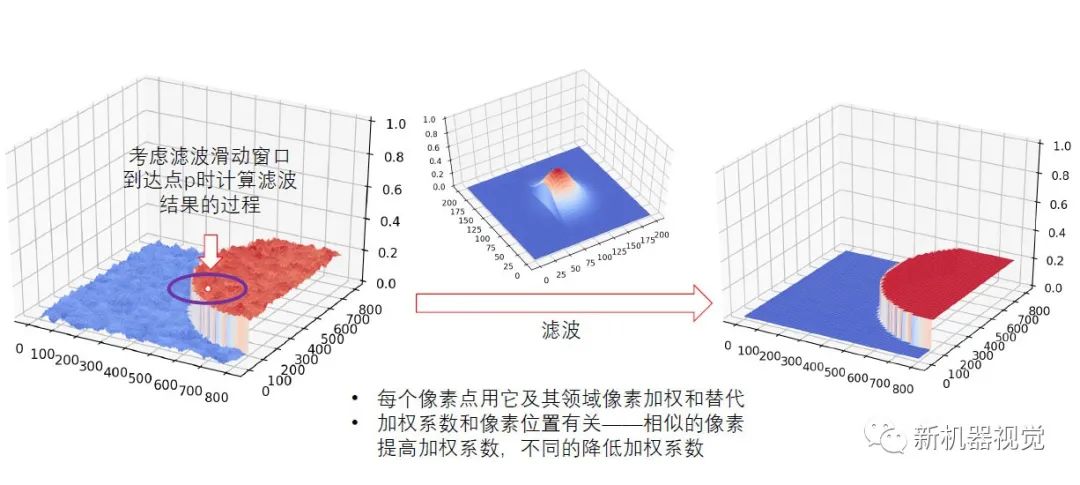
3D信号处理——深度图的双边滤波
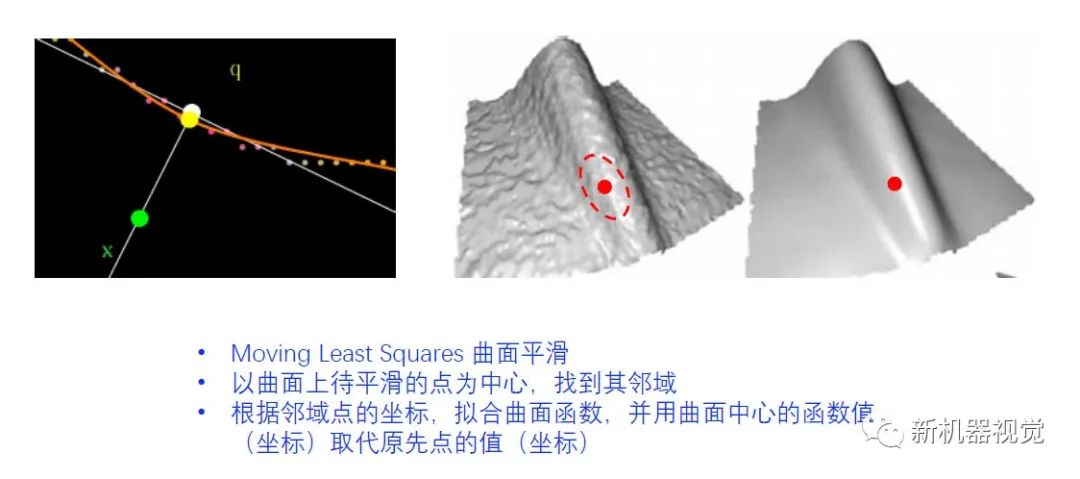
3D信号处理——表面平滑(三角网格表述的曲面)
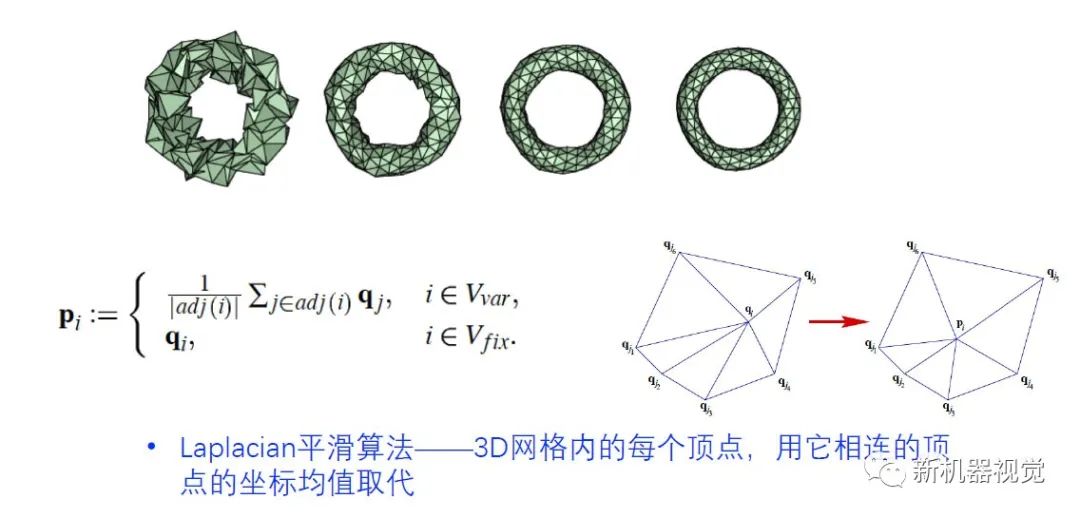
3D信号处理——表面平滑
3D信号处理——离群点过滤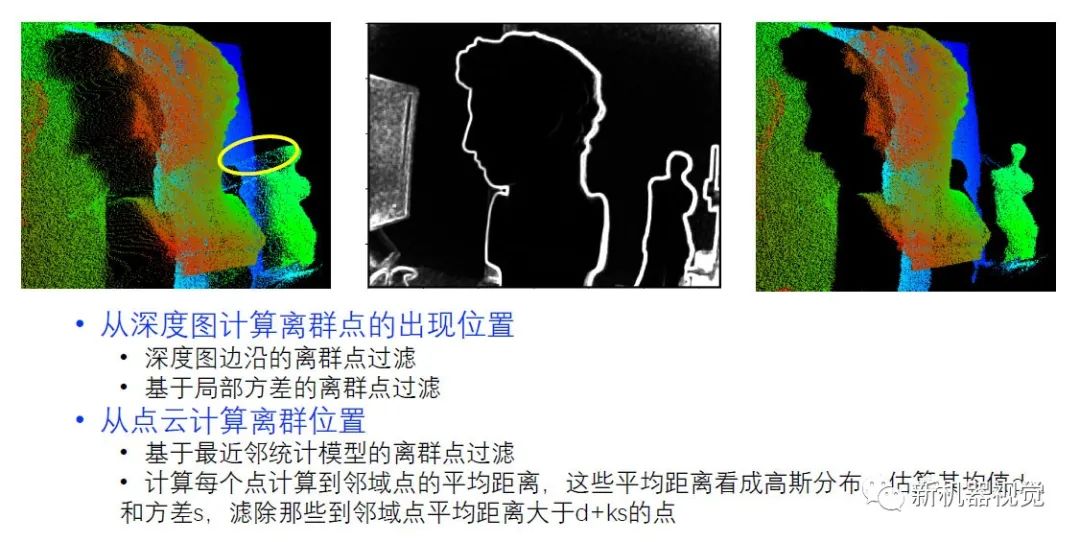
几何测量与建模
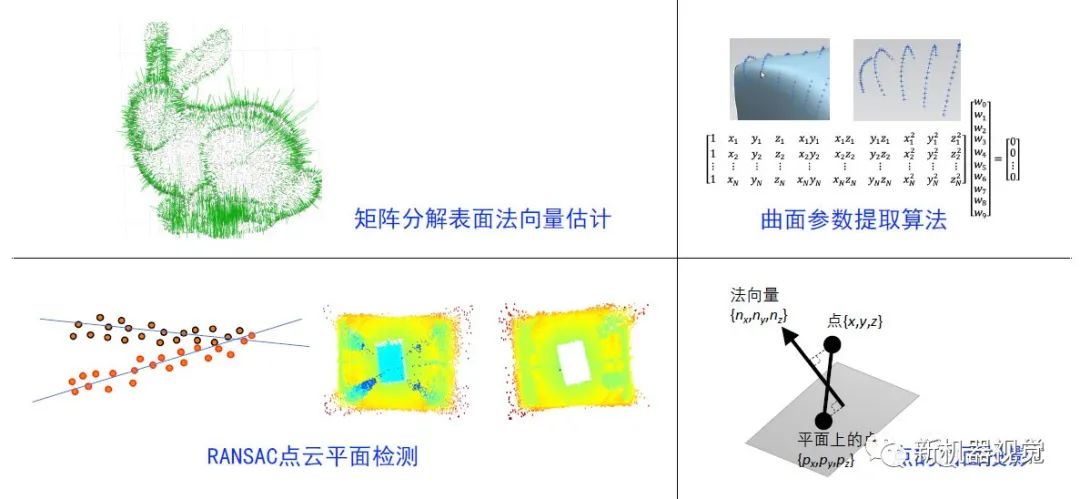
几何测量——表面法向量估计

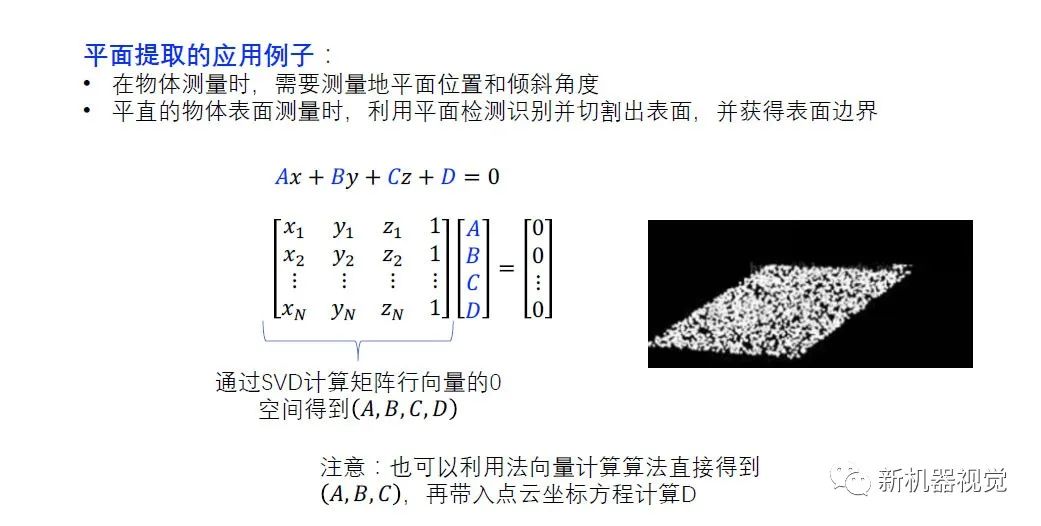
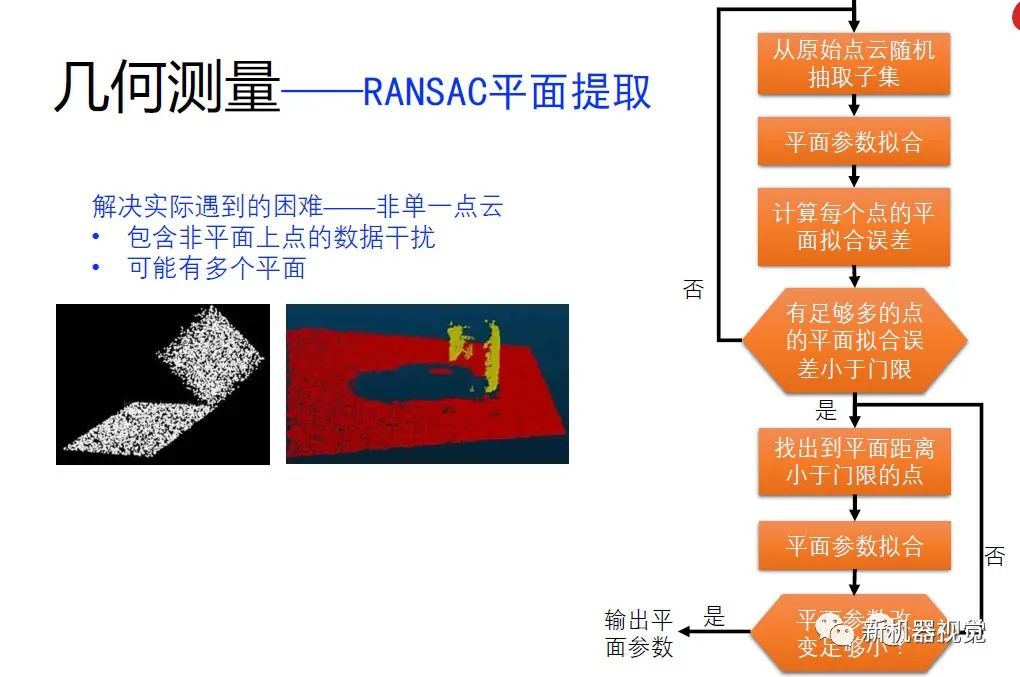
几何测量——平面提取
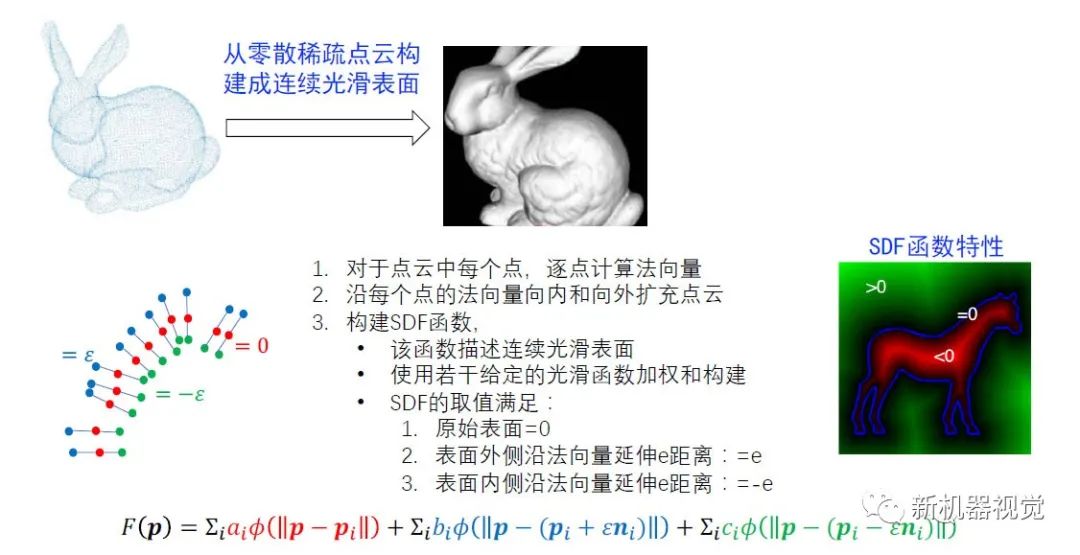
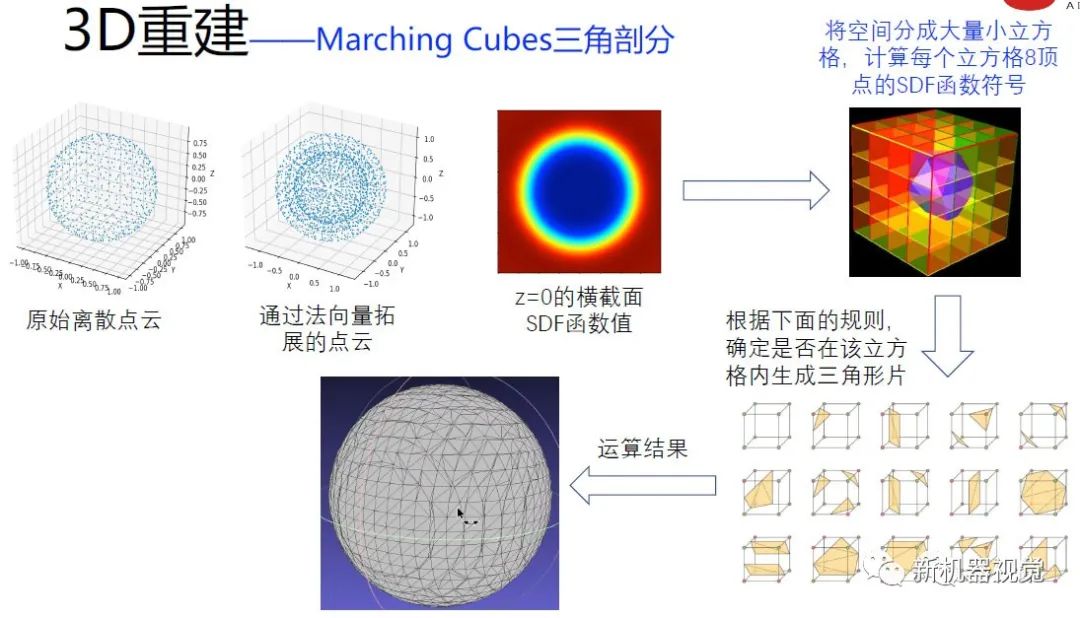
3D重建——从离散点云得到光滑曲面

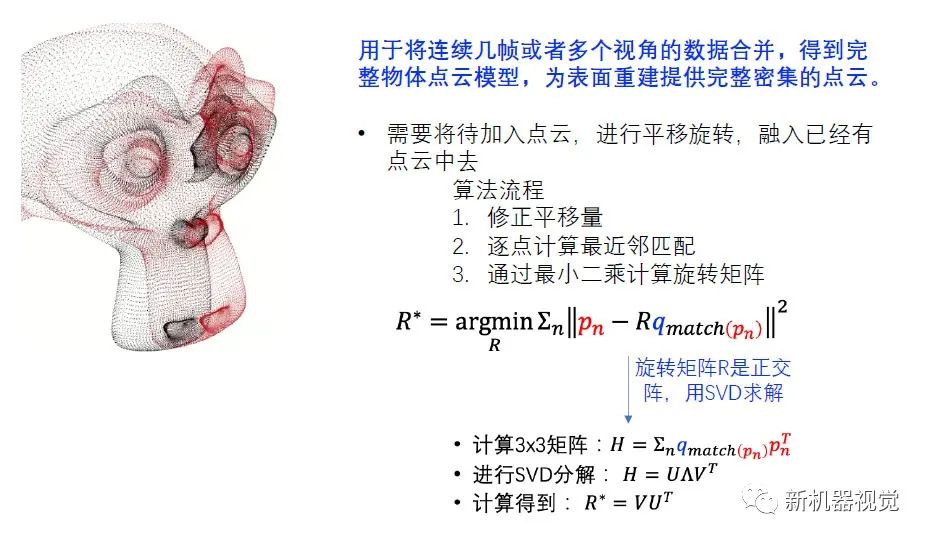
3D重建——ICP点云配准
3D重建——SDF表面重建
应用例子:从稀疏的点云中,构造出可以3D打印的模型
3D物体分割、识别与测量

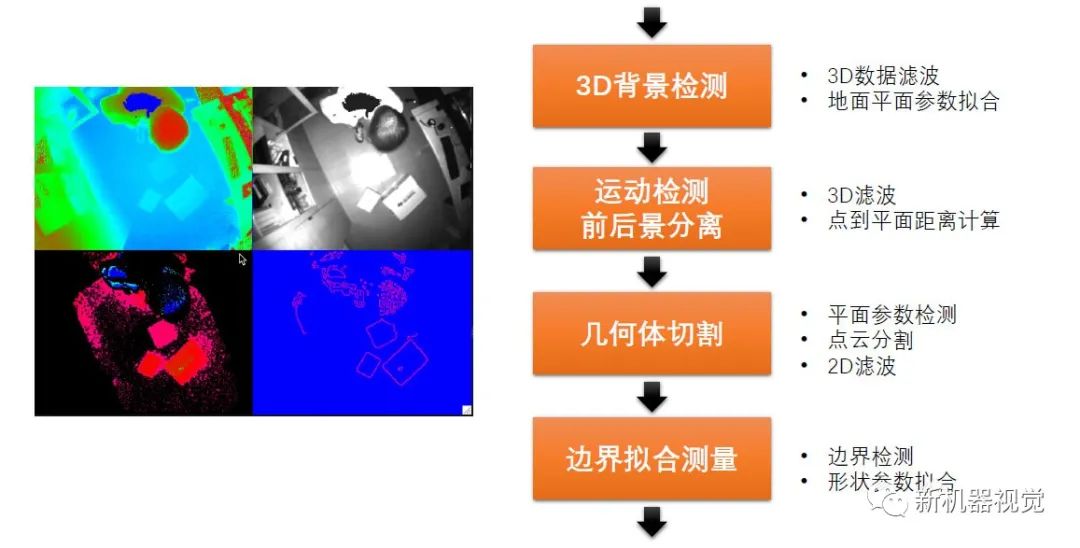
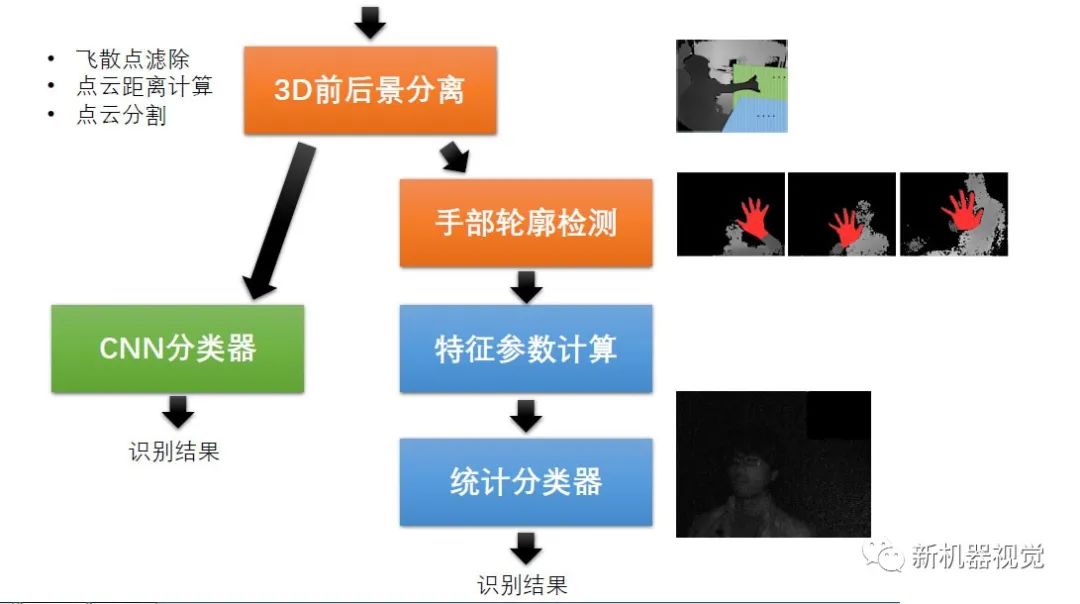
应用算法流程——3D物体分割、识别与测量
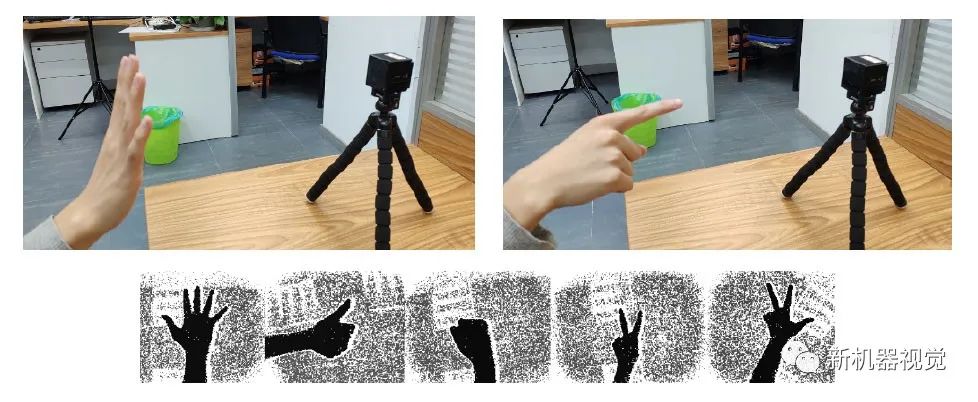
应用算法流程——静态手势识别
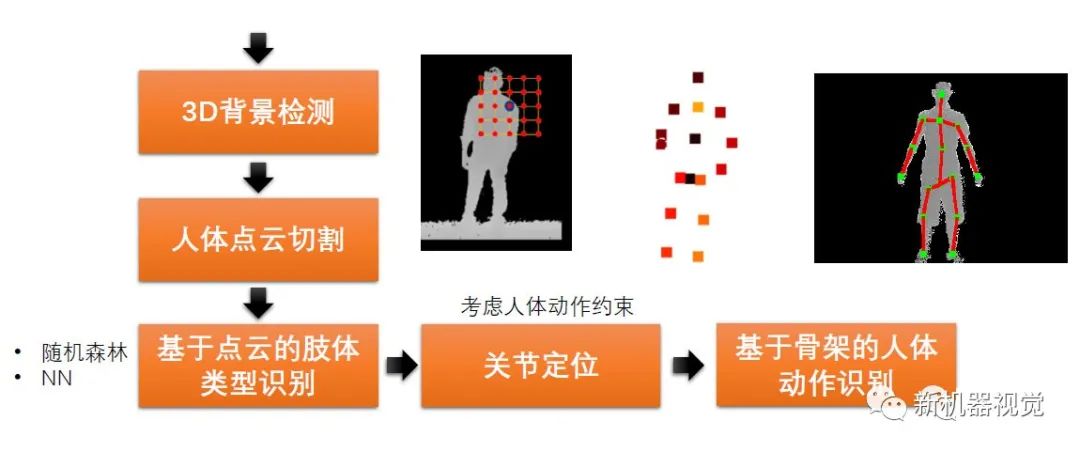
应用算法流程——人体动作识别
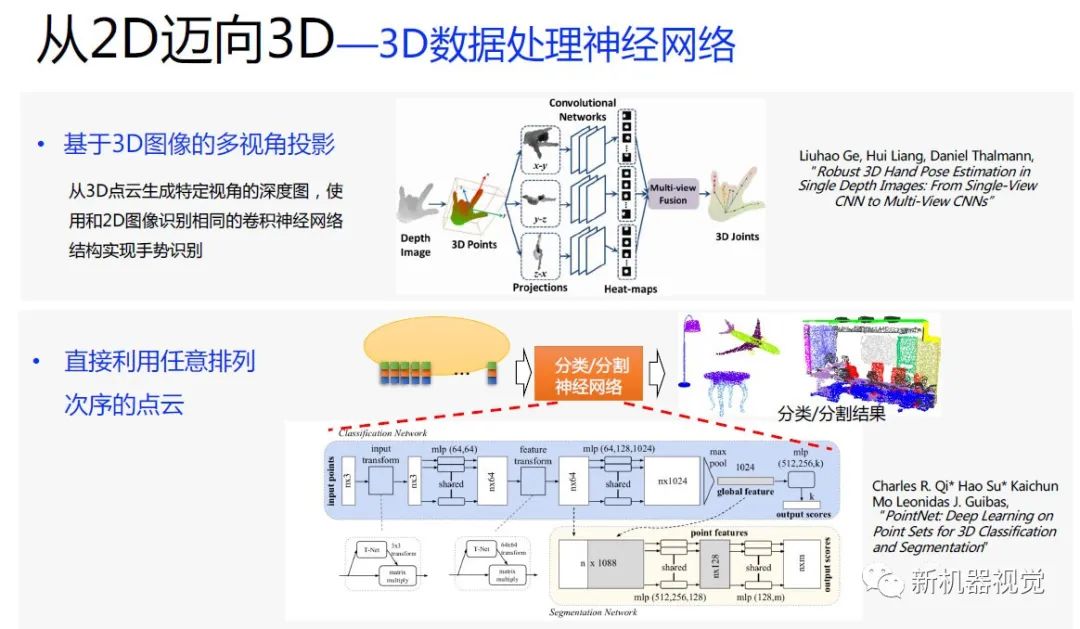
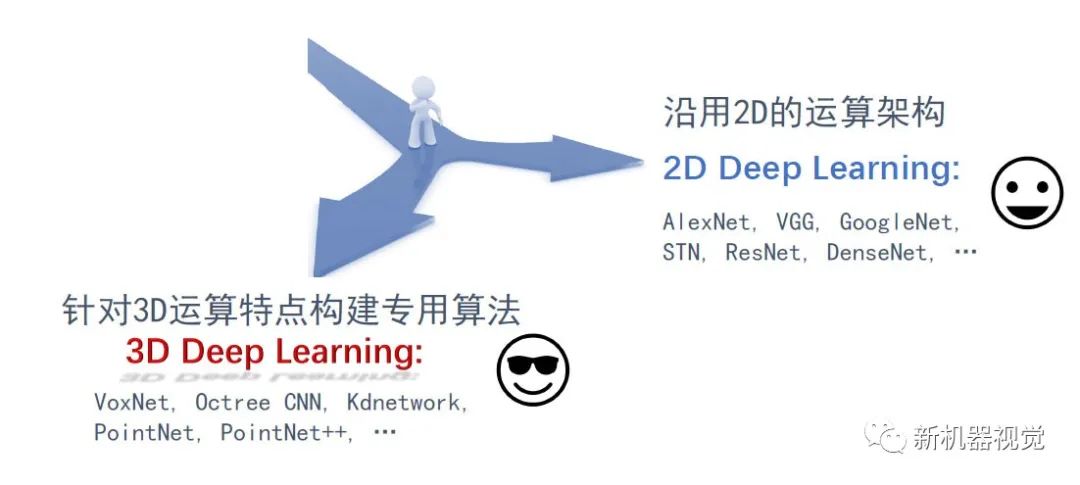
基于神经网络的3D识别——两个路线方向
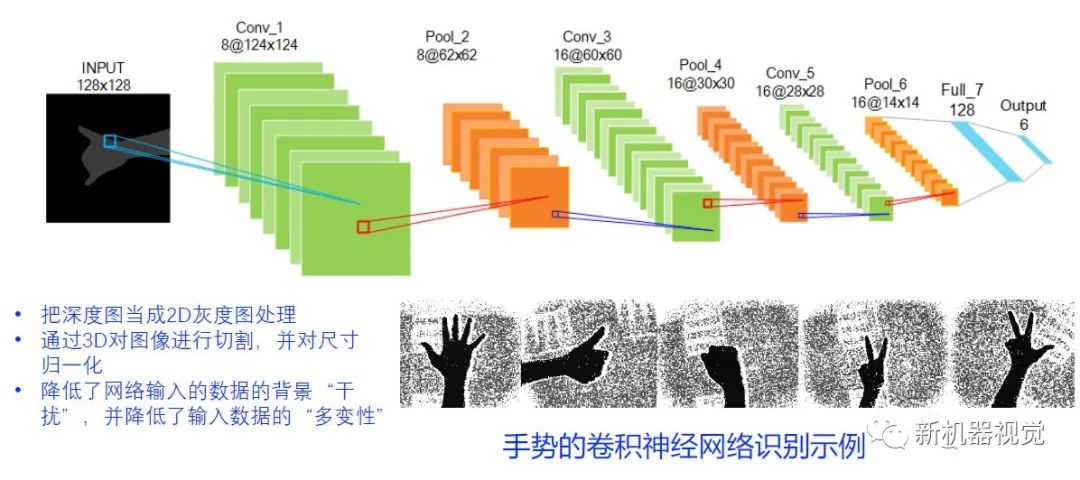
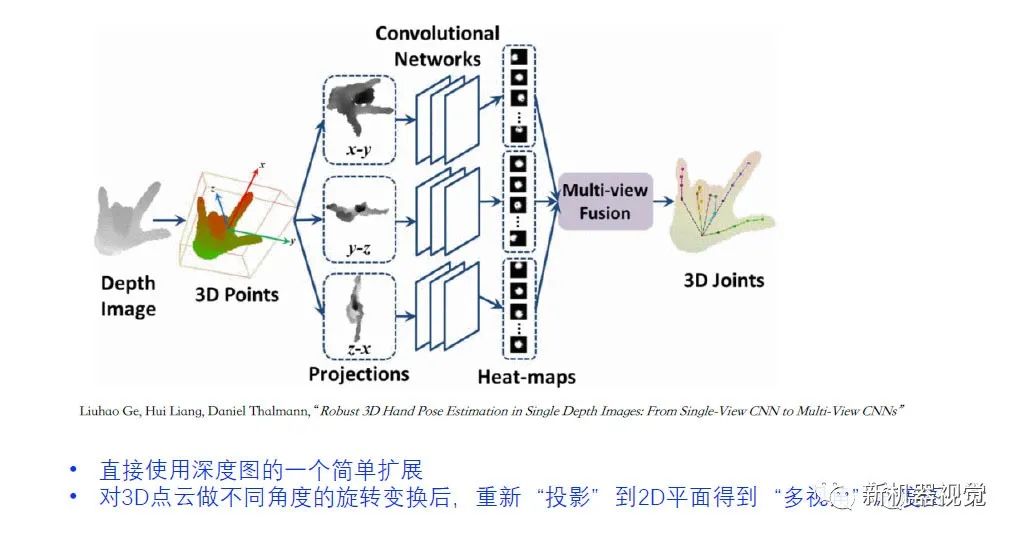
基于神经网络的3D识别——深度图作为2D灰度图使用
基于神经网络的3D识别——多视角深度图神经网络
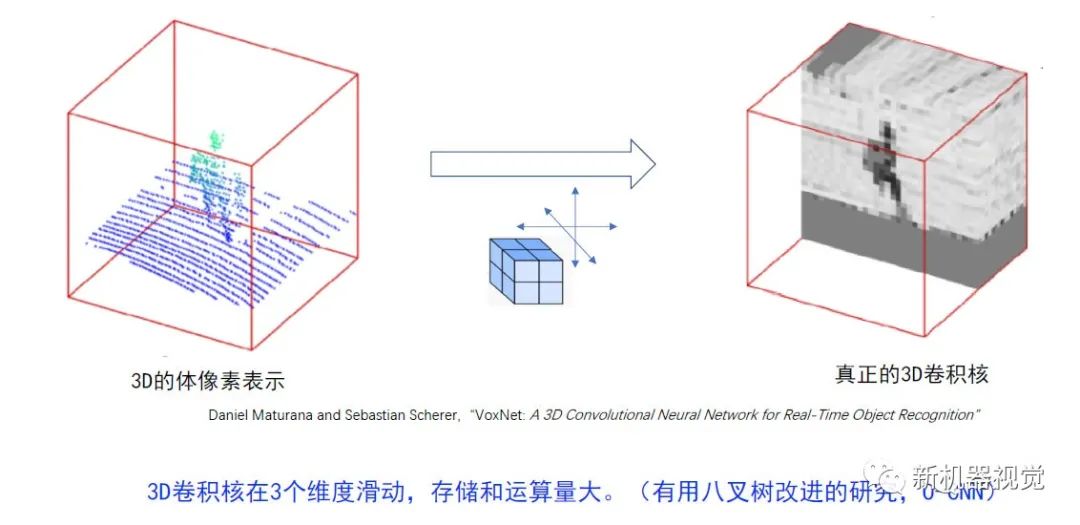
基于神经网络的3D识别——体像素3D卷积
基于神经网络的3D识别——点云神经网络

图卷积与神经网络
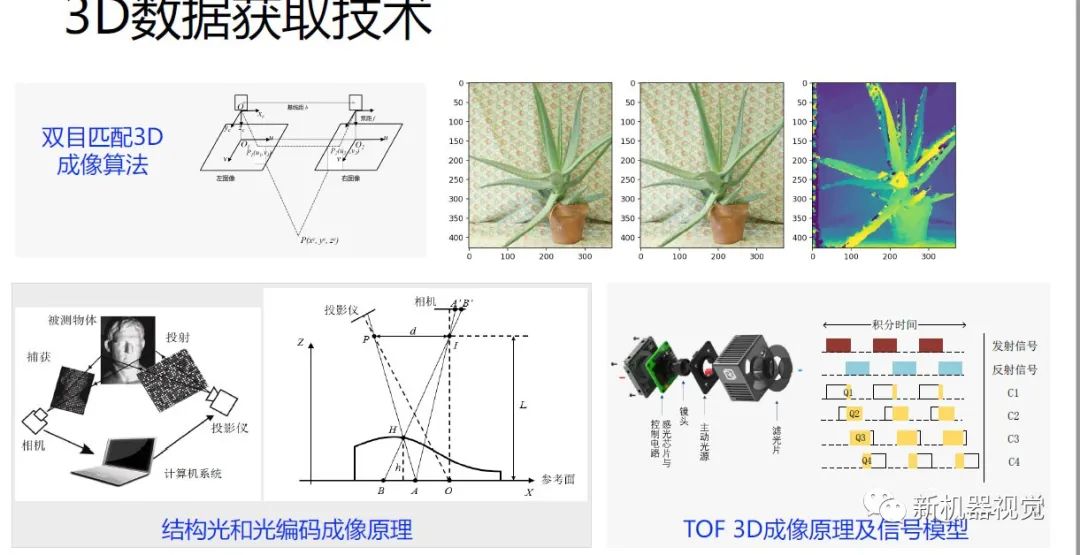
• 3D传感器
不同技术的特点比较和典型应用
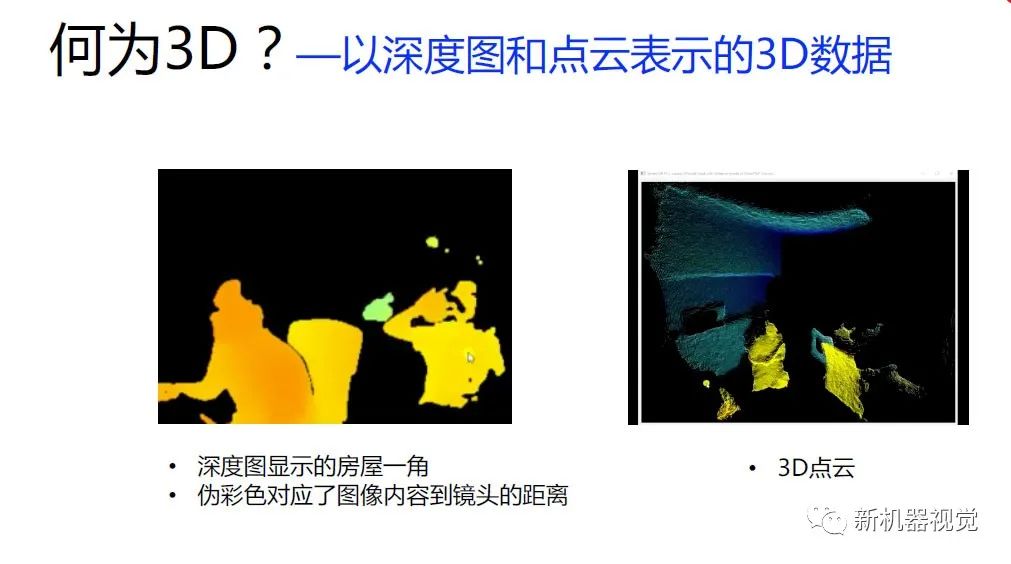
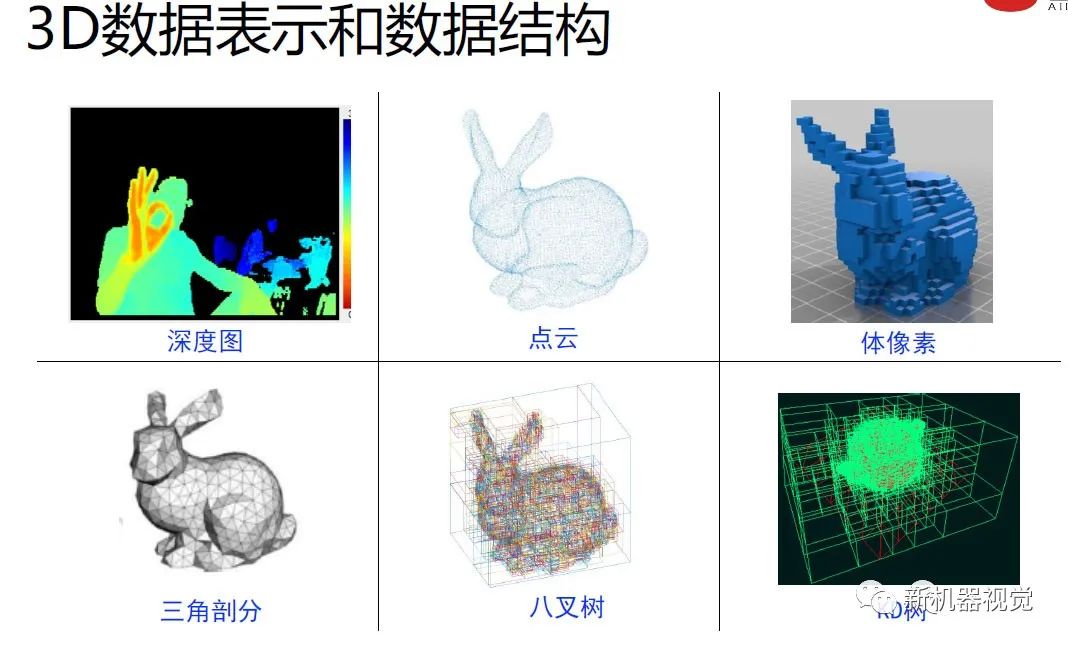
• 3D数据表示方法
多种3D数据的表示方法以及相互转换算法
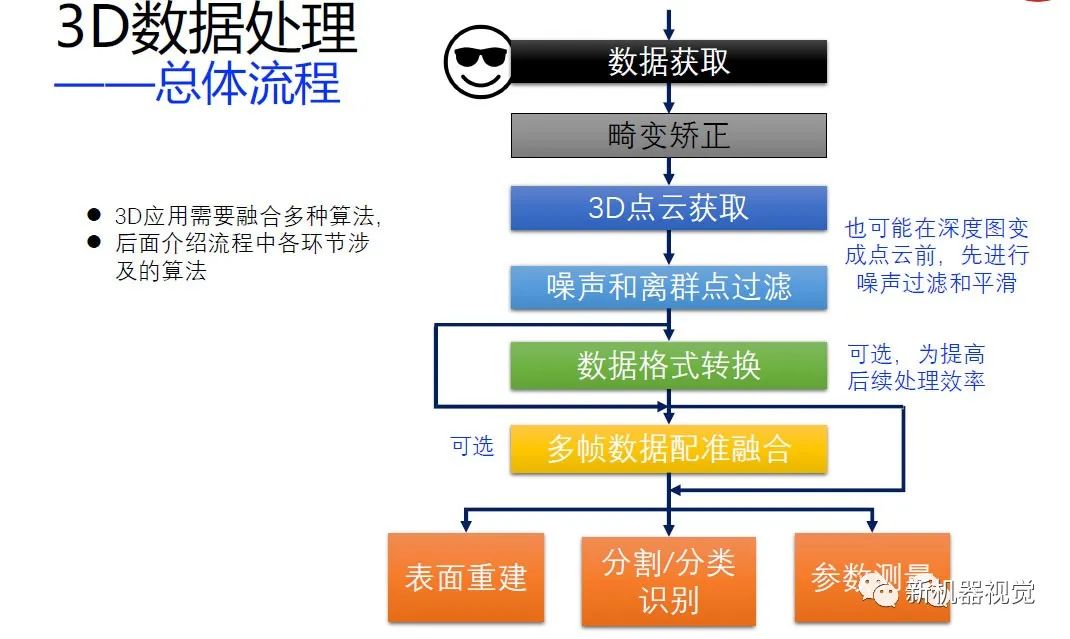
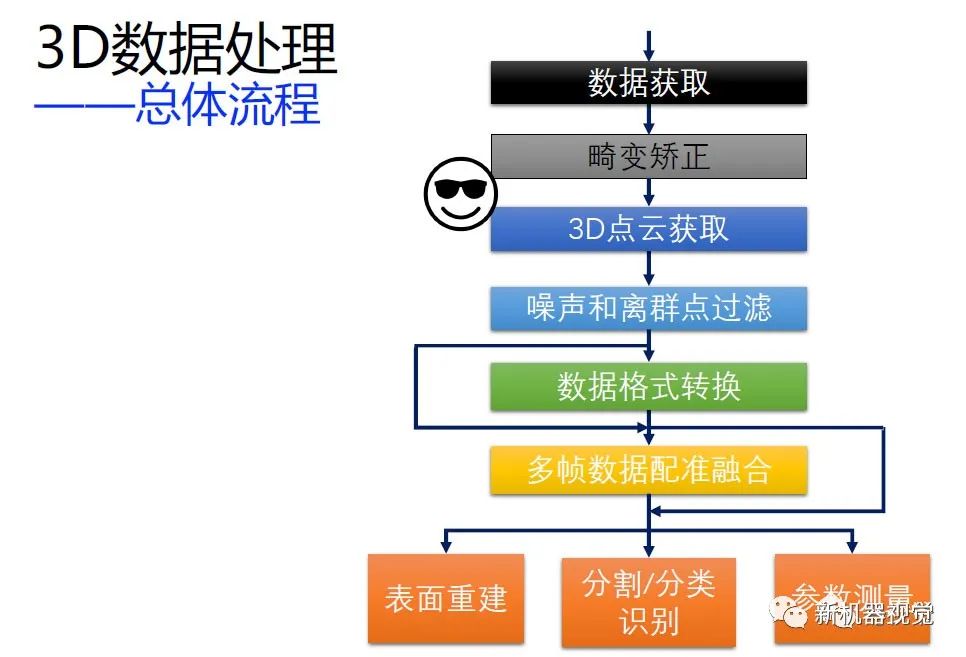
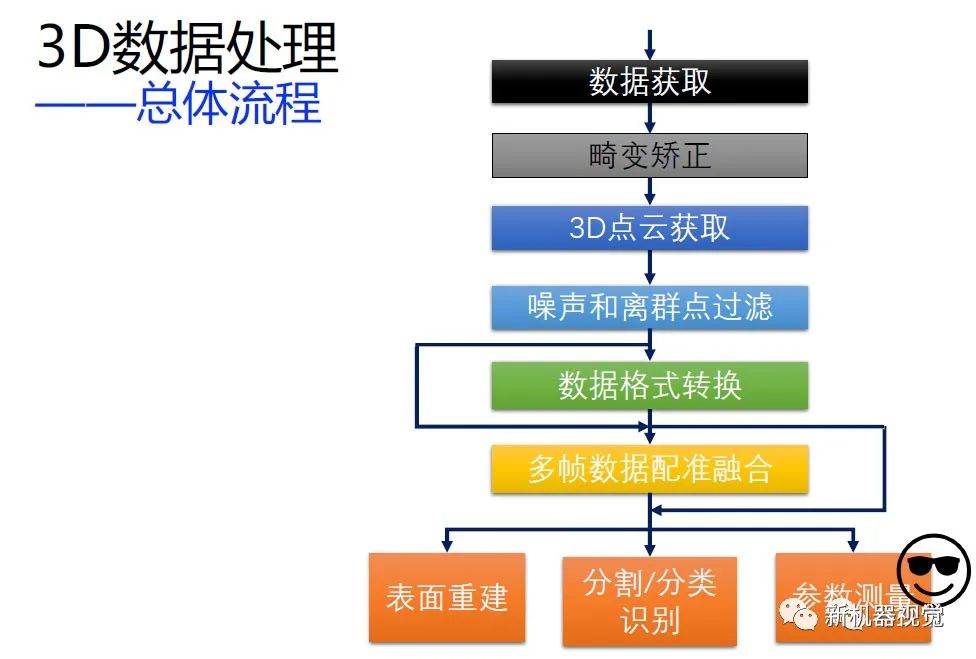
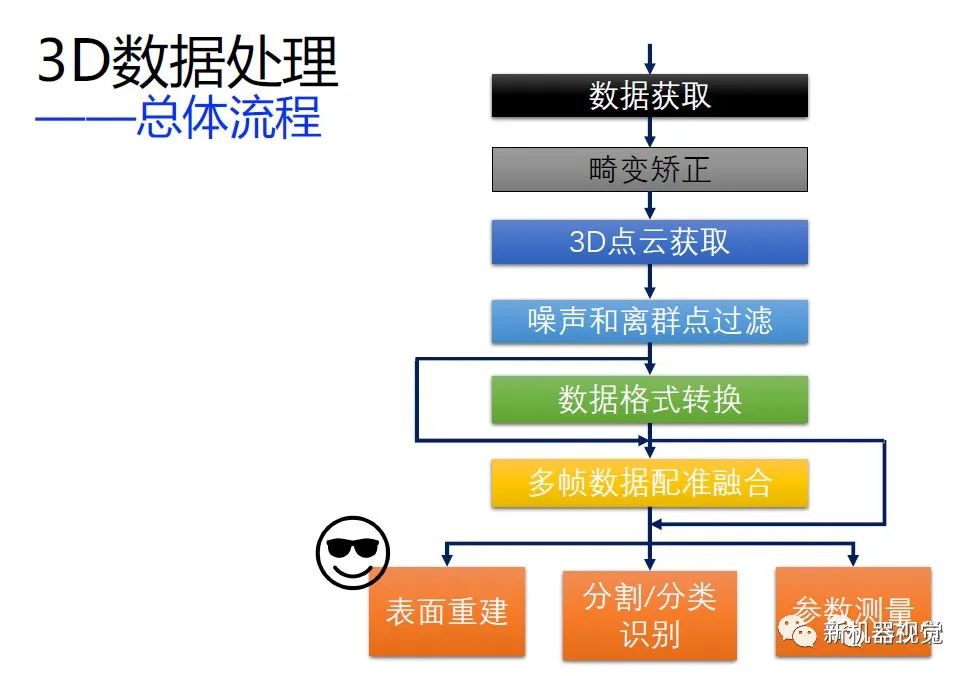
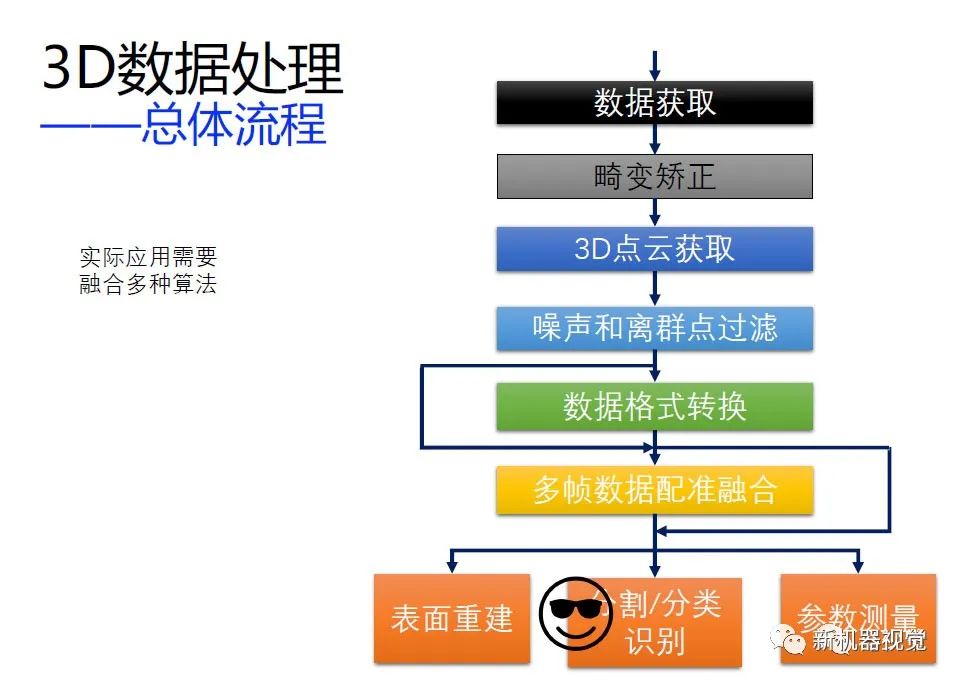
• 3D数据处理
分析实际的3D传感器数据特性,并介绍不同的处理算法
• 3D几何测量与建模
从3D数据中提取几何参数,用于物体测量和分析
• 3D物体分割与识别
静态物体的特征提取和统计分析,利用特征数据实现3D对象的识别和分割
• 3D活体检测与动作识别
生物特征提取和识别应用
• 高级算法和数据处理
基于3D数据的机器学习算法以及更复杂的底层数据处理算法介绍
3D测量
• 将提供的深度图数据转换成3D点云,识别其中的立方体并测量尺寸信息。所处理的数据包括静态几何体测量和运动物体测量。需要通过使用学到的3D数据处理算法解决实际数据中的噪声、图像畸变等问题

几何体识别
• 从提供的深度图数据识别特定视角或者不同视角下的不同类型的几何体,并实现3D点云分割
基于深度图数据的手势识别
• 使用提供的深度图数据,通过3D特征提取,实现手势识别算法,识别出指定的静态和动态手势
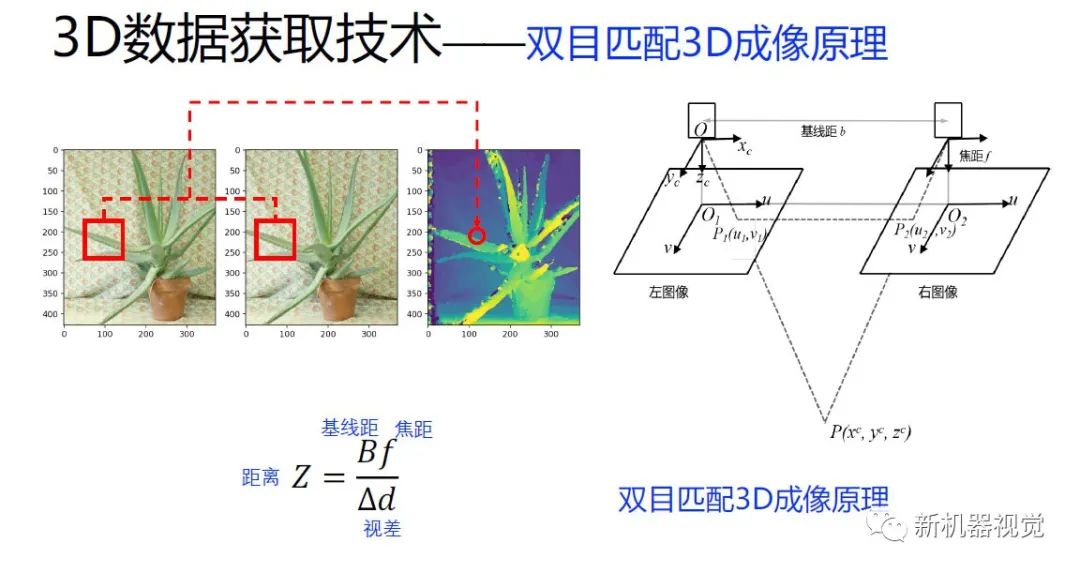
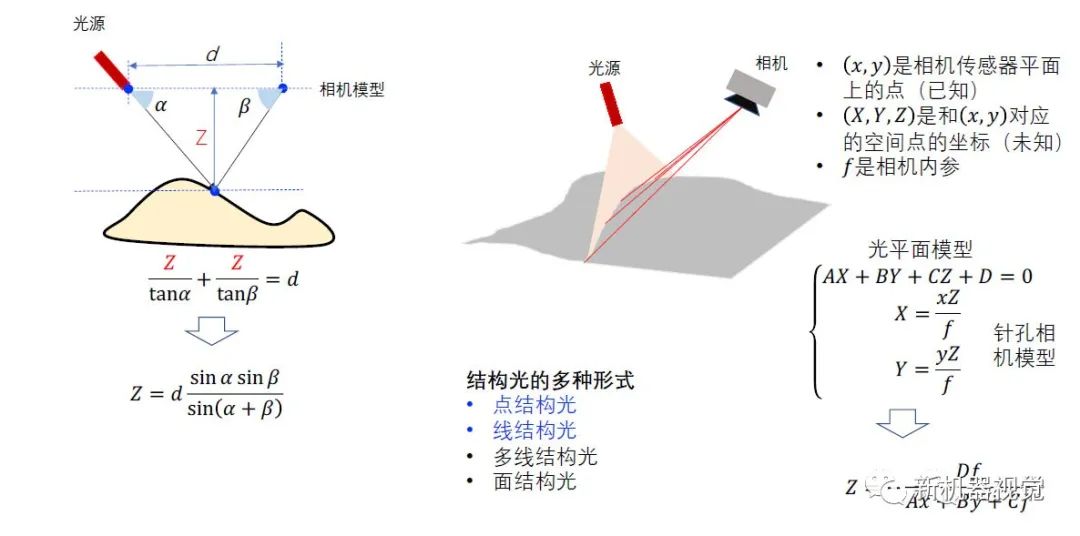
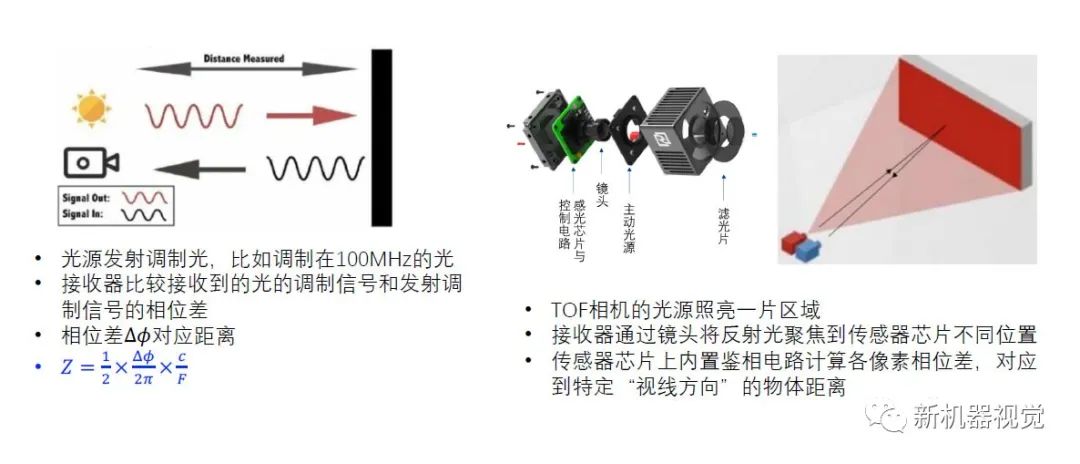
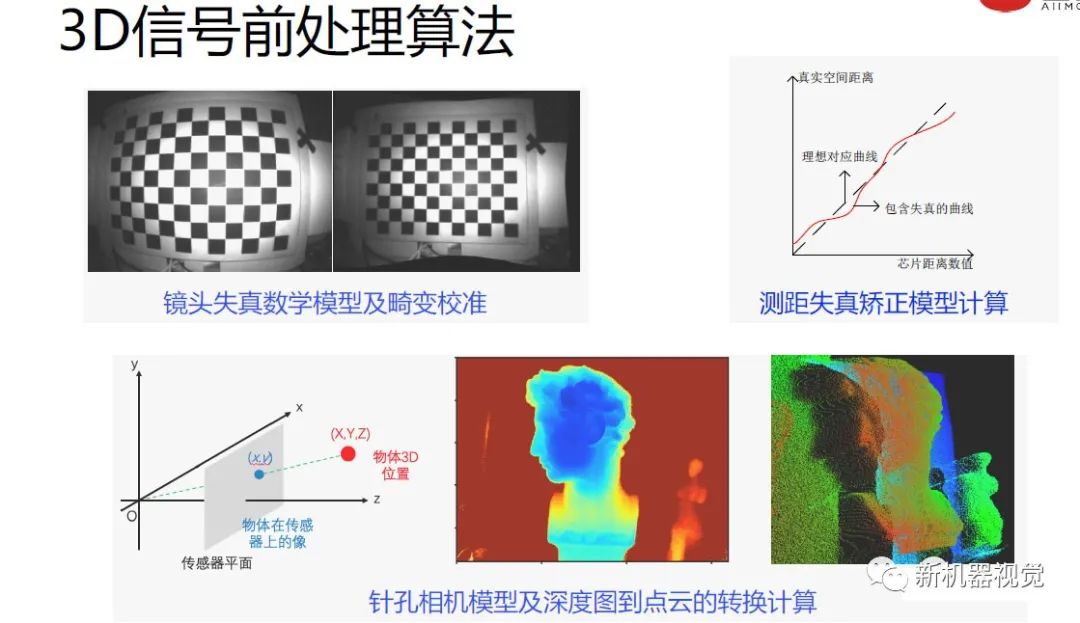
• 了解ToF深度相机、结构光深度相机、RGB双目等多种3D传感器原理
• 掌握深度图、点云、体像素、kd树、三角剖分等不同3D数据的表示方法和数据构建算法
• 掌握3D数据处理算法,包括坐标变换、滤波和过滤、检索匹配
• 掌握常用的3D数据的参数计算和体征提取算法,包括平面、直线、曲线、曲面、立方体等3D物体尺寸和位姿参数估计
• 了解3D物体识别、场景分割算法,人体动作识别算法,包括基于统计参数的识别算法和基于神经网络的分析算法。

 End
End
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~