
浅谈CSwin-Transformers
【GiantPandaCV导语】局部自注意力已经被很多的VIT模型所采用,但是没有考虑过如何使得感受野进一步增长,为了解决这个问题,Cswin提出了使用交叉形状局部attention,同时提出了局部增强位置编码模块,超越了Swin等模型,在多个任务上效果SOTA,本文给出Cswin的详细解读和分析。
论文链接:https://arxiv.org/abs/2107.00652
论文代码:https://github.com/microsoft/CSWin-Transformer
知乎专栏: https://www.zhihu.com/people/flyegle
1. 出发点
基于global attention的transformer效果虽然好但是计算量太大了。 基于local attention的transformer的会限制每个token的感受野的交互,减缓感受野的增长。
2. 怎么做
提出了Cross-Shaped Window self-attention机制,可以并行计算水平和竖直方向的self-attention,可以在更小的计算量条件下获得更好的效果。 提出了Locally-enhanced Positional Encoding(LePE), 可以更好的处理局部位置信息,并且支持任意形状的输入。
3. 模型结构
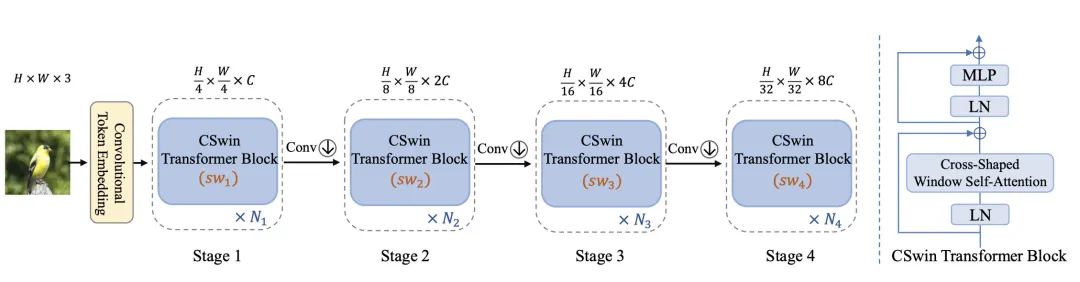 模型整体结构如上所示,由token embeeding layer和4个stageblock所堆叠而成,每个stage block后面都会接入一个conv层,用来对featuremap进行下采样。和典型的R50设计类似,每次下采样后,会增加dim的数量,一是为了提升感受野,二是为了增加特征性。下面详解每个部分的构成。
模型整体结构如上所示,由token embeeding layer和4个stageblock所堆叠而成,每个stage block后面都会接入一个conv层,用来对featuremap进行下采样。和典型的R50设计类似,每次下采样后,会增加dim的数量,一是为了提升感受野,二是为了增加特征性。下面详解每个部分的构成。
3.1. Convolutional Token Embeeding
顾名思义,用convolution来做embeeding,为了减少计算量,本文直接采用了7x7的卷积核,stride为4的卷积来直接对输入进行embeeding,假设输入为,那么输出为。
3.2. Cross-Shaped Window Self-Attention
尽管有很强的长距离上下文建模能力,但原始的global self-attention的计算复杂度与特征图大小平方(H==W的情况)成正比的。因此,对于以高分辨率特征图为输入的视觉任务,如物体检测和分割,计算成本会非常大。为了缓解这个问题,现有的工作Swin等建议使用local windows self-attention,通过shift窗口来扩大感受野。然而,每个Transformer块内的token依旧是有限的注意区域,需要堆叠更多的block来实现全局感受野。为了更有效地扩大注意力区域和实现全局性的自我注意,有了Cross-shaped Window Self-attention,下面细讲是怎么做的以及代码实现。
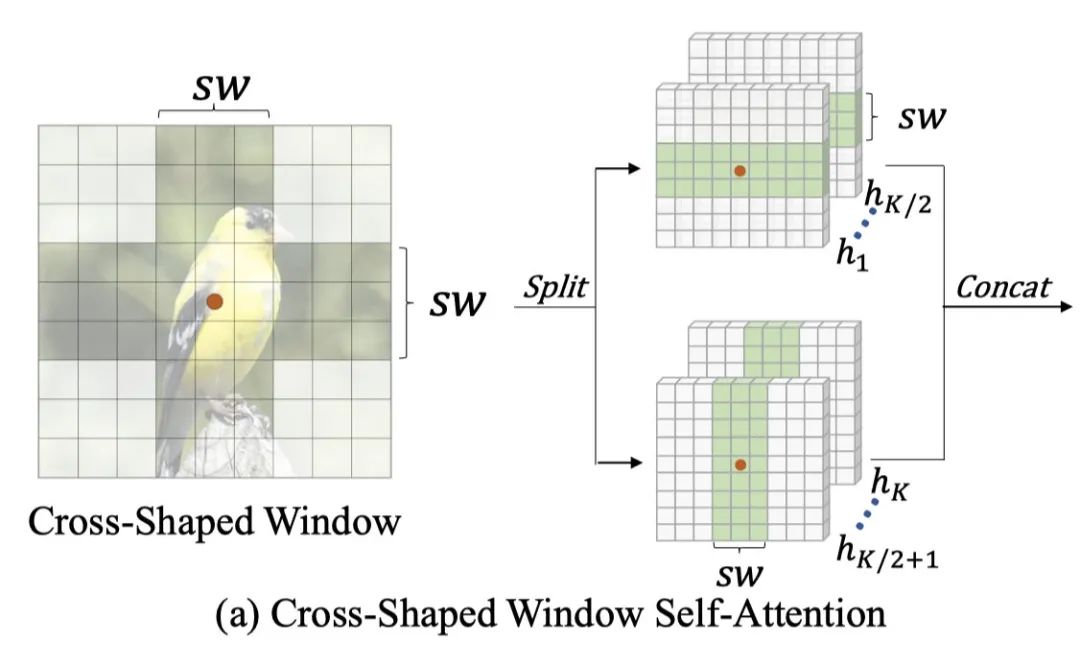
看图说话,很简单,假设原始的featuremap为,设置windows的大小为,如果我们希望做行attention,设置为,设置为,那么就可以获得一个的局部窗口,同理,如果我们希望做列attention,设置为,设置为,可以获得一个的窗口。同时,对应的dim一分为2,一部分用于计算行attention,另一部分用于计算列attention,最后在concat起来,实现并行处理。由于transformers在计算attention的时候是采用mutilhead的,为了保持计算量,本文对head一分为2,一部分用于行attention,一部分用于列attention。以行attention为例,公式如下:
其中,窗口大小为, 相比于标准的self-attention,区别在于H,或者W是部分的而不是全部的,如下图所示。
标准的self-attention 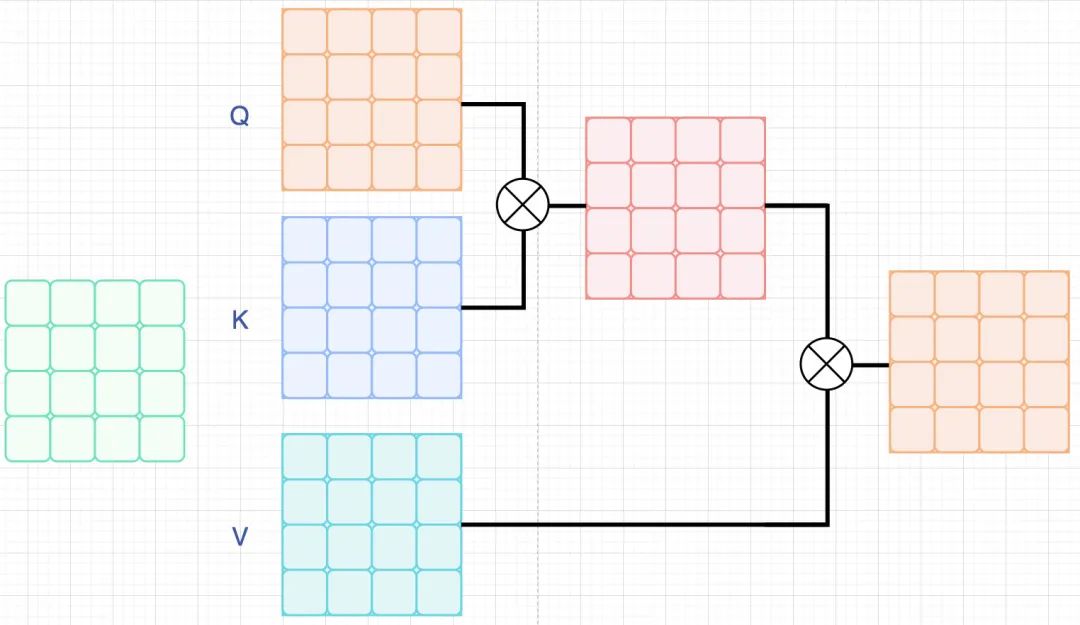
(行or列)self-attention 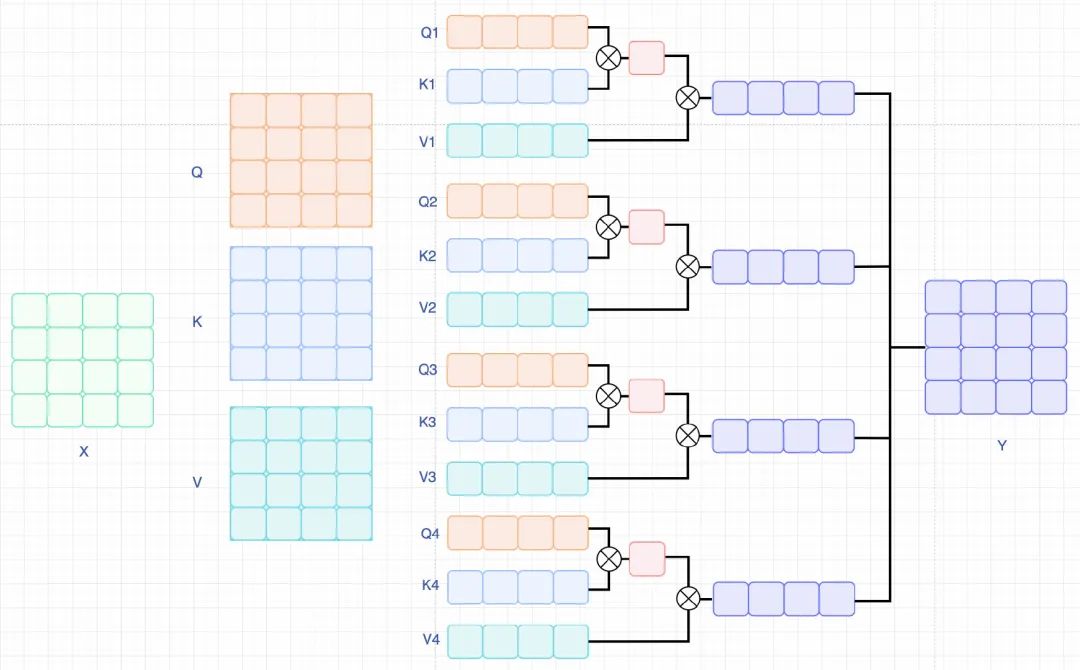
自己的思考其实乍一看很像ACNet和RepVGG,只不过他们是全都要,本文的话只要行和列的计算。在Transformers的attention中,Q实际上起指导的作用,K则是用来做token之间的交互,那么对于一个的矩阵,会得到一个的attention map,意义就是在Q的指导下得到的关于K的attention。很多的时候我们会发现这个attention map 高亮的部分往往都是集中于对角线区域以及周围的部分区域,也就是自己attention自己和对自己有用的token。那么我们是不是就可以拆解这两部分,构造两个attention,一个用于自己attn自己,一个用于attn对自己有价值的位置。那么先拆解为表示的是第一个token,得到的atten结果,那么意义就是当前的toke与其他的token之间的相似度。反过来,表示的每个token,同样得到的atten结果,但是意义为每个token指导第一个token的embeeding的变化。两者结合,就是找对自己有用的token。 Q&A Question: 本文的另一个核心思想是增大感受野,那么怎么才能增大感受野呢?
Answer: 首先明确一点,cross-shaped windows self-attention,并不是基于一个H和W相等的window来做attention的,实际的窗口大小是随着featuremap和滑动步长的改变而变化的。我们知道R50是通过1/32的下采样来获得很大的感受野,cross-shaped也是如此,通过降采样图像大小,同时增加窗口滑动步长, 最终从local-attention 变为 global-attention, 实现扩张感受野。(这里说感受野不准,应该表示为长距离依赖)
3.3. Locally-Enhanced Positional Encoding(LePE)
 上图所示,左边为VIT模型的PE,使用的绝对位置编码或者是条件位置编码,只在embeeding的时候与token一起进入transformer,中间的是Swin,CrossFormer等模型的PE,使用相对位置编码偏差,不再和输入的embeeding一起进入transformer,通过引入token图的权重,来和attention一起计算,灵活度更好相对APE效果更好。最后就是本文所提出的LePE,相比于RPE,本文的方法更加直接,直接作用在value上,公式如下:
上图所示,左边为VIT模型的PE,使用的绝对位置编码或者是条件位置编码,只在embeeding的时候与token一起进入transformer,中间的是Swin,CrossFormer等模型的PE,使用相对位置编码偏差,不再和输入的embeeding一起进入transformer,通过引入token图的权重,来和attention一起计算,灵活度更好相对APE效果更好。最后就是本文所提出的LePE,相比于RPE,本文的方法更加直接,直接作用在value上,公式如下:
这里,表示的是Value的位置权重,有。但是直接去计算, 还是有一定程度的计算量,假设对于输入,对其影响大的元素只在他的附近,所以改写公式为:
这样,LePE可以友好地应用于将任意输入分辨率作为输入的下游任务。
3.4. CSWin Transformer Block
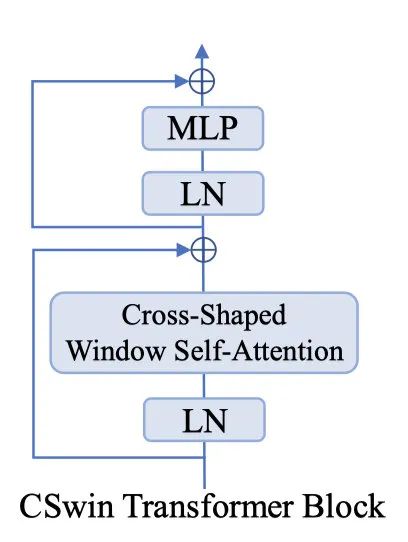
CSwin的block很简单,有两个prenorm堆叠而成,一个是做LayerNorm和Cross-shaped window self-attention并接一个shortcut,另一个则是做LayerNorm和MLP,相比于Swin和Twins来说,block的计算量大大的降低了(swin,twins则是有两个attention+两个MLP堆叠一个block)。公式如下:
3.5. Code Review
class LePEAttention(nn.Module):
def __init__(self, dim, resolution, idx, split_size=7, dim_out=None, num_heads=8, attn_drop=0., proj_drop=0., qk_scale=None):
super().__init__()
self.dim = dim
self.dim_out = dim_out or dim
self.resolution = resolution
self.split_size = split_size
self.num_heads = num_heads
head_dim = dim // num_heads
# NOTE scale factor was wrong in my original version, can set manually to be compat with prev weights
self.scale = qk_scale or head_dim ** -0.5
if idx == -1: # global attenton
H_sp, W_sp = self.resolution, self.resolution
elif idx == 0: # row attention
H_sp, W_sp = self.resolution, self.split_size
elif idx == 1: # column attention
W_sp, H_sp = self.resolution, self.split_size
else:
print ("ERROR MODE", idx)
exit(0)
self.H_sp = H_sp
self.W_sp = W_sp
stride = 1
self.get_v = nn.Conv2d(dim, dim, kernel_size=3, stride=1, padding=1,groups=dim)
self.attn_drop = nn.Dropout(attn_drop)
def im2cswin(self, x):
B, N, C = x.shape
H = W = int(np.sqrt(N))
# (B, N, C) -> (B, C, N) -> (B, C, H, W)
x = x.transpose(-2,-1).contiguous().view(B, C, H, W)
x = img2windows(x, self.H_sp, self.W_sp) # (B*(H//h_sp, W//w_sp), h_sp * w_sp, C)
# (B*(H//h_sp, W//w_sp), h_sp * w_sp, C) -> (B*(H//h_sp, W//w_sp), h_sp*w_sp, h, C//h) -> (B*(H//h_sp, W//w_sp),h, h_sp*w_sp, C//h)
x = x.reshape(-1, self.H_sp* self.W_sp, self.num_heads, C // self.num_heads).permute(0, 2, 1, 3).contiguous()
return x
def get_lepe(self, x, func):
B, N, C = x.shape
H = W = int(np.sqrt(N))
x = x.transpose(-2,-1).contiguous().view(B, C, H, W)
H_sp, W_sp = self.H_sp, self.W_sp
x = x.view(B, C, H // H_sp, H_sp, W // W_sp, W_sp)
x = x.permute(0, 2, 4, 1, 3, 5).contiguous().reshape(-1, C, H_sp, W_sp) ### B', C, H', W'
lepe = func(x) ### B', C, H', W' # dw conv
# (B', C, H', W') -> (B, h, C//h, h_sp * w_sp) -> (B, h, h_sp*w_sp, C//h)
lepe = lepe.reshape(-1, self.num_heads, C // self.num_heads, H_sp * W_sp).permute(0, 1, 3, 2).contiguous()
x = x.reshape(-1, self.num_heads, C // self.num_heads, self.H_sp* self.W_sp).permute(0, 1, 3, 2).contiguous()
return x, lepe
def forward(self, qkv):
"""
x: B L C
"""
q,k,v = qkv[0], qkv[1], qkv[2]
### Img2Window
H = W = self.resolution
B, L, C = q.shape
assert L == H * W, "flatten img_tokens has wrong size"
q = self.im2cswin(q)
k = self.im2cswin(k)
v, lepe = self.get_lepe(v, self.get_v)
q = q * self.scale
attn = (q @ k.transpose(-2, -1)) # B head N C @ B head C N --> B head N N
attn = nn.functional.softmax(attn, dim=-1, dtype=attn.dtype)
attn = self.attn_drop(attn)
x = (attn @ v) + lepe # B head N N @ B head N C
# (B, h, N, C//h) --> (B, N, C)
x = x.transpose(1, 2).reshape(-1, self.H_sp* self.W_sp, C)
### Window2Img
x = windows2img(x, self.H_sp, self.W_sp, H, W).view(B, -1, C) # B (H' W') C
return x
代码很简单,对于滑窗后的处理,都是把外循环并入到了batch的维度了,可以并行处理。因为是按照dim来进行分水平和竖直的, 所以对应的heads也进行相应的分发处理。
4. 实验
4.1. 模型设计
 还是按照FLOPs的分布,来设计了四种模型,CSWin-T,CSWin-S,CSWin-B,CSwin-L,这里的FLOPs都是在224x224条件下计算的。
还是按照FLOPs的分布,来设计了四种模型,CSWin-T,CSWin-S,CSWin-B,CSwin-L,这里的FLOPs都是在224x224条件下计算的。
4.2. imagenet结果
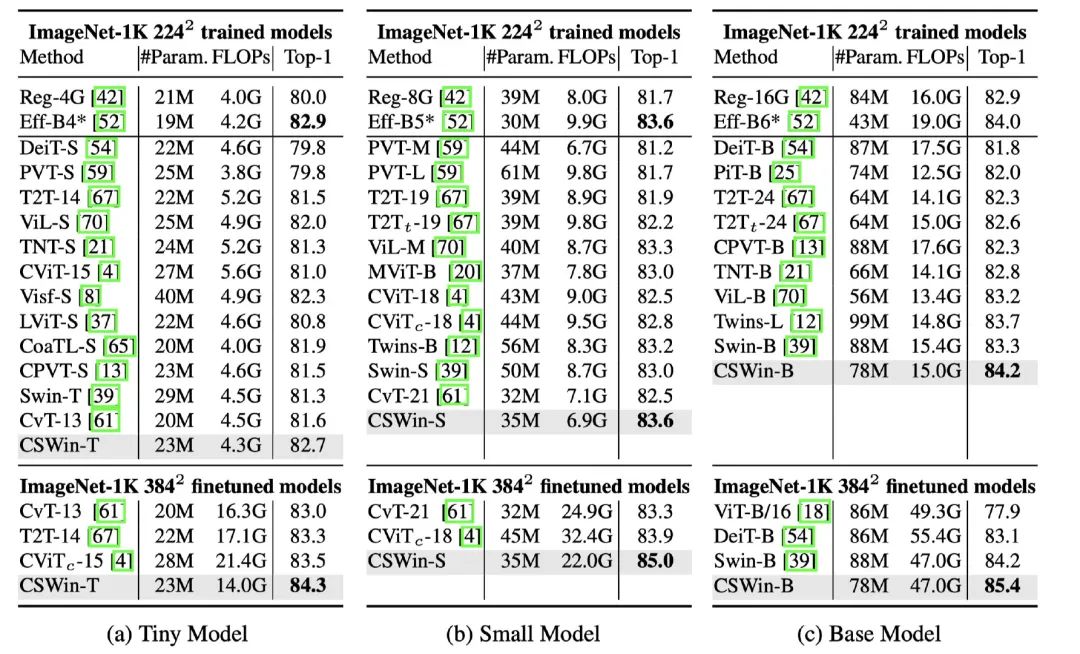 224表示的是模型在224x224的输入下,使用imagenet1k的数据来训练得到的结果,384表示的是在384x384上进行微调后的结果,可以看到CSWin取得了比较SOTA的结果。
224表示的是模型在224x224的输入下,使用imagenet1k的数据来训练得到的结果,384表示的是在384x384上进行微调后的结果,可以看到CSWin取得了比较SOTA的结果。
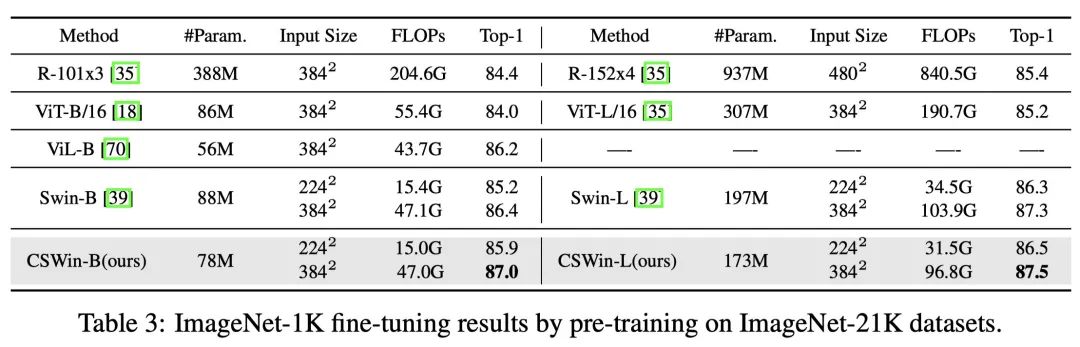 使用imagenet21k做pretrain后在imagenet1k上微调的结果,可以发现用更多的数据训练出来的模型做pretrain对于所有模型都有提升,cswin无论是224和384尺度训练都取得了SOTA。
使用imagenet21k做pretrain后在imagenet1k上微调的结果,可以发现用更多的数据训练出来的模型做pretrain对于所有模型都有提升,cswin无论是224和384尺度训练都取得了SOTA。
4.3. 检测和分割结果
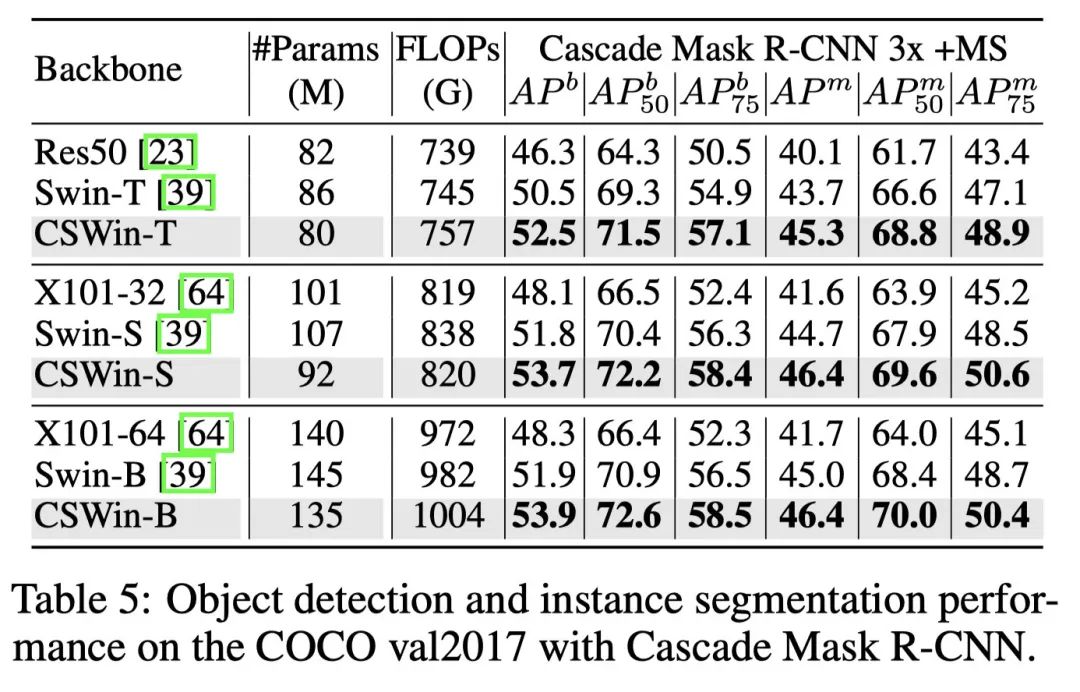
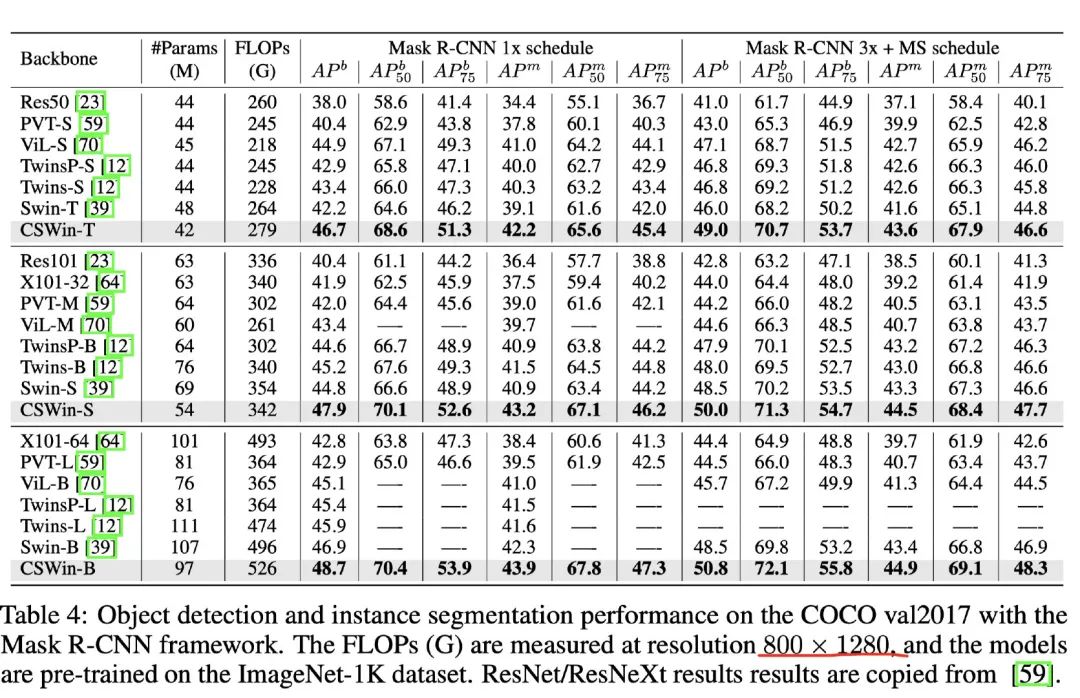
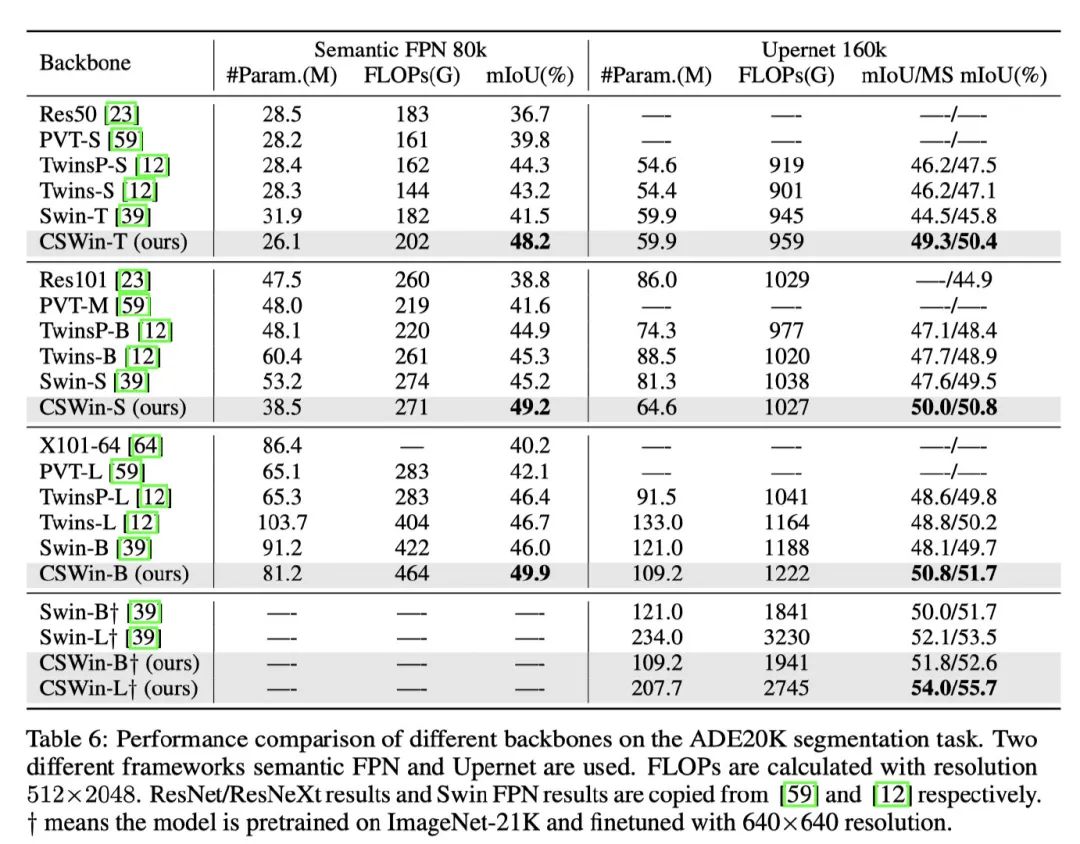
下游任务上,均有着非常sota的表现。
4.4. 消融实验
模型结构+trick 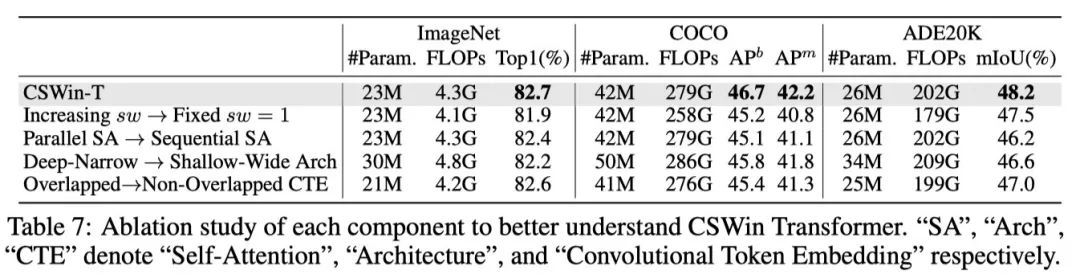 实验采用的模型是CSWin-T,imagenet上的结果为82.7%。
实验采用的模型是CSWin-T,imagenet上的结果为82.7%。
滑动窗口的步长从每个stage增长改为每个stage固定为1,发现性能下降了0.8个点,说明感受野的大小会影响模型的结果 并行attention改成序列化attention,性能降低了0.3%个点。 模型的设计,从深窄变成矮胖结构,性能下降了0.5%个点,这一点实际上在CNN都已经有过证明了。 卷积获取embeeding改为非重叠切片获取embeeding,性能下降了0.1%个点,说明overlap和非overlap对于token来说意义不大,因为最终也是可以看到全局的。
attention&position embeeding 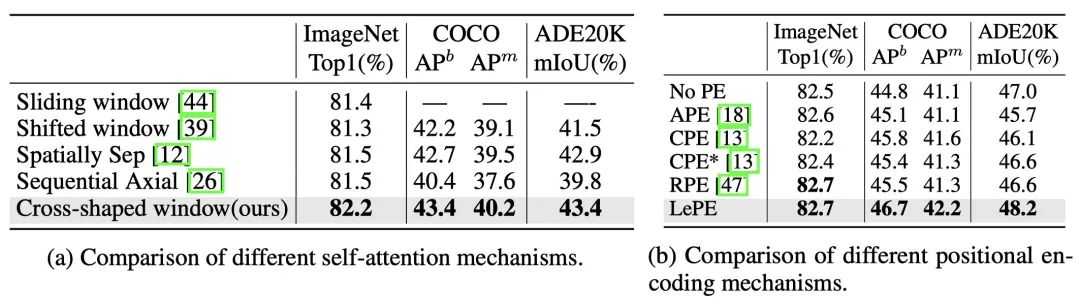
本文提出的Cross-shaped window self-attention机制,不仅在分类任务上超过之前的attention,同时检测和分割这样的dense任务上效果也非常不错,说明对于感受野的考虑是非常正确的。 虽然RPE和LePE在分类的任务上性能类似,但是对于形状变化多的dense任务上,LePE更深一筹。
5. 结论
在本文中,提出了CSWin Transformer。CSWin Transformer的核心设计是CSWin Self-Attention,它通过将多头分成平行组来执行水平和垂直条纹的自我注意。这种多头分组设计可以有效地扩大一个Transformer块内每个token的注意区域。同时,进一步将局部增强的位置编码引入CSWin Transformer,可以更有效的用于下游任务。大量的实验证明了CSWin Transformer的有效性和高效性。
- END-
为了感谢读者的长期支持,今天我们将送出三本由 人民邮电出版社 提供的:《Python计算机视觉与深度学习实战》 。点击下方抽奖助手参与抽奖。没抽到并且对本书有兴趣的也可以使用下方链接进行购买。
《Python计算机视觉与深度学习实战》立足实践,从机器学习的基础技能出发,深入浅出地介绍了如何使用 Python 进行基于深度学习的计算机视觉项目开发。开篇介绍了基于传统机器学习及图像处理方法的计算机视觉技术;然后重点就图像分类、目标检测、图像分割、图像搜索、图像压缩及文本识别等常见的计算机视觉项目做了理论结合实践的讲解;最后探索了深度学习项目落地时会用到的量化、剪枝等技术,并提供了模型服务端部署案例。
《Python计算机视觉与深度学习实战》适合有一定的Python 编程基础,初学深度学习的读者阅读。
欢迎添加微信,加入GiantPandaCV交流群