你的神经网络会忘了学到的东西?
极市导读
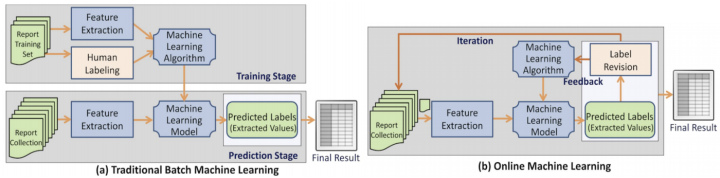
本文主要介绍了正则化、重播、提醒、双层持续学习等4种可用于对抗神经网络灾难性遗忘问题的策略,并提出了一个新的研究方向——在更真实的流场景下,训练实例流有可变分布的在线学习。>>加入极市CV技术交流群,走在计算机视觉的最前沿

什么是灾难性遗忘(Catastrophic Forgetting)?

记忆的策略
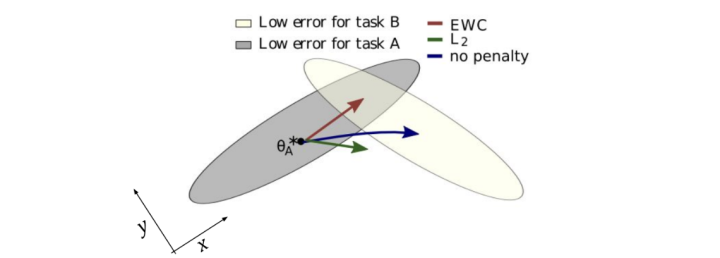
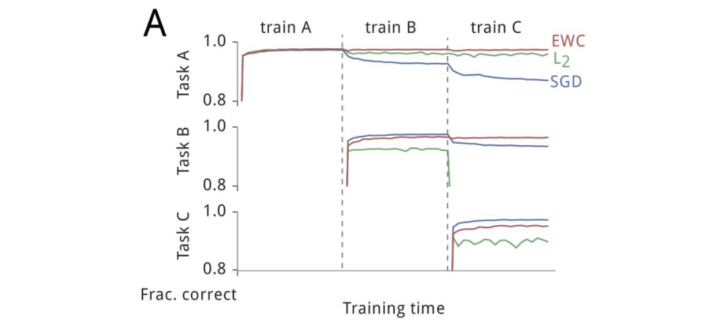
正则化(Regularization)
总结
推荐阅读
评论
 下载APP
下载APP极市导读
本文主要介绍了正则化、重播、提醒、双层持续学习等4种可用于对抗神经网络灾难性遗忘问题的策略,并提出了一个新的研究方向——在更真实的流场景下,训练实例流有可变分布的在线学习。>>加入极市CV技术交流群,走在计算机视觉的最前沿
推荐阅读