
轻舟智航发布Driven-by-QCraft第三代自动驾驶硬件方案
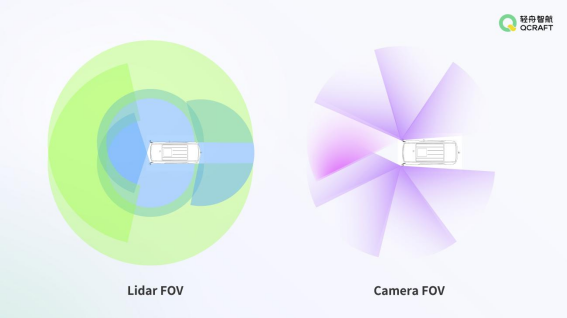
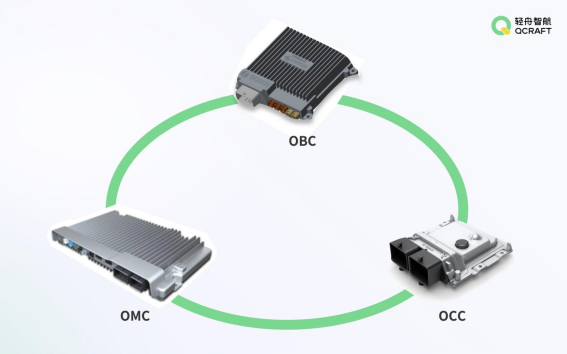
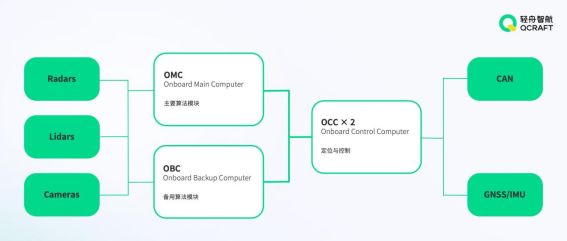
如何保证L4级自动驾驶系统的普适性,同时找到自动驾驶车辆成本、规模化之间的平衡点?近日,此前已经在自动驾驶网约巴士(Robobus)领域打出声量的轻舟智航推出了全新的Driven-by-QCraft第三代L4级自动驾驶硬件方案,在适配多种车型的同时,做到了高效与场景通用。其中传感器套件结合了多类先进高精度传感器的特点,实现了360度无盲区感知,具备极强的稳定性和实时性。同时在传感器、计算平台、电源、通信等模块均采用全冗余设计。
在NVIDIA GTC大会上,他们又宣布牵手英伟达,在Driven-by-QCraft硬件方案中率先使用英伟达的DRIVE Orin芯片,让L4级自动驾驶的计算平台迈向量产车规级,这也意味着轻舟智航成为首个使用NVIDIA DRIVE Orin的L4级自动驾驶通用方案公司。
同一方案支撑十款车型、十座城市、多个场景

以安全为红线

以规模化为目标

如果觉得有用,就请分享到朋友圈吧!
公众号后台回复“88”获取严彬:STARK-
基于时空Transformer的视觉目标跟踪PPT下载

# CV内推社群邀请函 #

备注:备注:姓名-学校/公司-内推(小极-极视角-内推)
即可申请加入极市内推技术交流群,获得最新大厂内推和面经干货
每月大咖直播分享、真实项目需求对接、求职内推、算法竞赛、干货资讯汇总、与 10000+来自港科大、北大、清华、中科院、CMU、腾讯、百度等名校名企视觉开发者互动交流~
评论