
中秋福利!领取所有视频干货教程(自动驾驶+三维重建+点云处理+视觉/激光SLAM)
现有课程分为小专栏和大专栏系列,其中小专栏为单个系列课程,大专栏将领域相关所有课程汇总(SLAM全栈系列、三维重建全栈系列、3D视觉全栈系列)。以下是所有课程介绍(按方向划分、扫描8折优惠券码可进一步了解课程):
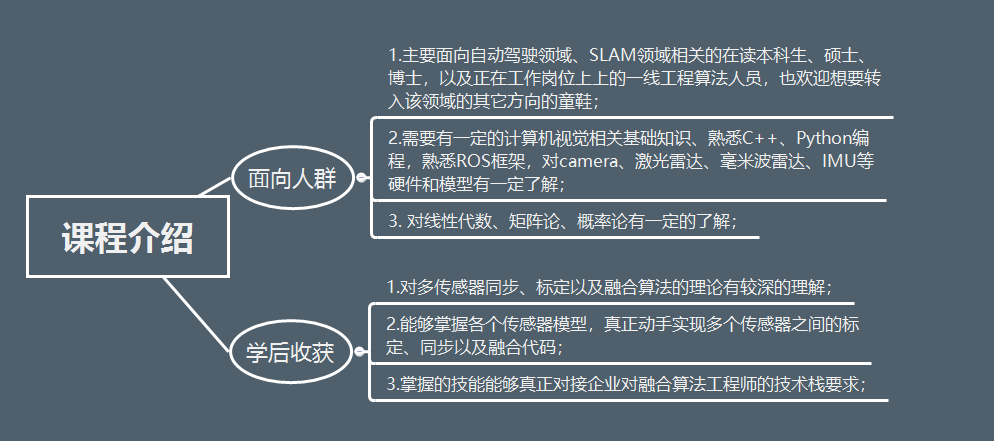
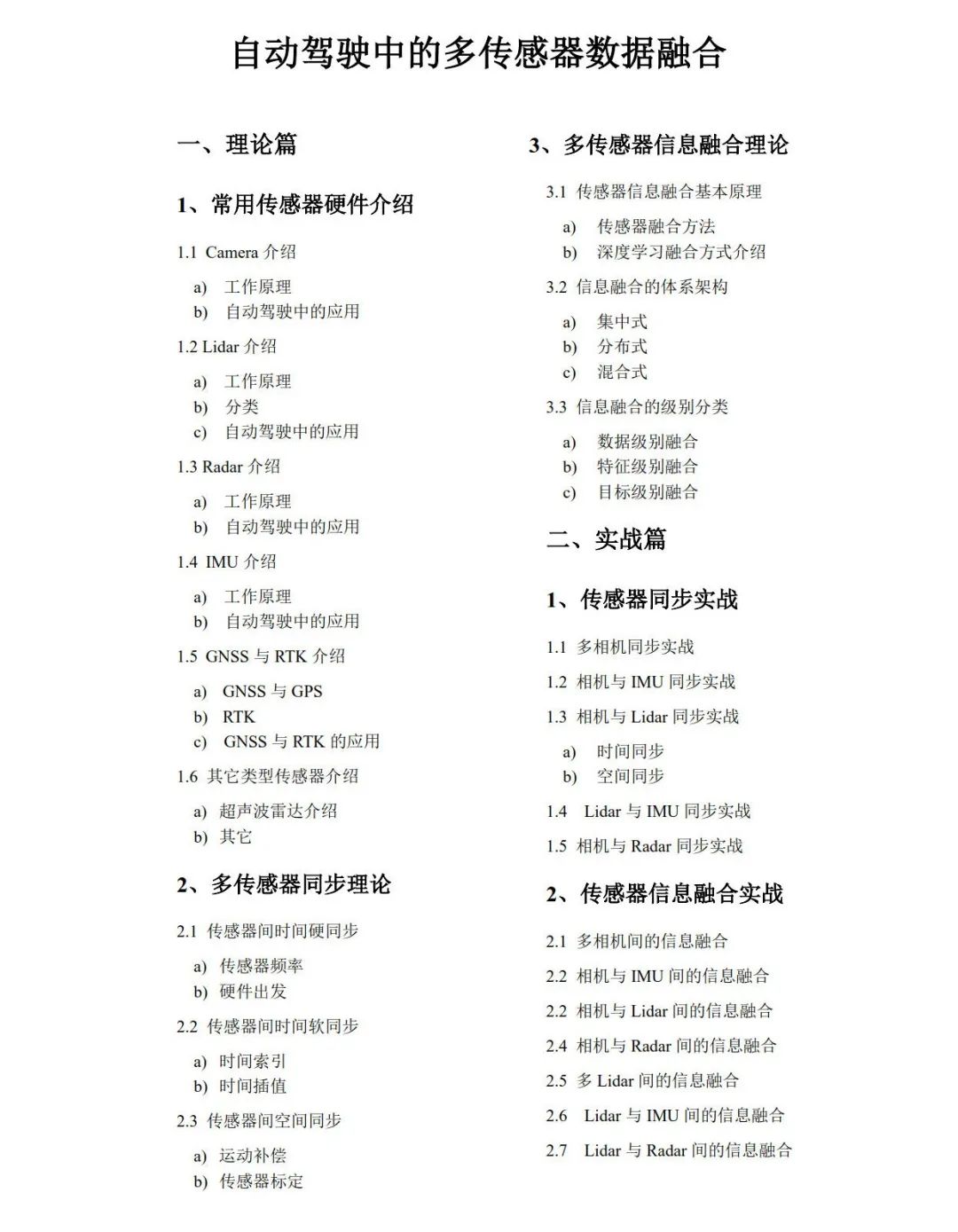
课程链接:国内首个面向自动驾驶领域的多传感器数据融合系统课程
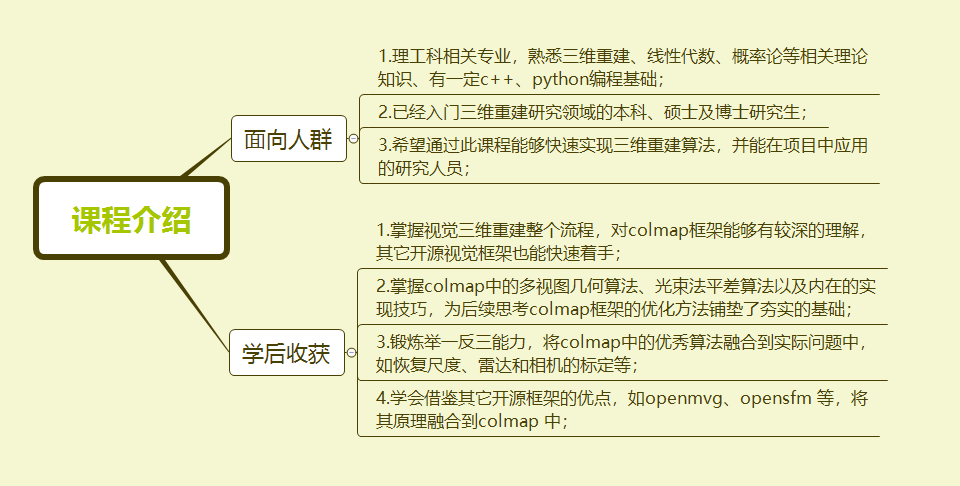
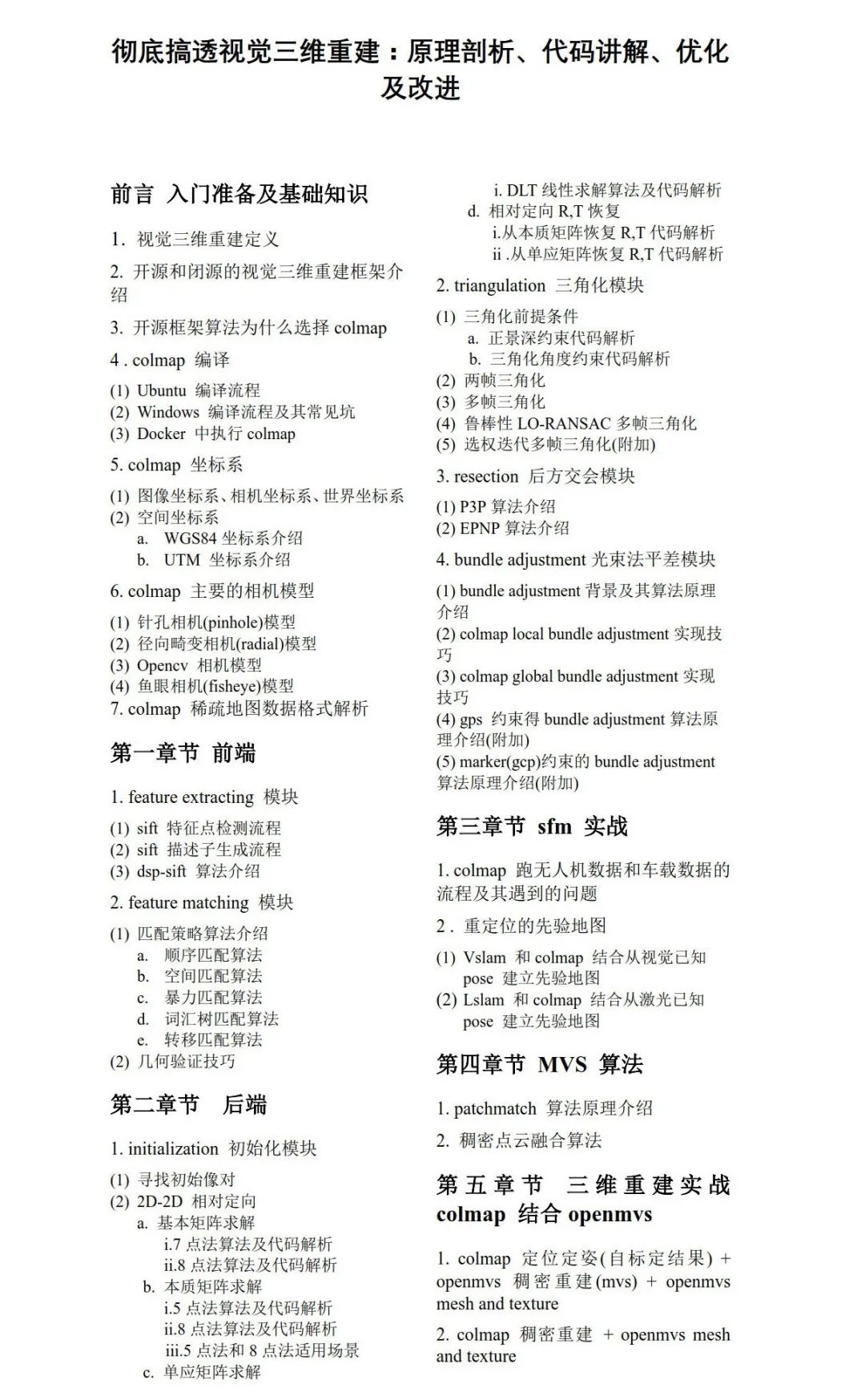
视觉三维重建
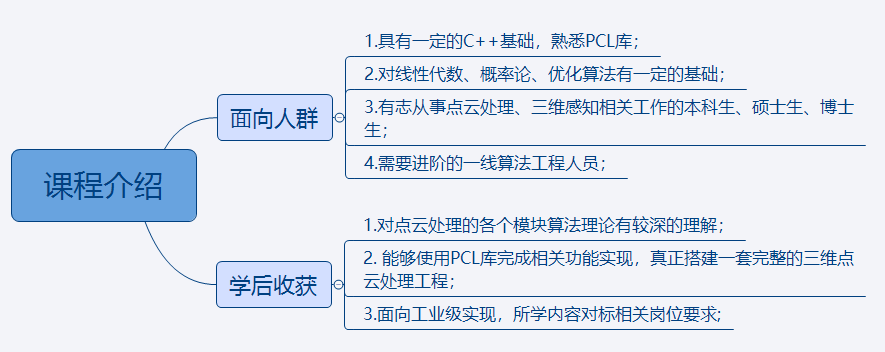
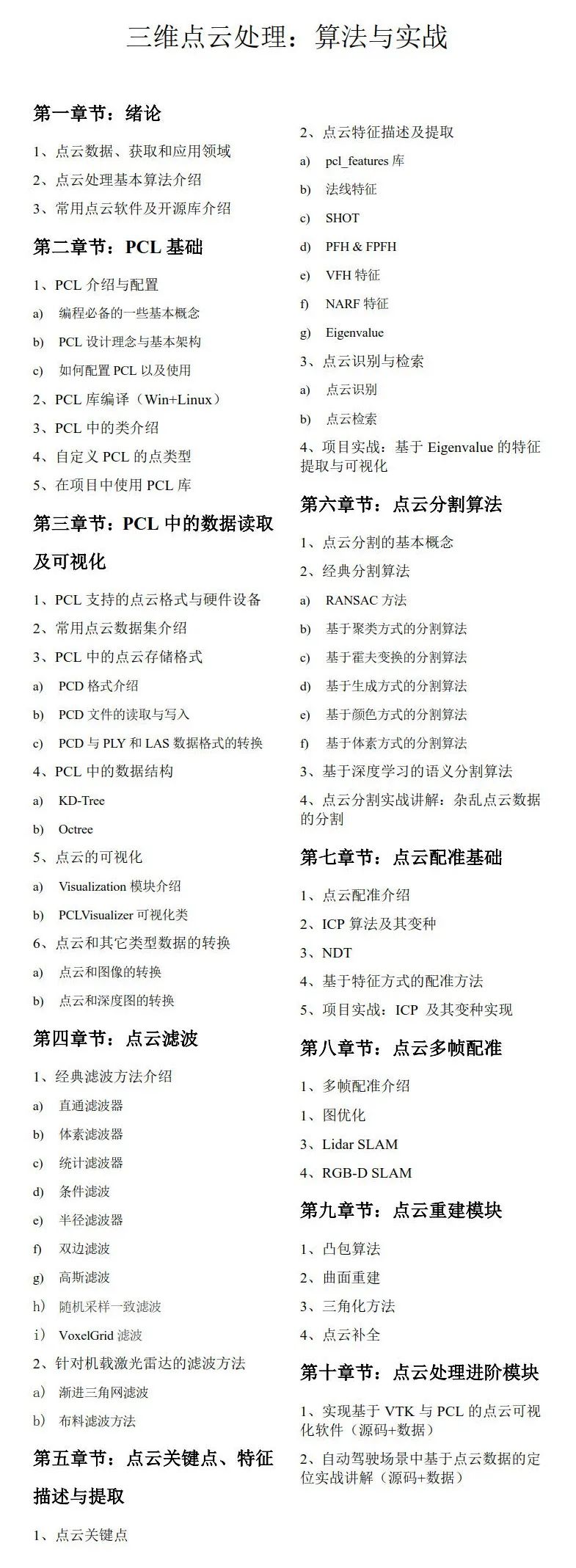
点云处理
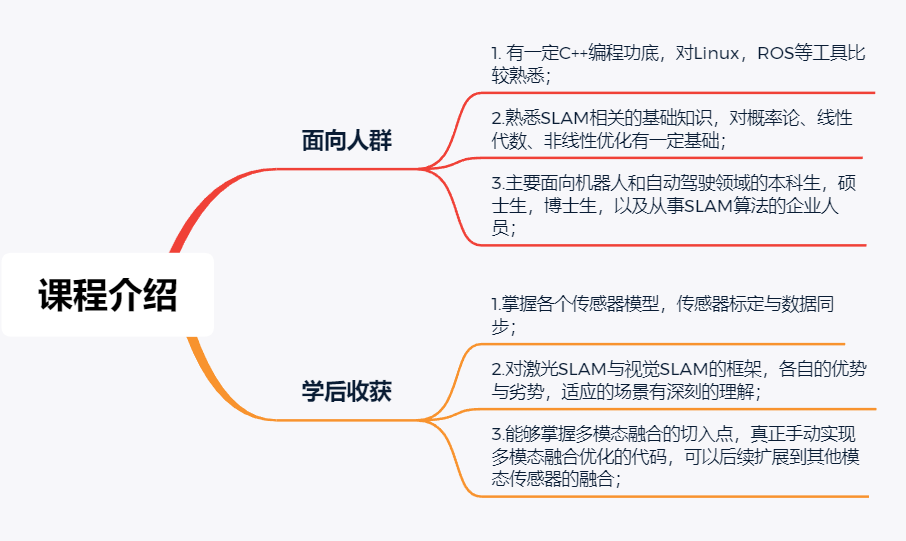
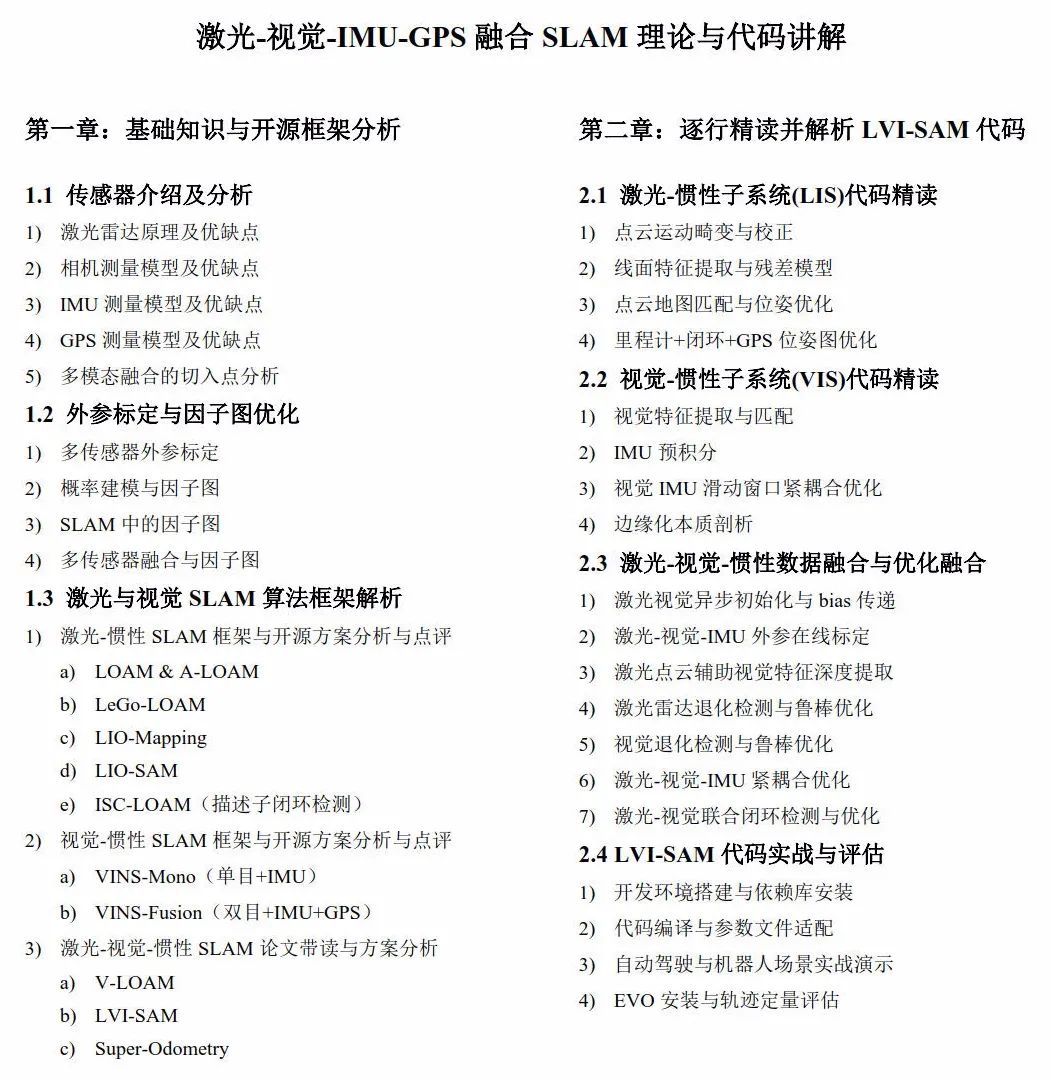
激光-视觉-IMU-GPS融合SLAM理论与代码讲解
课程链接:彻底剖析激光-视觉-IMU-GPS融合SLAM算法:理论推导、代码讲解和实战
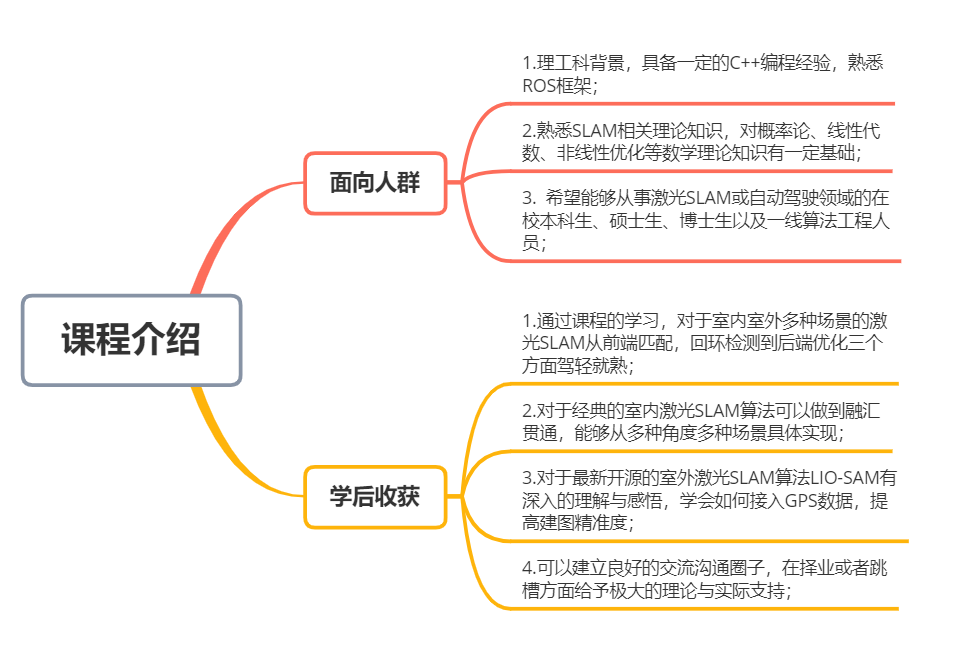
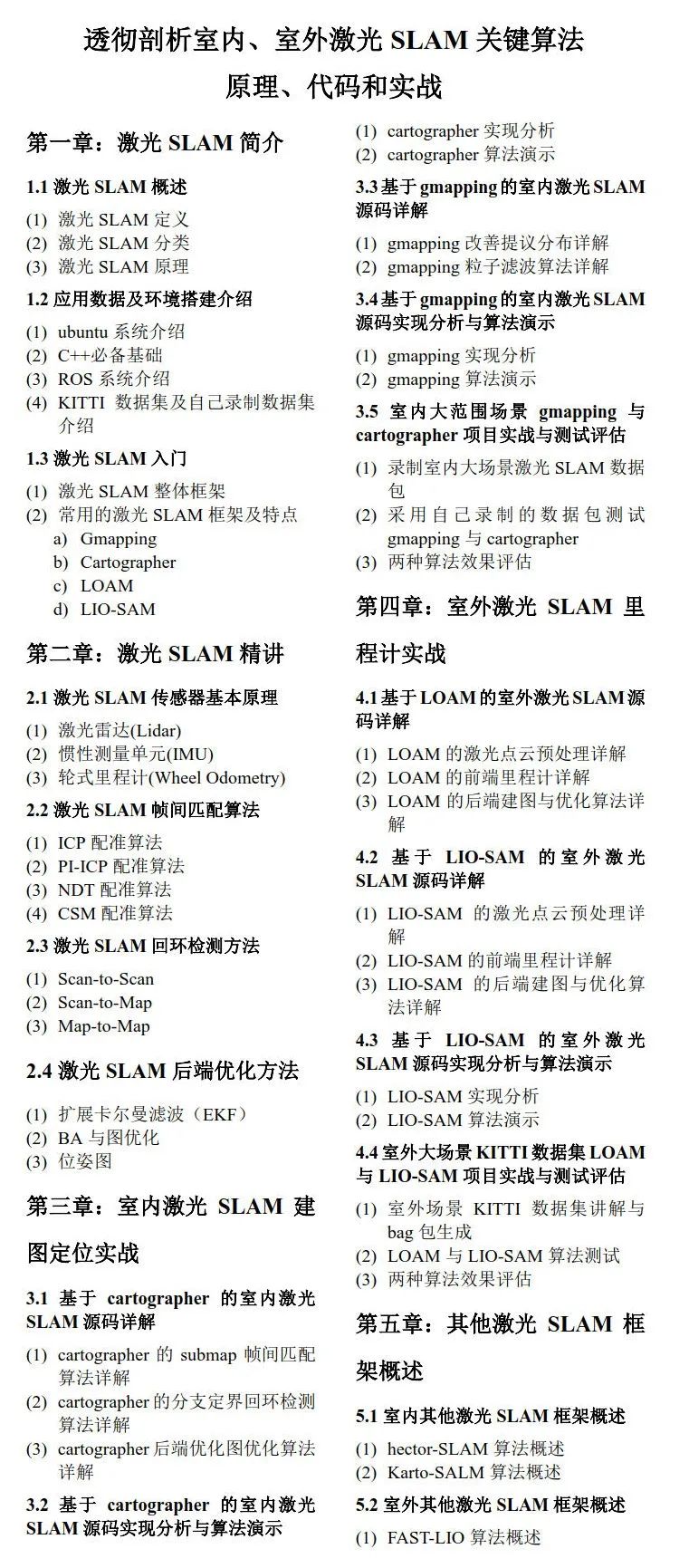
透彻剖析室内、室外激光SLAM关键算法原理、代码和实战
课程链接:彻底剖析室内、室外激光SLAM关键算法原理、代码和实战(cartographer+LOAM+LIO-SAM)
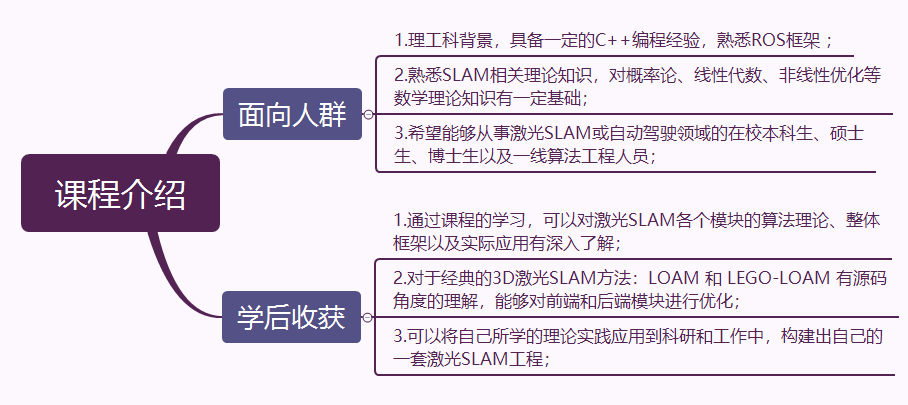
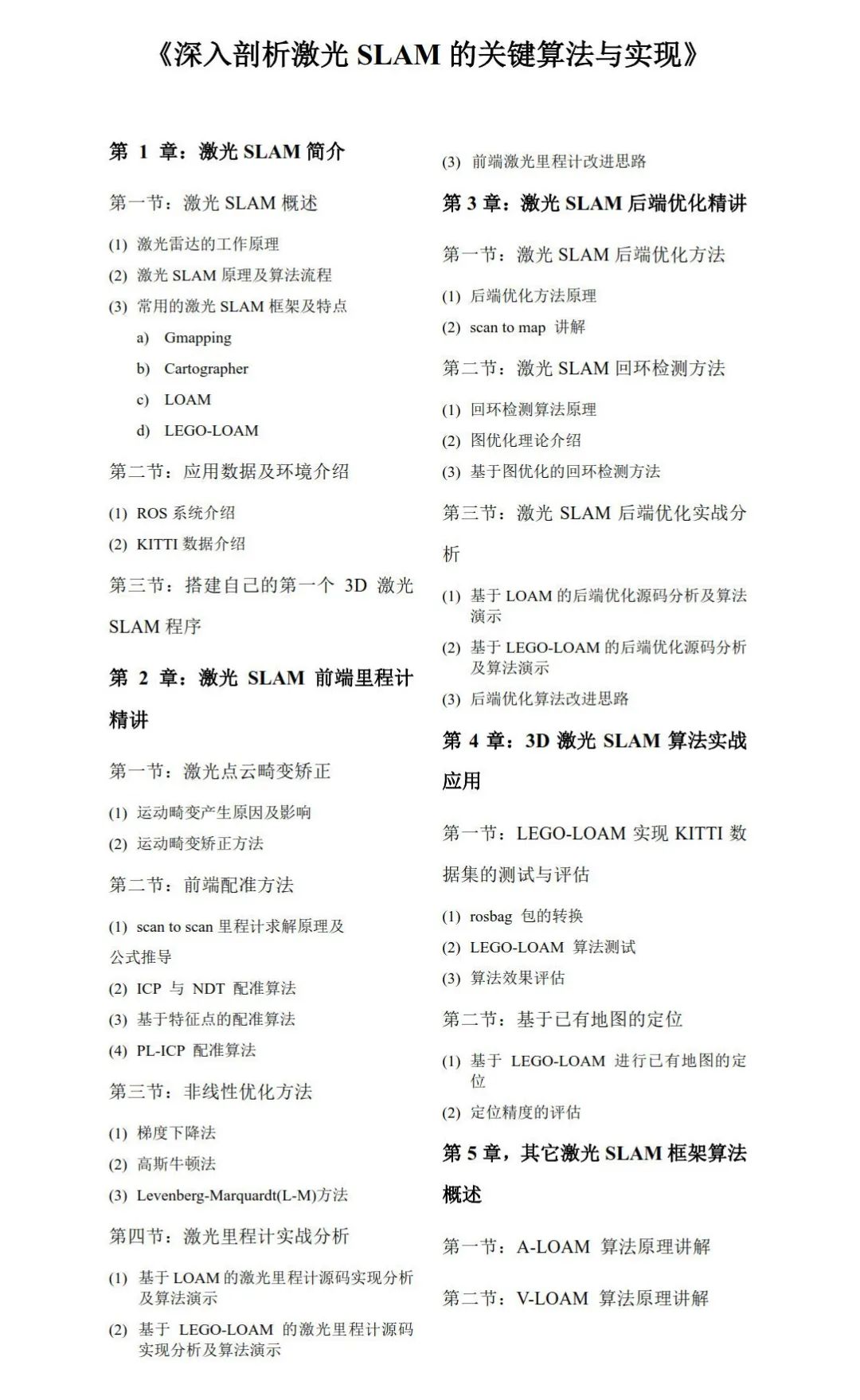
深入剖析激光SLAM的关键算法与实现
课程链接:深入剖析激光SLAM的关键算法与源码实现
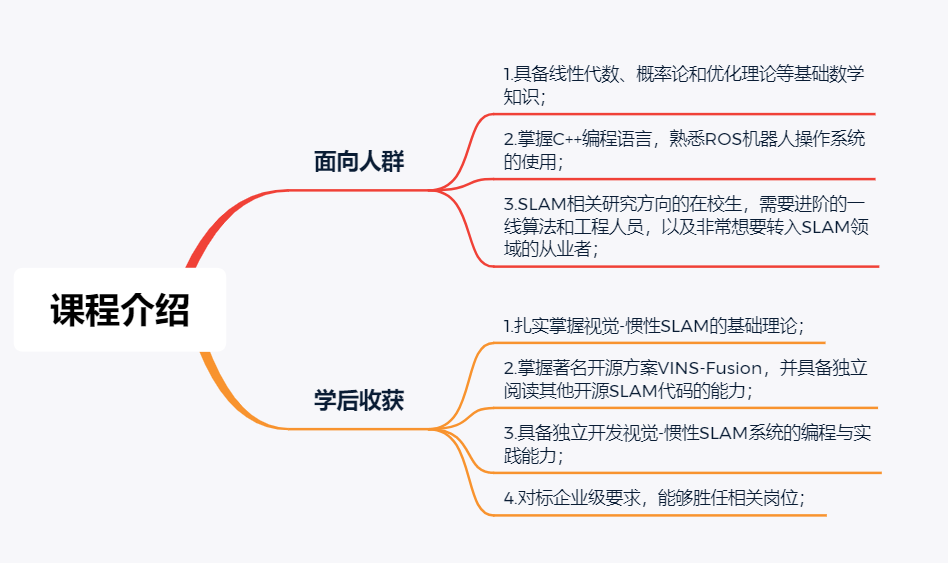
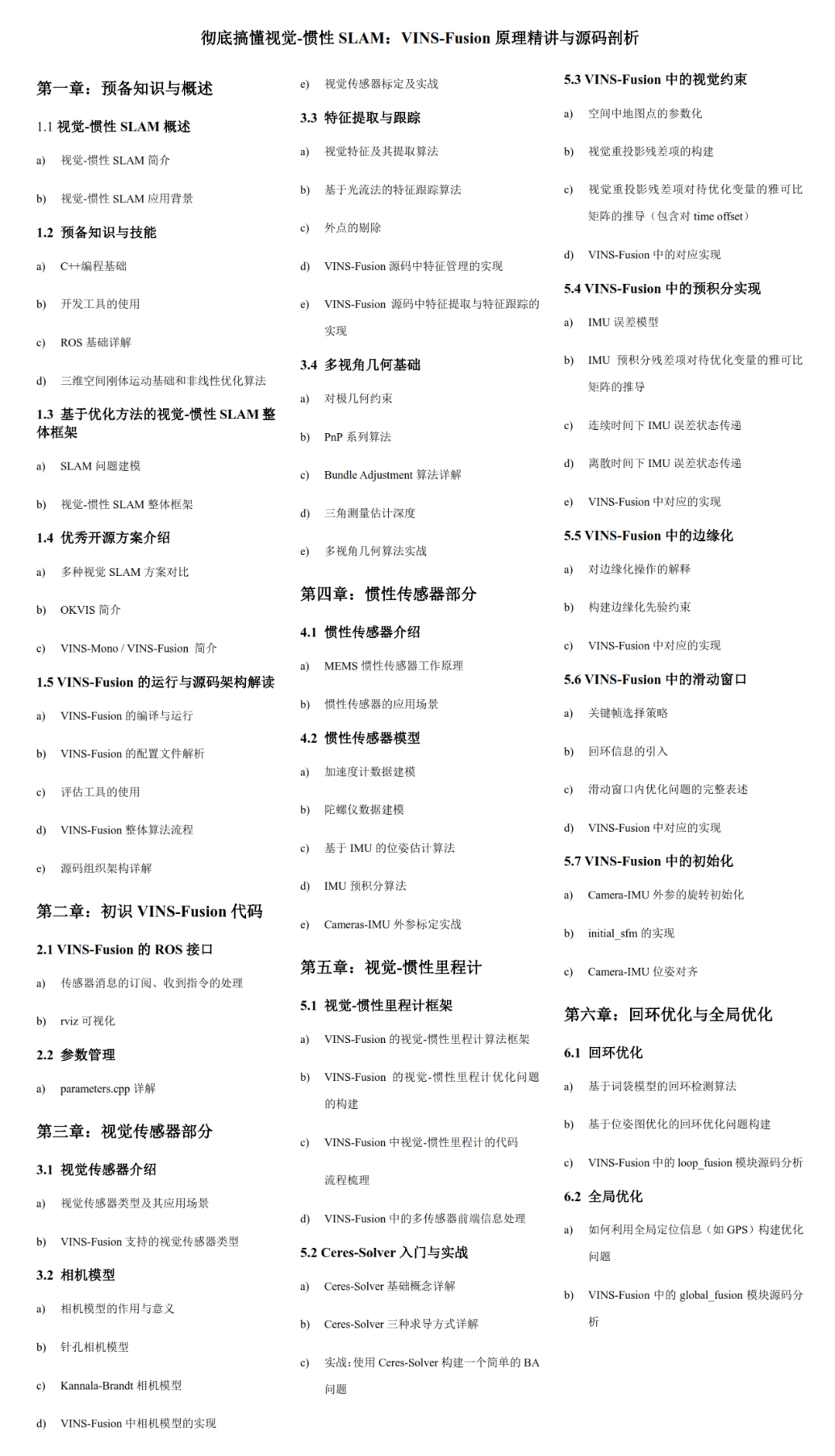
视觉-惯性SLAM入门与实践
课程链接:彻底搞懂视觉-惯性SLAM:基于VINS-Fusion正式开课啦
评论