3D视觉之线激光3D相机
点击下方卡片,关注“新机器视觉”公众号
重磅干货,第一时间送达
1 3D 视觉




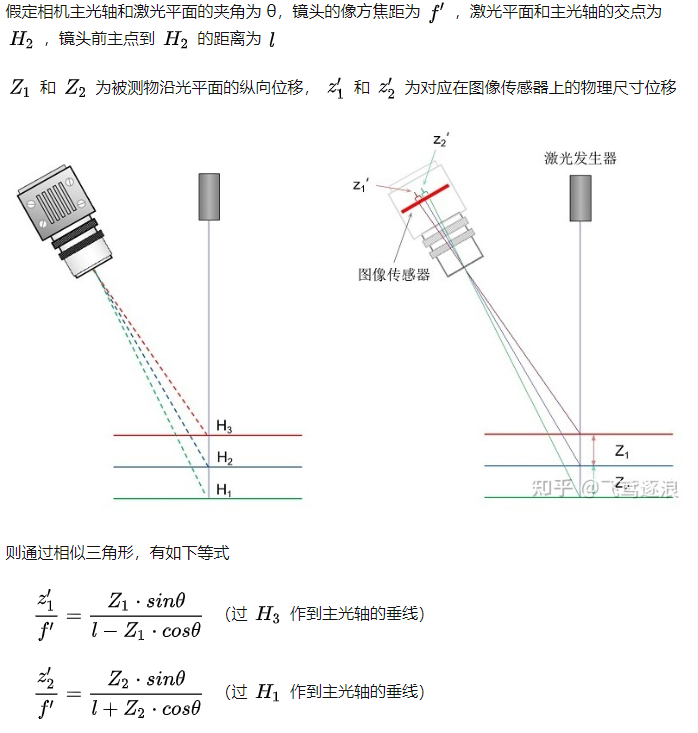
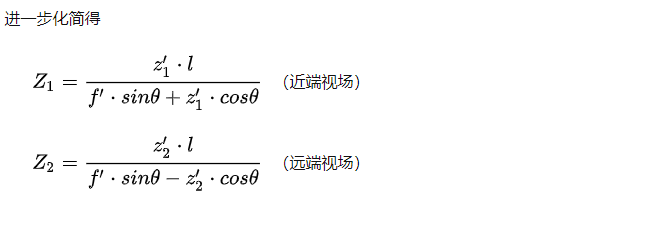
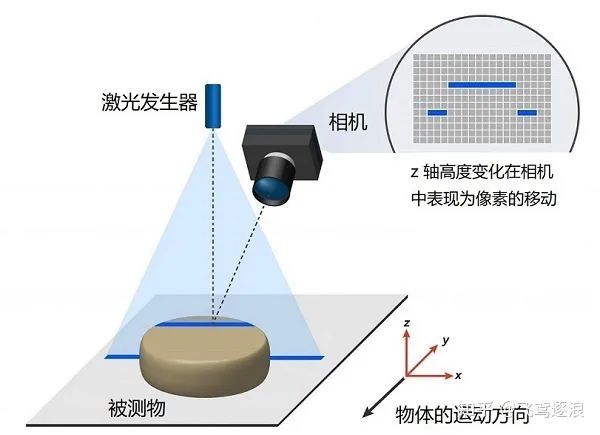
2 激光三角法

2.1 测量原理
2.2 精度范围

3 线激光3D相机
3.1 深度测量范围
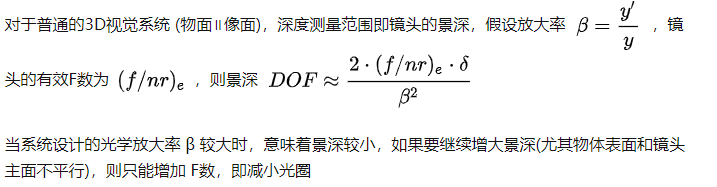
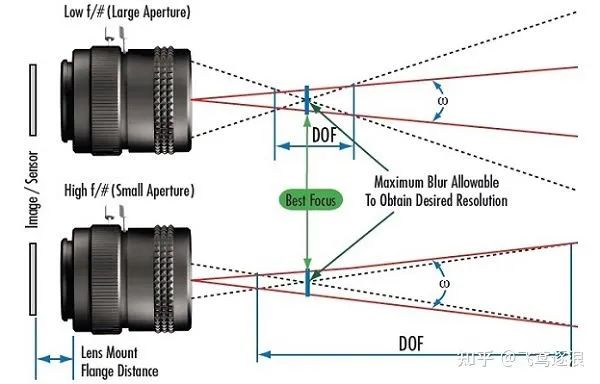
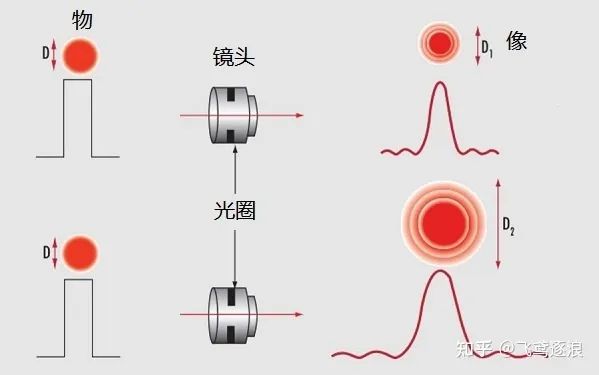
3.1.1 镜头景深
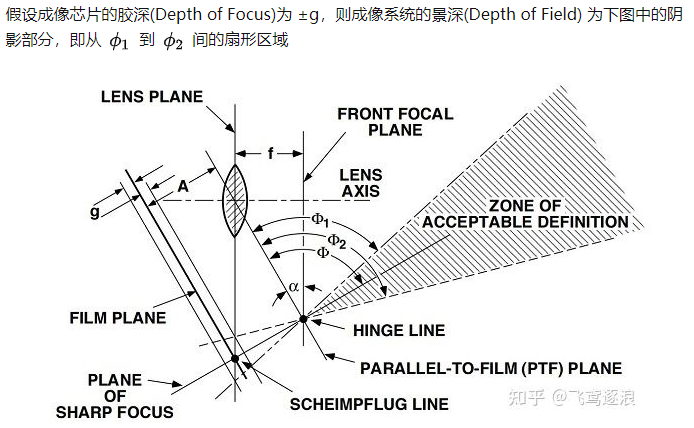
3.1.2 沙姆定律



3.2 结构形式

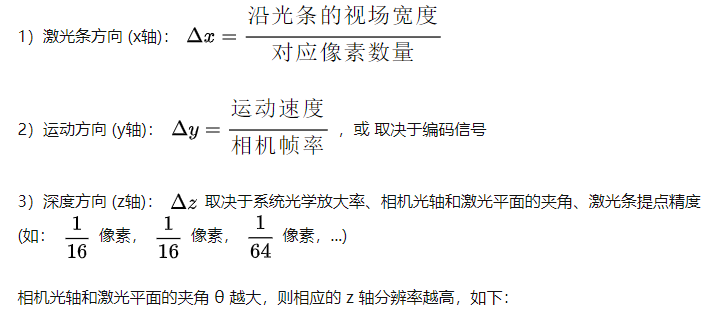
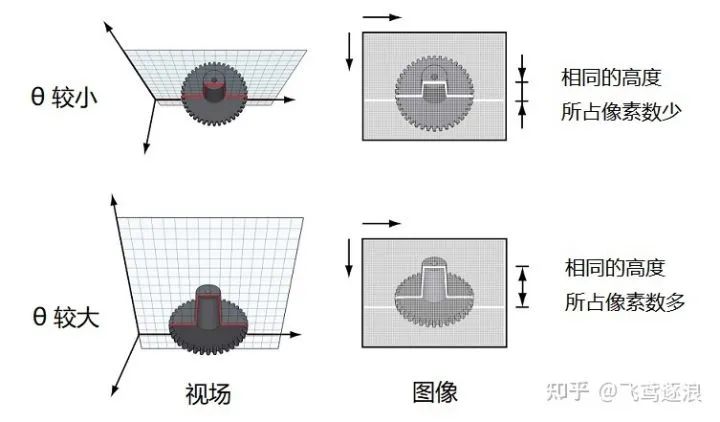
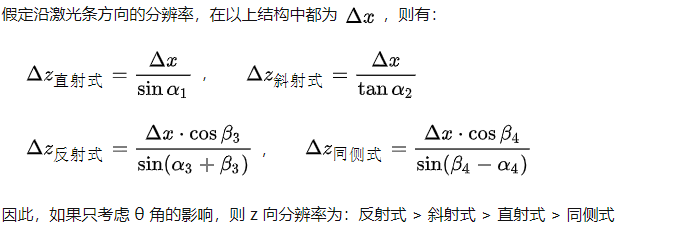
3.2.1 分辨率
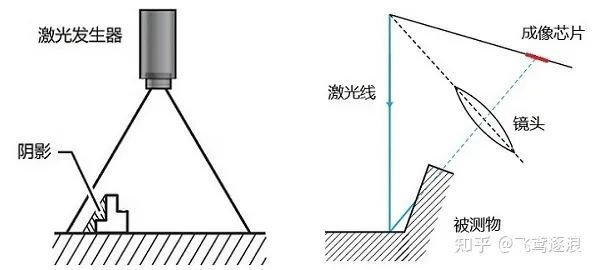
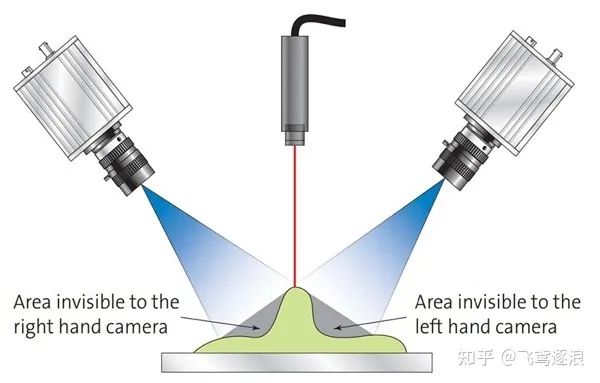
3.2.2 光学遮挡
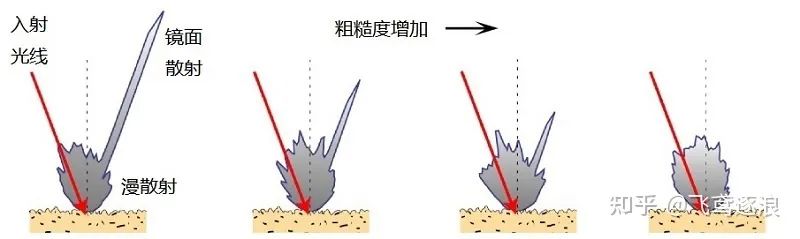
3.3 散射特性




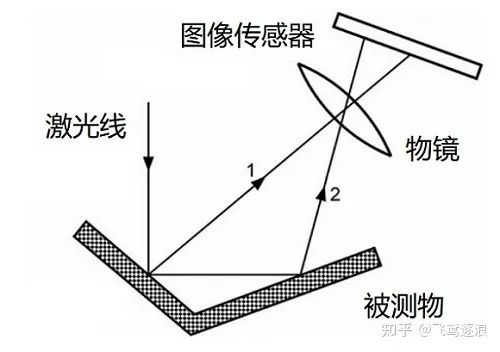
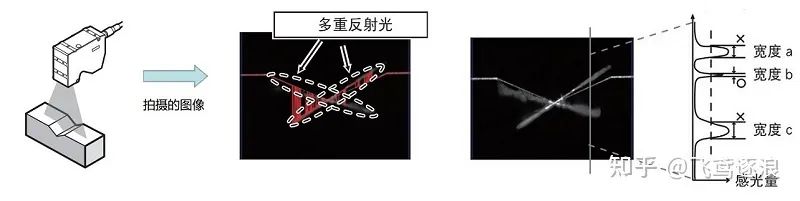
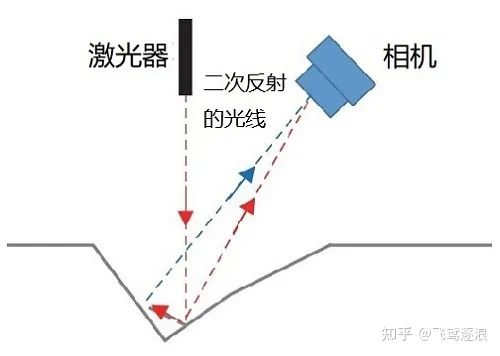
3.4 多重反射
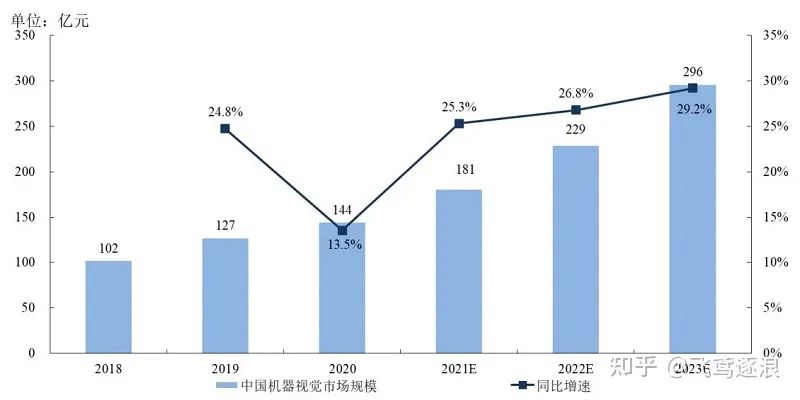
4 行业浅析
参考资料
本文仅做学术分享,如有侵权,请联系删文。
评论
 下载APP
下载APP点击下方卡片,关注“新机器视觉”公众号
重磅干货,第一时间送达
本文仅做学术分享,如有侵权,请联系删文。