
实践教程 | 在yolov5上验证一些不成熟的想法
点击上方“程序员大白”,选择“星标”公众号
重磅干货,第一时间送达


极市导读
作者说最近没有业务压力,于是做了两件事:一是把基于mxnet的训练代码迁移到pytorch上,二是在yolov5的代码基础上验证了一些关于目标检测的想法。关于第二点准备留篇文章做个记录(其实是把有道云笔记复制了一遍🐶),同时也希望有感兴趣的互相探讨一下
一、起因
在迁移mxnet训练代码的时候,很长一段时间结果都无法对齐,于是我不得不又重新认真的读了一下之前撸的mxnet代码,在看的过程中发现了很多之前留下来的备注。我都已经不记得是否有尝试过,索性就结合最近的一些思路,看看自己的一些想法是否科学。
二、分析
讨论不同的检测方法,核心点就是目标分配和loss函数的使用了。毕竟数据准备,网络结构,训练技巧等等大家都能用。所以先简单叙述一下我的认知,为后续做个铺垫。
1、目标分配
在传统方法中,我们一般使用图像金字塔+滑动窗口进行图像切分,然后使用传统的特征抽取方法进行分类。这个时候滑窗和目标达到一定的IOU我们就认定为正样本,低于某个值就是负样本,中间值直接舍去。

在基于anchor的方法中,我们一般使用密集铺设的anchor和目标计算IOU,大于某个值作为正样本,小于某个值为负,中间值舍去。这时候就跳出了一些略微特殊的方法,比如yolo计算的是wh的IOU,然后忽略样本是预测结果和标签的IOU大于某个值(正样本不改变,只改负样本)。

在anchor free的方法中(或者很多方法可以称为point anchor),我们可以使用高斯核,可以使用固定范围,可以自适应等等来区分正负样本。
端到端的方法目前我认为还不是很成熟,也就不说了。
2、损失函数
损失函数其实单独拿出来说不是特别科学,因为损失函数需要和具体的样本划分以及标签设置有关系。比较常见的就是交叉熵,l1 ,l2,soomth l1,focal家族等等。
三、尝试
我这次所有的尝试都是基于修改版本的yolov5代码。原版的yolov5正负样本采用wh和anchor的比例最大值来决定。在可视化训练标签和样本后发出几个疑问。
1)样本的划分是否合理?
首先看几个示例
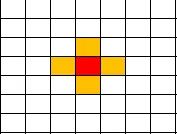

红色表示目标中心在特征图上的位置,每次都会取,也是yolo前几代的正样本点。橙色点是yolov5新增加的,每次会从4个橙色点中取出两个相邻的结果,如示例。
现在考虑一些问题:
1、橙色点的贡献应该是均等的吗?例如x=3.51和x=3.99,在取值的时候都会取x=3,4这两个点。当目标比较大的时候贡献均等与否影响不大,但是目标较小的时候是否也能均等贡献?
2、不同大小的目标都只取3个点吗?按照yolov5的设置,在同一层上的目标,最大的比例宽度为16倍。简单解释一下,例如Anchor的w为8,设置的比例阈值为4,那么最小的w为2,最大的w为32。当我们在同一层上进行预测的时候,小目标可能跨度都不够2个网格,大目标跨度是小目标的数倍。那我们都取同样的正样本点,甚至正样本点都不在目标范围内,这是否合适?
3、除去正样本就是负样本这样合适吗?还是刚刚的例子x=3.51时,我们认为3,4为正样本点,2为负样本点。但实际上2,4到中心的差距只差0.02 他们的贡献就应该一正一负吗?
4、直接按照宽高比例取,导致某些点被重复使用这样影响大吗?我们在取点的时候不会判断是否被之前的目标使用,而是按照标签去直接取点运算。这就会导致某些点被多次使用,尤其是目标比较密集的时候。这点在和yolov5的作者讨论的时候也说到了,后面会有当时讨论的修改方案和结果。
5、如果我们选择的Anchor不合理,就会导致某些目标同时出现在所有Anchor或者说所有预测层上,这样强制学习是否可靠?
6、某些标签会被漏掉,例如宽高比例差距很大的数据。漏掉的如何补充进训练数据?
再看一个yolov5训练的特征可视化结果:

从特征可视化结果来看,整体倾向于标签选择方式,类似直角三角形的直角边为高可信度区域。但这就有个问题靠近直角边中间的区域,以及反向区域,就应该是低置信度吗?
pytorch 特征可视化:https://zhuanlan.zhihu.com/p/388435039
2)尝试修正不合理
1、关于不同点的贡献是否均等的问题,尝试使用距离比例来解决,选定的正样本点,以到实际目标中心点的距离来决定正样本指数的比例,如x=3.51和x=3.99则比例分别为0.51和0.99;当x=3.49和x=3.01时比例为0.51和0.99(注意这里是取的3,2了,不是3,4)。
2、针对不同目标大小使用fcos中的方式,设置一个范围然后取半径内的点。这样就会出现某些目标只会有中心一个点,有的目标可能有半径3范围内的16个点。
3、直接非正即负的方式替换为预测值和真实标签大于某个值得时候,ignore掉负样本。
4、重复点采用两种方式解决,第一种是直接暴力去重使用torch.unique加上一堆操作来实现,第二种是根据预测结果的iou,选择高iou的结果。
5、合理设置Anchor,相邻层的Anchor比例设置为宽高阈值以上。
6、学习前几代yolo的操作,强制把漏掉的样本加入训练中。
3)看上去无关的尝试
1、别人说好用的loss,都拿来试一下,比如GFL这种神器,比如VFL这种不知名的武器,比如OHEM操作等等。
2、Anchor的数量和值,是否真的影响非常大。
3、各种超参数的组合拳。
4)尝试的结果
1、超参数的调整基本没有意义,影响较大的是影响loss比例的参数,这个需要确保yolov5的box loss和obj loss最终的比例大致在1:2左右,这样会收敛到比较好的结果。
2、Anchor选择
- [192,240, 384,480, 512,640] # P5/32
- [48,60, 96,120, 144,180] # P4/16
- [12,15, 24,30, 36,45] # P3/8
- [192,240] # P5/32
- [48,60] # P4/16
- [12,15] # P3/8
这两组Anchor跑出来的训练结果基本是一致的,可以看到Anchor选择正好是宽高阈值界限,所以合理设置Anchor的大小是重要的,Anchor数量就影响较小。
3、花里胡哨的样本选择方式,需要配合loss的调整才能使用,如果只是直接修改样本信息,结果可能会不如原版本。
4、同上一条,直接修改loss函数也不一定适用,例如focal类似的操作,强调难易样本的不均等对待,这时候因为yolov5的非正即负的样本选择方式,就会导致使用focal的时候模型进入迷惑状态,最终性能会下降。
5、不同样本位置和宽高,进行加权以及范围选择。有效但是影响比较小。
6、对原始yolov5中的重复取点进行去除操作,几乎没有影响,我的理解是作者的操作会导致样本数量非常多,例如一个样本可能生成27个采样点,就算有一部分被重复使用,影响也不大。
7、GFL这类操作是有意义的,就算你不配合修改样本划分策略。使用这类方法也能稳定提升结果,尤其是小目标性能,VFL在小目标和难例上的表现又比GFL好一些。
四、总结
拿经典的人脸检测任务梭哈了一把,怼上各种合理的,不合理的操作之后。我们的网络性能较之前在wider face hard上提升了5个点(这里是在yolov5原版的基础上提升的,但是可能和我用的是小模型,加上hard数据比较难导致的,不一定有代表意义)。模型大概就是一个朴实无华的mini vgg + fpn,没有反卷积,3个输出层,每个点输出一个Anchor,整体结构非常清新。在224X224分辨率下大概是150M的算力。如果替换为depth wise这类型的操作,理论算力下降会很明显,但是npu上会变慢,所以我们所有卷积都是普通卷积。

模型大概就是这种全普通卷积+fpn操作
关于白嫖和自己的想法:
1、既然是白嫖就老老实实的白嫖,不要期望自己在别人的基础上做出突出的改善。
2、漂亮的可视化结果或者一个好的故事,也许只能安慰一下自己空虚的心灵,并不一定提升模型的结果。
3、样本选择和loss选择是一个联动的过程。孤立任何一方去修改都可能事倍功半甚至是无用功。
4、大力很多时候能出奇迹,一些方法不是不适合,而是不适合你的训练参数或者模型结构。
五、不知道咋取名
在刚毕业的时候,我和我师傅两个就鼓捣出了现在非常流行的Anchor free检测器,和《centernet:objects as points》文章的思路比较相似。然鹅最终取没有在公司的主流任务中使用(被Rcnn系列打败了)。这也导致了我一直以来只会yolo这种套路的检测方案,不会ssd(强行找个借口)。
回想一下我们当时的做法:
a、将输入resize到两个分辨率上,一大一小。
b、梭哈图片得到两个特征图,然后按照特征图上目标的大小给予置信度标签,以及边框标签。
c、用同一个backbone分别训练两个固定分辨率的数据。
看一下当时我们没用上,但是有比较大的意义的技术:
a、fpn,特征金字塔,特征融合。
b、focal loss或者软化标签。
c、iou 感知替换置信度标签或者类似center ness这类。
看上去似乎修改不大,但都解决了一部分检测中比较核心的标签分配问题。
不同大小的目标怎么分;不同难度样本怎么分;边框和置信度训练使用割裂的问题。
现在回想起来,觉得自己思考还是太简单了,很多问题发现了但是并没有尝试找到合理的解决方案,所以一直这么菜鸡。
推荐阅读
关于程序员大白
程序员大白是一群哈工大,东北大学,西湖大学和上海交通大学的硕士博士运营维护的号,大家乐于分享高质量文章,喜欢总结知识,欢迎关注[程序员大白],大家一起学习进步!