
MIT博士生杨珩:从L1到L5,自动驾驶的“拦路虎”可能是一个数学问题

什么叫做「可认证感知算法」(Certifiable Perception Algorithm)?它对自动驾驶,或其他机器人(Robotics)方向的研究意义是什么?它的研究难点又是什么?
事实上,「可认证感知算法」最早是一个数学上的概念,在2016年由苏黎世联邦理工学院(ETH)数学系的教授、2018年斯隆研究奖获得者 Afonso S. Bandeira 在“A Note on Probably Certifiably Correct Algorithms”一文中提出。
针对许多优化问题在获得一个解时、没有后验(a posteriori)证明该解是否为最优解的情况,Bandeira 提出了一个 PCC(Probably Correct Certifiable)算法,不仅可以解决经典的优化实例问题,还可以提供一个「后验证书」(a posteriori certificate),向研究人员证明该解为最优解。
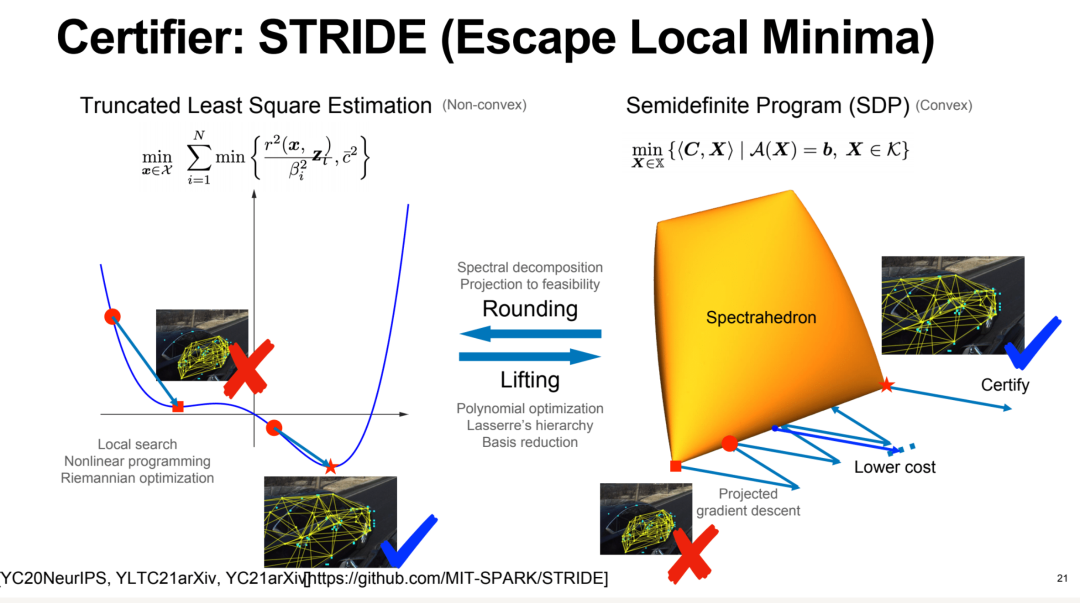
在 Bandeira 的这篇工作中,PCC算法也被应用于机器学习的某些场景,比如学习随机块模型(stochastic block model)。本质上,“certificate”是一个数学测度,揭示了研究人员求得的解与全局最优解之间的差距。例如,当差距非常小,只有一亿分之一时,那么研究人员就能知道,该解已是近似最优,可以视为全局最优。
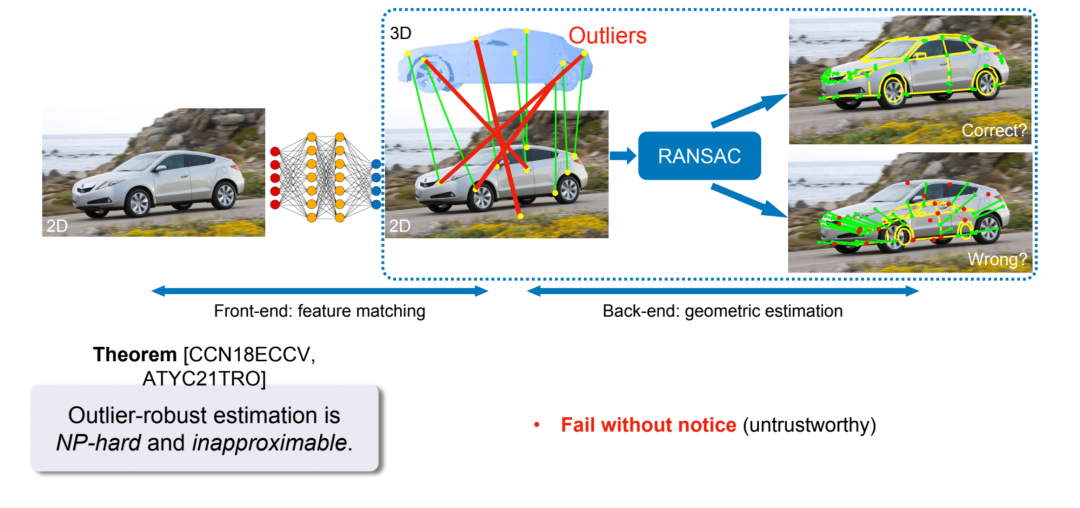
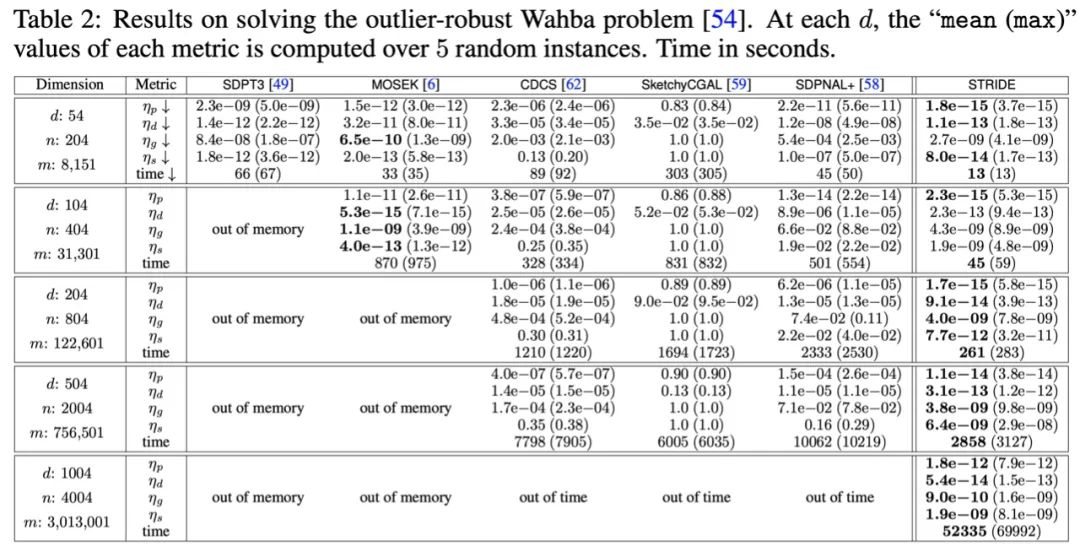
因为那篇文章是第一个能将有异常值(outliers)的机器人感知问题在多项式时间内(polynomial time)解到全局最优(global optimality)的工作。我们设计的半正定规划松弛(SDP relaxation)是extremely tight,那个算法几乎对所有问题都能得到全局最优,而且它解的原问题是一个带有二元变量(+1 和 -1,mixed integer)的非凸问题。这种问题是一个NP-hard问题。

非凸问题永远不可能等价于凸问题,但如果满足一定条件,我们就可以用一个足够大的凸问题来逼近/解决一个非凸问题。不过,我们并不明确该非凸问题有多大,它可能是无限大。
4. 数学不可或缺
硬核数学问题会非常考验人的耐心。我觉得有时候也不是难不难的问题,而是你能不能花一天的时间看一篇数学文章,搞懂这篇文章的所有细节。有可能你看了5遍之后,你就会醍醐灌顶。在那一瞬间,这个方法成为了你自己的方法。一旦你掌握了这个方法之后,你就会发现这个方法特别地 powerful(强大),可以将它应用到很多别的方案中。 如果有一天,你能想明白数学家是怎么理解问题的,可能你的境界就高了一层。

评论