
转向行为! steering behaviors !
寻找 seek 避开 flee 到达 arrive 追逐 purse 躲避 evade 群落 flock !
效果
转向行为旨在通过使用简单的力来帮助自主角色以逼真的方式运动,这些简单的力结合起来可以围绕角色的环境产生逼真的,即兴的导航。它们不是基于涉及路径规划或全局计算的复杂策略,而是使用本地信息,例如邻居的部队。这使它们易于理解和实施,但仍然能够产生非常复杂的运动模式。
群落效果:
追逐偏移:
视频预览[欢迎关注,获得最新研究成果]:
实现
实现转向行为抓住以下两个点:
转向力 周围角色对象
角色类需要包含以下几个基本属性:
位置 速度 转向力
每帧根据合力与加速度,速度与位置的关系,更新位置。
this._steeredForce.multiplyScalar(1 / this.mass)
this.velocity.add(this._steeredForce)
this._steeredForce.set(0, 0)
this._position.add(this.velocity)
每种行为,都会算出有个期望速度,根据这个期望速度算出一个转向力加上去即可。
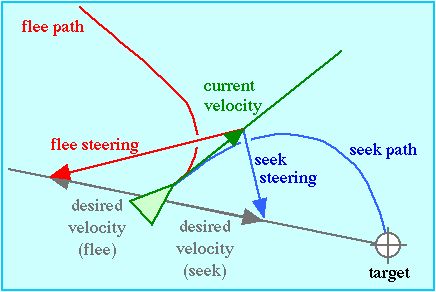
寻找 seek 与 避开 flee
寻找的期望速度直接指向目标点,转向力是期望速度减去当前速度。避开正好相反。
seek(target: Vec2): void {
const desiredVelocity: Vec2 = Vec2.subtract(temp_v2, target, this._position).normalize()
desiredVelocity.multiplyScalar(this.maxSpeed);
const force: Vec2 = desiredVelocity.subtract(this.velocity);
this._steeredForce.add(force);
}
flee(target: Vec2): void {
const desiredVelocity: Vec2 = Vec2.subtract(temp_v2, target, this._position).normalize()
desiredVelocity.multiplyScalar(this.maxSpeed);
const force: Vec2 = desiredVelocity.subtract(this.velocity);
this._steeredForce.subtract(force);
}
到达 arrive
与寻找的期望速度类似,方向是一样的,区别是快到的时候速度会减少。
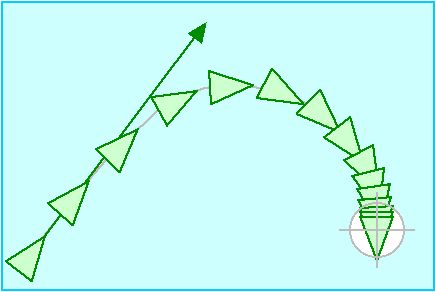
可以加一个距离控制,在还没达到这个距离时,先以最快的速度过去,比较近的时候减缓速度。
arrive(target: Vec2): void {
const desiredVelocity: Vec2 = Vec2.subtract(temp_v2, target, this._position).normalize()
const dist: number = Vec2.distance(this._position, target)
if (dist > this.arrivalThreshold) {
desiredVelocity.multiplyScalar(this.maxSpeed);
} else {
desiredVelocity.multiplyScalar(this.maxSpeed * dist / this.arrivalThreshold);
}
const force: Vec2 = desiredVelocity.subtract(this.velocity);
this._steeredForce.add(force);
}
追逐 purse 与 躲避 evade
追逐与躲避会预测目标将会移动到的位置,最后再调用寻找和避开。
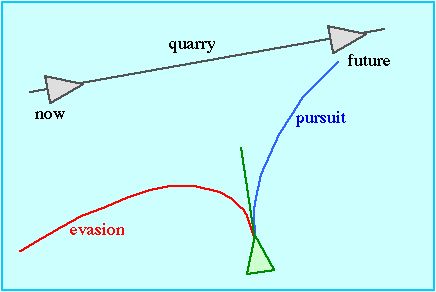
其中,追逐时,如果刚好在正前方,就不用预测目标移动的位置,直接飞过去就好。
pursue(target: Vehicle): void {
const toTarget = Vec2.subtract(temp_v2, target.position, this._position)
if (toTarget.dot(this.heading) > 0 && this.heading.dot(target.heading) < -0.95) {
// 如果面对面,正好在前面,就直接飞过去
this.seek(target.position)
} else {
const lookAheadTime: number = Vec2.distance(this._position, target.position) / (this.maxSpeed + target.velocity.length());
const predictedTarget: Vec2 = Vec2.add(temp2_v2, target.position, Vec2.multiplyScalar(temp_v2, target.velocity, lookAheadTime));
this.seek(predictedTarget)
}
}
evade(target: Vehicle): void {
const lookAheadTime: number = Vec2.distance(this._position, target.position) / (this.maxSpeed + target.velocity.length())
const predictedTarget: Vec2 = Vec2.add(temp2_v2, target.position, Vec2.multiplyScalar(temp_v2, target.velocity, lookAheadTime));
this.flee(predictedTarget)
}
追逐偏移 pursueOffset
追逐偏移使得角色之间保持指定位置的偏移。
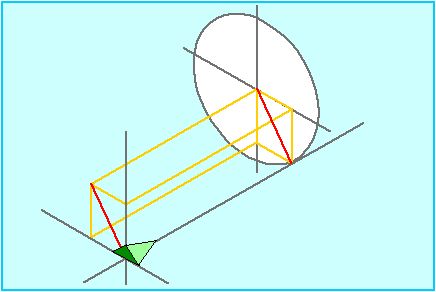
先初始算出偏移位置,再算偏移预期位置,最后调用到达。
pursueOffset(target: Vehicle, offset: Vec2): void {
const localOffset = temp_v2.set(
target.side.x * offset.x + target.side.y * offset.y,
target.heading.x * offset.x + target.heading.y * offset.y
)
const offsetTargetPos = Vec2.add(temp_v2, target.position, localOffset)
const lookAheadTime: number = Vec2.distance(this._position, offsetTargetPos) / (this.maxSpeed + target.velocity.length())
const predictedTarget: Vec2 =
Vec2.add(
temp2_v2,
offsetTargetPos,
Vec2.multiplyScalar(temp2_v2, target.velocity, lookAheadTime),
);
this.arrive(predictedTarget)
}
群落 flock
群落行为是由分离、凝聚和队列组成。
分离(separation):每个角色都试着和相邻角色保持一定的距离。 凝聚(cohesion):每个角色尽量不掉队,不落下太远。 队列(alignment):每个角色尽可能与相邻角色行动于同一方向。
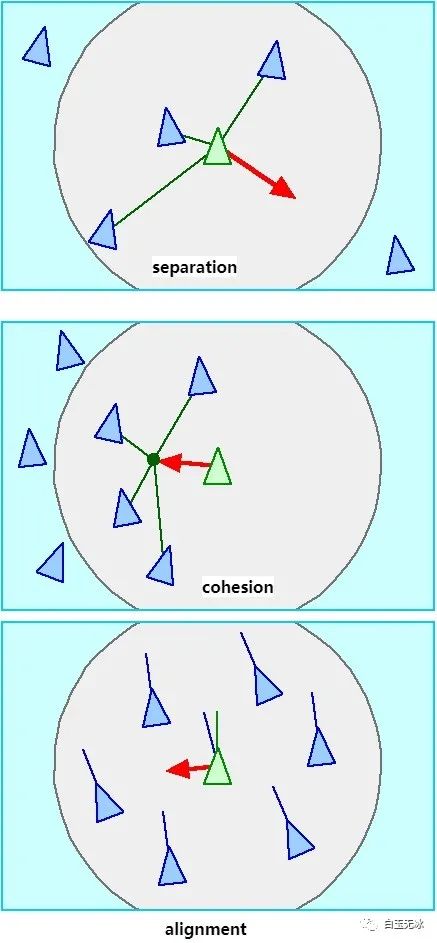
近了就离开,在一定范围内就靠近,速度取平均值。
flock(vehicles: Vehicle[]): void {
let averageVelocity: Vec2 = temp3_v2.set(this.velocity)
let averagePosition: Vec2 = temp4_v2.set(0, 0)
let inSightCount = 0;
for (let i = 0; i < vehicles.length; i++) {
let vehicle: Vehicle = vehicles[i] as Vehicle;
if (vehicle != this && this.inSight(vehicle)) {
averageVelocity = averageVelocity.add(vehicle.velocity);
averagePosition = averagePosition.add(vehicle.position);
if (Vec2.squaredDistance(this.position, vehicle.position) < this.tooCloseDist * this.tooCloseDist) this.flee(vehicle.position);
inSightCount++;
}
}
if (inSightCount > 0) {
averageVelocity.multiplyScalar(1 / inSightCount);
averagePosition.multiplyScalar(1 / inSightCount);
this.seek(averagePosition);
const force = averageVelocity;
this._steeredForce.subtract(force);
}
}
小结
转向行为的实现可分解为模拟各个行为的力,再计算合力,接着算加速度和速度,最后更新位置!
以上为白玉无冰使用 Cocos Creator 3.1.0 实现 "转向行为!" 的技术分享。
Cocos Store 链接: http://store.cocos.com/app/detail/2893
参考资料
https://www.red3d.com/cwr/steer/
《Flash ActionScript 3.0 动画高级教程》
《游戏人工智能编程案例精粹》
keep hungry! keep foolish!
更多
折纸效果
竖直布局的文本
弹性跟随相机!
标志板!
2D 素材 3D 效果!
2020 原创精选!
更多精彩欢迎关注微信公众号