
工业镜头参数知多少
机器视觉系统中,镜头作为机器的眼睛,其主要作用是将目标物体的图像聚焦在图像传感器(相机)的光敏器件上。数据系统所处理的所有图像信息均需要通过镜头得到,镜头的质量直接影响到视觉系统的整体性能。
这一期镜头学堂将对机器视觉工业镜头相关参数做简要介绍:
1、焦距(EFL)
定义:透镜中心到像方焦点的距离。
光学系统中的焦距用来衡量光学系统汇聚或发散光线的能力。

焦距示意图
该如何理解焦距与视场角的关系呢?
对于相同的感光元件,搭配的镜头焦距越长,视场角越小,反之成立(排除枕形畸变的影响)。
可以根据下面这组图片来直观的感受一下。
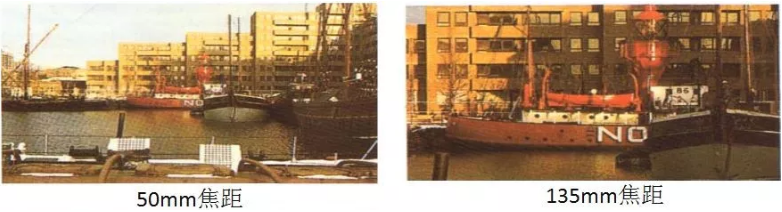
注:使用同款感光芯片
2、光圈数(F.No)
定义:焦距(EFL)与入瞳(D,光圈在物方空间的像)的比值,即F.No=EFL/D。
F.No数的大小是如何对画面亮度、景深及装配灵敏度产生影响的呢?
a.画面亮度
F.No数的大小决定进入光学系统能量的多少。
F.No越大,进入光学系统的光线越少,画面越暗;F.No越小,进入光学系统的光线越多,画面越亮。
如下图所示:

注:此项默认相机曝光时间、增益等参数恒定。
b.景深
在其它所有参数保持一致的前提下,F.No越大,景深越大;F.No越小,景深越小。
c.装配灵敏度
F.No越大,图像对安装倾斜的灵敏度低,越易于装配;F.No越小,图像对安装倾斜的灵敏度高,越不易于装配。
光学畸变:
光学畸变指的是物体经过光学系统所成的像对于物体本身而言的失真程度。
光学畸变计算方法:
OP.Dist(%)=(实际像高-理想像高)/理想像高 × 100%
TV 畸变
TV畸变指的是实际拍摄图像时,像的变形程度。
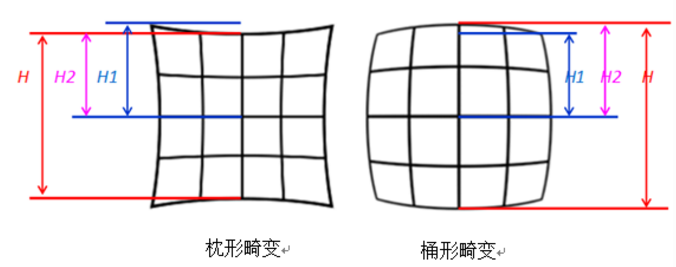
TV畸变计算方法:
TV.Dist(%)=(H1 - H2)/H
TV畸变可分为枕形畸变和桶形畸变,对角线向外延长的变形(畸变值为正)称作枕形畸变,反之,对角线向内缩短的变形(畸变值为负负)称作桶形畸变。
4、视场角(Field of View)
定义:镜头在感光元器件上所能看到的空间角度范围,即光学系统入瞳中心对物的张角或出瞳中心对像的张角。
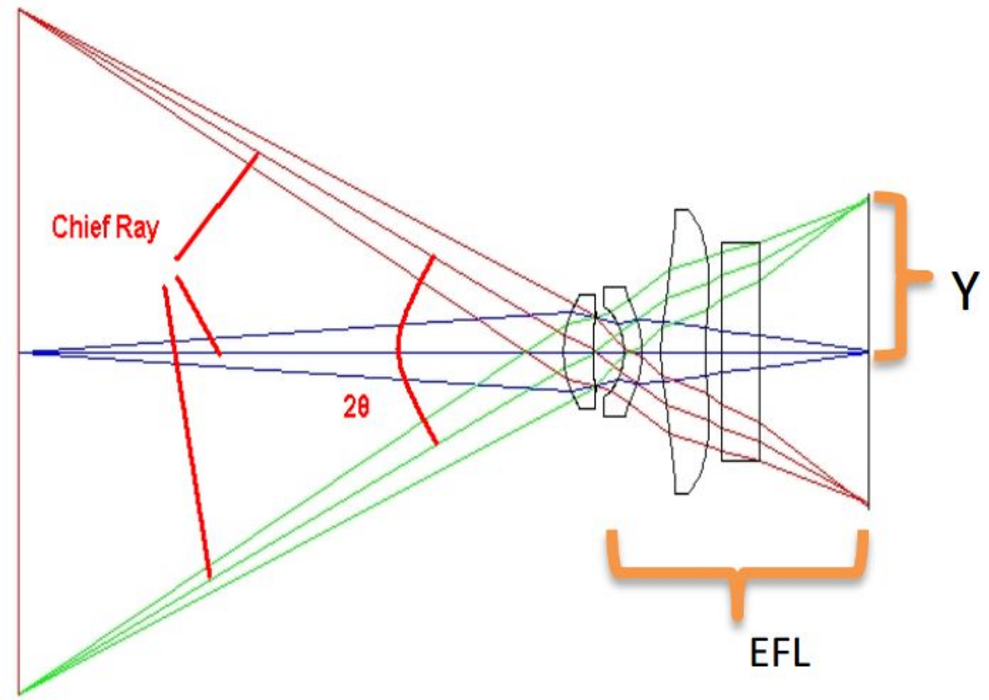
视场角与焦距(EFL)的关系:
若Y为Sensor的半对角线长度,在不考虑光学系统畸变的前提下,对角线视场角(2θ)=2*arctan(Y/EFL),如下图所示:
注:视场角与镜头焦距、Sensor靶面大小和镜头畸变有关:
a.镜头焦距相同的情况下,Sensor靶面越大,视场角越大;
b.Sensor靶面相同的情况下,镜头焦距越小,视场角越大;
c. 镜头焦距和Sensor靶面都相同的情况下,枕形(负)畸变越大,视场角越大。
5、清晰度(Resolution)
定义:分辨率和反差综合表现的结果。
分辨率又称分辨力、解析力、鉴别率、解析度,指的是镜头清晰的再现被摄景物细节的能力,分辨率越高的镜头,拍摄的图像越清晰细腻。
清晰度也可以用像面上镜头在单位MM内能够分辨的线对数表示,单位是LP/MM,能够分辨的线对数越多,代表镜头分辨率越高。如下图所示:

反差即对比度,用来形容图像最亮处和最暗处的差别;用MTF(ModulationTransfer Function调制传递函数)来表示,MTF描述的是光学成像系统对各频率分量对比度的传递特性,如下式所示:
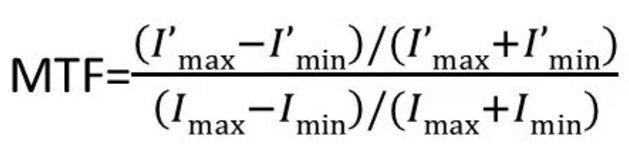
其中I’max和I’min表示像的最大和最小灰度值,Imax和Imin表示物的最大和最小灰度值。
很明显,调制度介于0和1之间,调制度M越高,意味着反差越大;当图像中的最大亮度和最小亮度相等,反差完全消失,此时调制度为0。
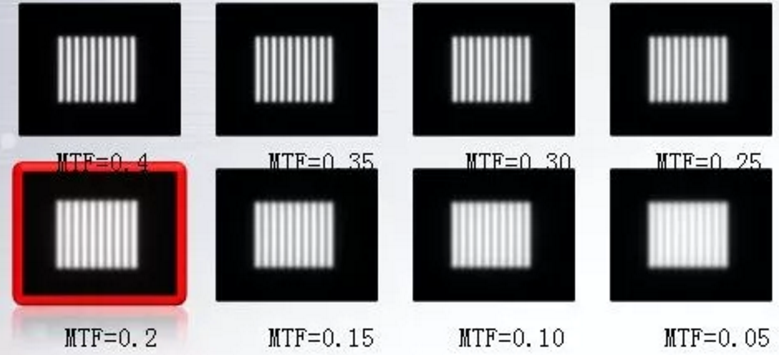
下图为分辨率为10LP/MM,MTF在0.05~0.4之间的对比图片,从下图可以看出,人眼可接受的最小可分辨的MTF数值在0.15~0.2之间。
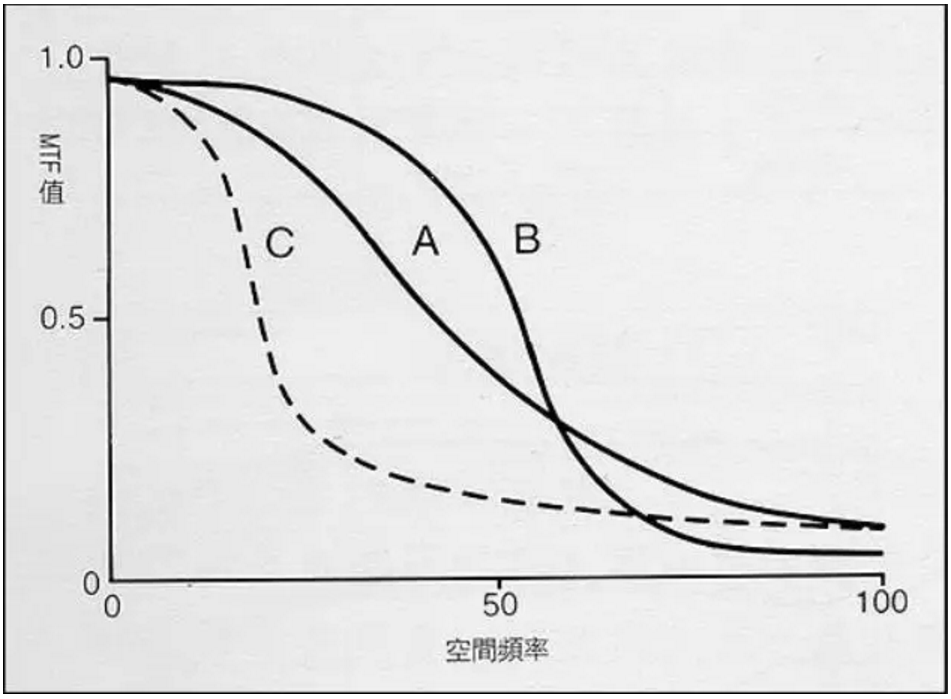
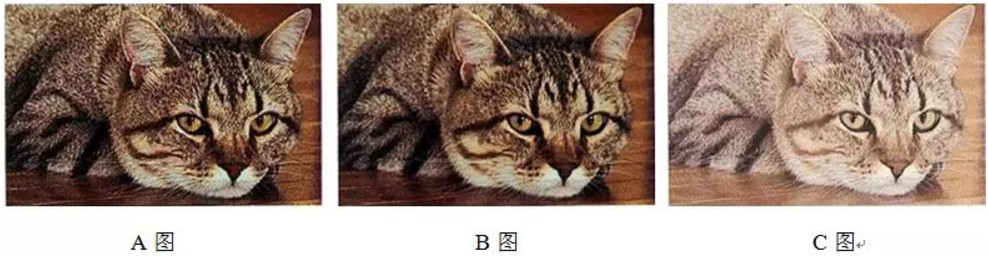
A曲线: 曲线平滑下降,说明图像的解像力和对比度均达到了较好的水平,见A图;
B曲线: 低频率时的MTF值持续很高,说明图像的对比度很好;但是高频率时的MTF很低,说明图像的解像力较差,见B图;
C曲线: 低频率时的MTF值下降较快,说明图像对比度较差;高频时的MTF较B曲线高,说明图像解像力效果比B好,见C图;
6、相对照度(Relative Illumination)
定义:图像边缘亮度与中心亮度的比值。Sensor表面不同位置的照度的大小与该处入射于像面的光线入射角的Cosin四次方成正比。
相对照度<1?
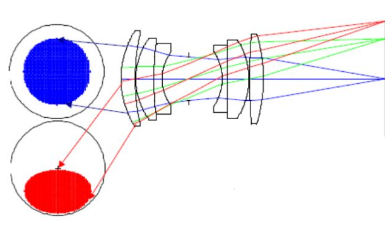
相对照度<1的原因:中心视场与边缘视场的有效通光孔径不同(如左图),造成中心与边缘的亮度差异。
7、景深(Depth of Field)
定义:能够在像平面上呈现清晰的像的物方空间深度范围。
可成清晰像的最远的物平面称为远景平面,它与对准平面的距离成为后景深△L1;能成清晰像的最近物平面称为近景平面,它与对准平面的距离称为前景深△L2;景深=前景深+后景深,如下图所示:

前景深 ΔL1= FδL²/ (f² + FδL)
后景深 ΔL2= FδL²/ (f² - FδL)
景深 ΔL =ΔL1+ΔL2=2f²FδL²/( f 4- F²δ²L²)
δ——容许弥散圆直径
f——镜头焦距
F——镜头的拍摄光圈值
L——对焦距离
ΔL1—— 前景深
ΔL2——后景深
ΔL——景深
由景深计算公式可以看出,景深与镜头使用的F.No 、 f焦距、拍摄距离以及对图像质量的要求(表现为容许弥散圆的大小)有关。
这些主要因素对景深的影响如下(假定其他的条件都不改变):
a. 镜头光圈:
光圈越大,景深越小;光圈越小,景深越大;
b. 镜头焦距:
镜头焦距越长,景深越小;焦距越短,景深越大;
c. 拍摄距离:
距离越远,景深越大;距离越近,景深越小。
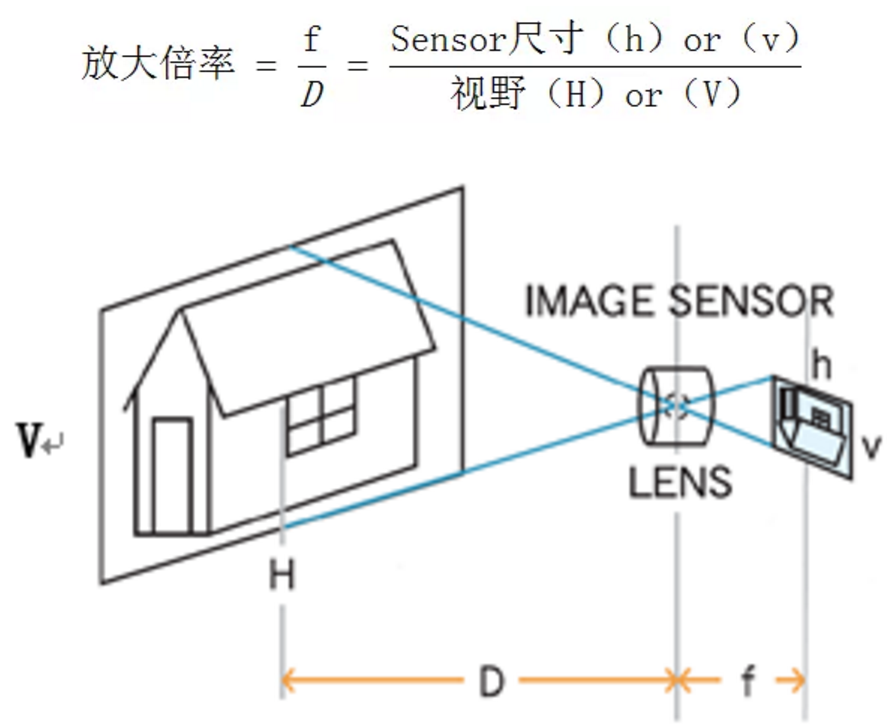
8、放大倍率(Magnification)
定义:像高和物高的大小之比。
放大倍率的计算方法:
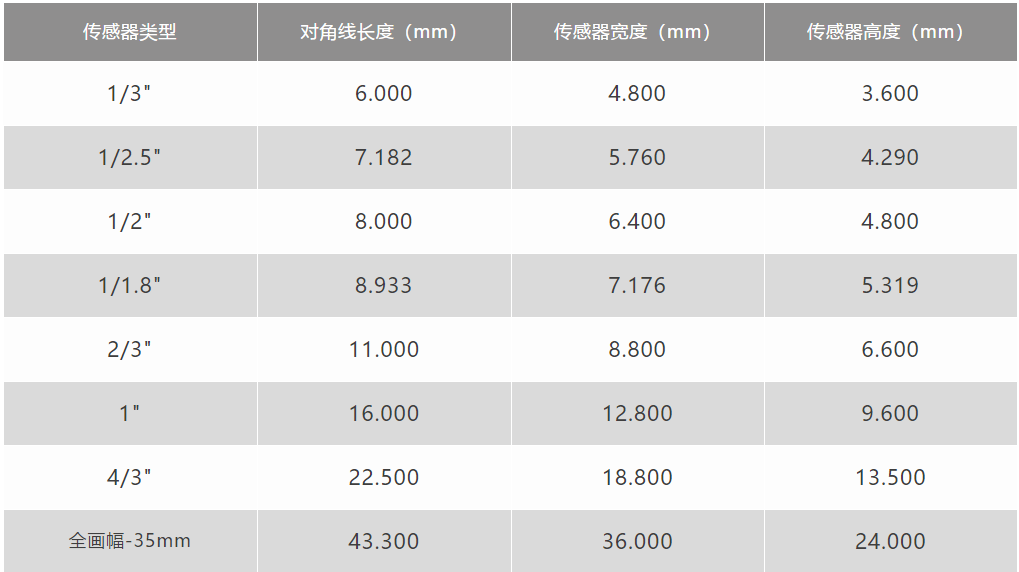
9、靶面大小(Max Image Circle)
定义:感光元器件对角线尺寸。
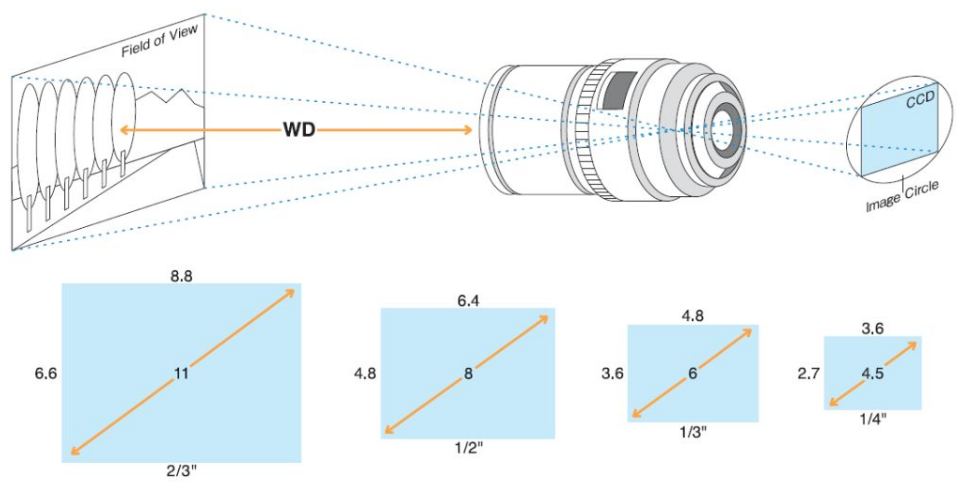
靶面大小示意图
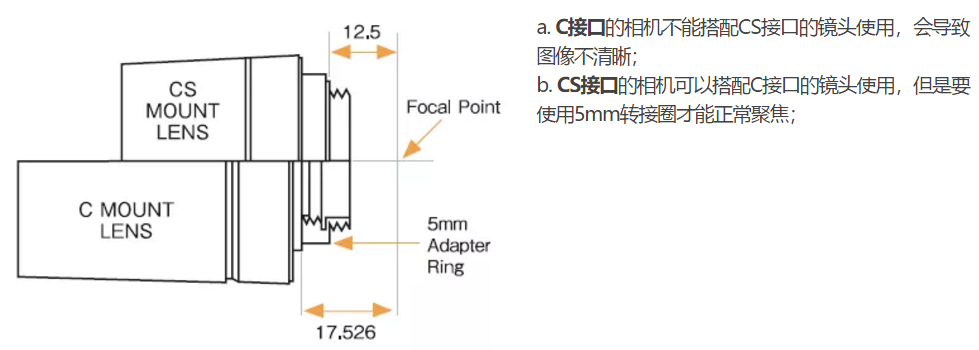
10、镜头接口(Mount)
C接口是工业镜头最为常用的一种接口,其法兰距(法兰面距离感光芯片的距离)为17.526mm,螺纹规格:直径1英寸,螺距1-32UNF;
CS接口是监控行业较为常用的一种接口,其法兰距(法兰面距离感光芯片的距离)为12.526mm,螺纹规格:直径1英寸,螺距1-32UNF;
从下图来直观地了解C接口与CS接口区别:
F接口是一种卡口型接口,法兰距46.5mm,最早由Nikon为其35mm式相机而开发。目前较多的应用在大靶面相机和线扫描相机上,使用此接口,镜头可轻松安装和拆卸;
M接口是一种螺纹接口,通常用于替换较大靶面相机的F接口,由接口直径(42mm、58mm、72mm等)、螺距(0.75mm、1mm等)和法兰距定义,种类较多;
S接口是M接口的一种,规格:螺纹直径12mm,螺距0.5mm。
 End
End
声明:部分内容来源于网络,仅供读者学术交流之目的。文章版权归原作者所有。如有不妥,请联系删除。
