基于opencv对高空拍摄视频消抖处理
点击下面卡片关注“AI算法与图像处理”,选择加"星标"或“置顶”
重磅干货,第一时间送达
来源:https://luzhimin.blog.csdn.net/article/details/114523558
编辑:AI算法与图像处理
一、问题背景
无人机在拍摄视频时,由于风向等影响因素,不可避免会出现位移和旋转,导致拍摄出的画面存在平移和旋转的帧间变换, 即“抖动” 抖动会改变目标物体 (车辆、行人) 的坐标,给后续的检测、跟踪任务引入额外误差,造成数据集不可用。
原效果

目标效果
理想的无抖动视频中,对应于真实世界同一位置的背景点在不同帧中的坐标应保持一致,从而使车辆、行人等目标物体的坐标变化只由物体本身的运动导致,而不包含相机的运动 抖动可以由不同帧中对应背景点的坐标变换来描述
二、量化指标
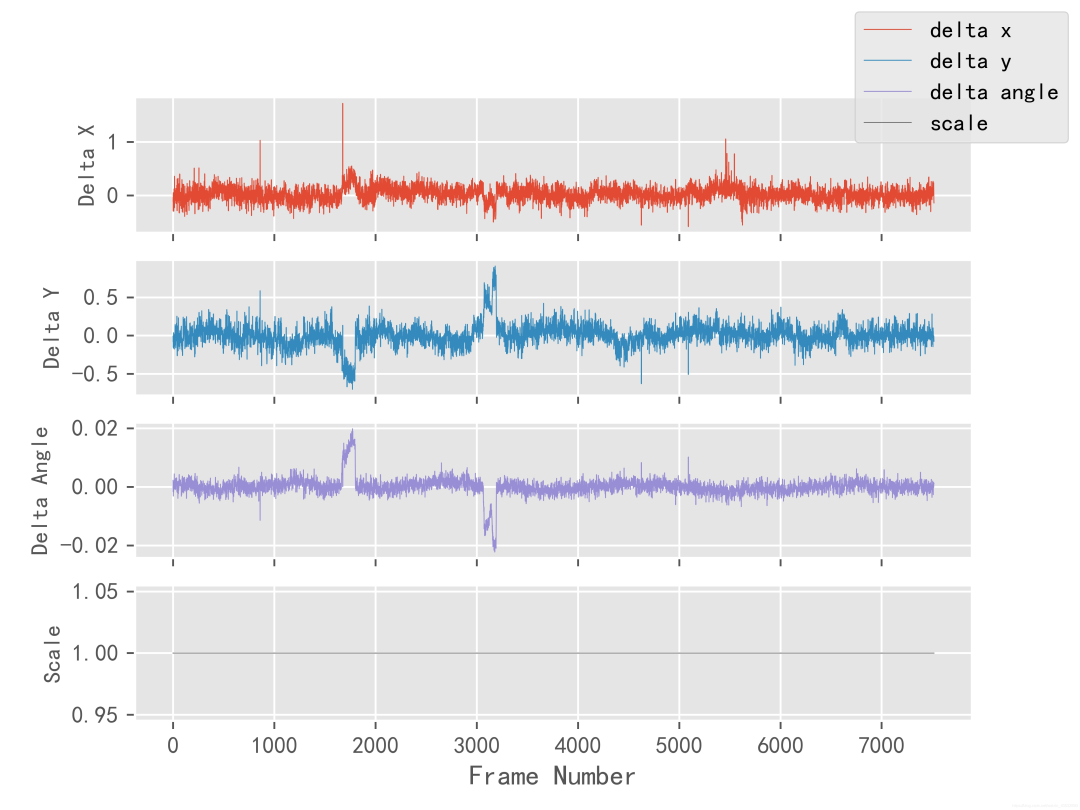
抖动可以用相邻帧之间的 x 方向平移像素 dx,y 方向平移像素 dy,旋转角度 da,缩放比例 s 来描述,分别绘制出 4 个折线图,根据折线图的走势可以判断抖动的程度 理想的无抖动视频中,dx、dy、da 几乎始终为 0,s 几乎始终为 1。
三、技术思路
我们最终实现,将视频的所有帧都对齐到第一帧,以达到视频消抖问题,实现逻辑如下图所示。
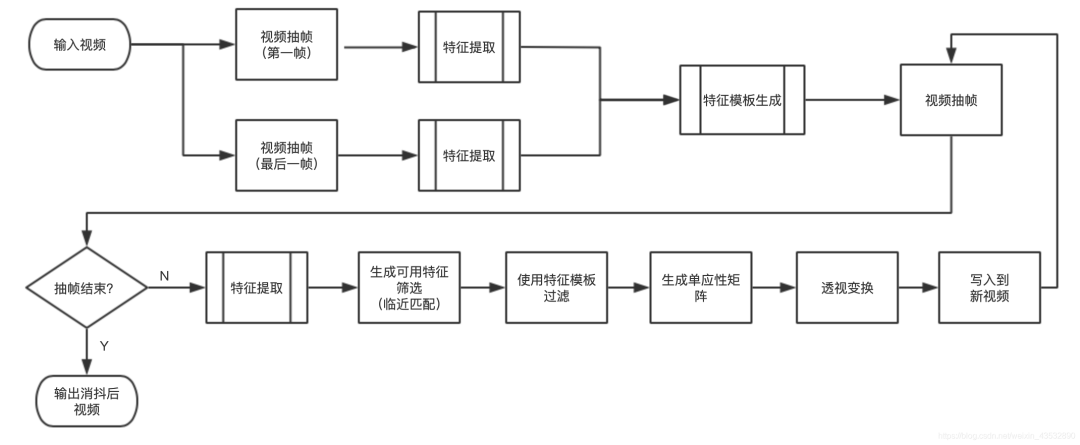
(1)首先对视频进行抽第一帧与最后一帧,为什么抽取两帧?这样做的主要目的是,我们在做帧对齐时,使用帧中静态物的关键点做对齐,如果特征点来源于动态物上,那么对齐后就会产生形变,我们选取第一帧与最后一帧,提取特征点,留下交集部分,则可以得到静态特征点我们这里称为特征模板,然后将特征模板应用到每一帧上,这样可以做有效对齐。
(2)常用特征点检测器:
SIFT: 04 年提出,广泛应用于各种跟踪和识别算法,表现能力强,但计算复杂度高。
SURF: 06 年提出,是 SIFT 的演进版本,保持强表现能力的同时大大减少了计算量。
BRISK: BRIEF 的演进版本,压缩了特征的表示,提高了匹配速度。ORB: 以速度著称,是 SURF 的演进版本,多用于实时应用。
GFTT: 最早提出的 Harris 角点的改进版本,经常合称为 Harris-Shi-Tomasi 角点。
SimpleBlob: 使用 blob 的概念来抽取图像中的特征点,相对于角点的一种创新。FAST: 相比其他方法特征点数量最多,但也容易得到距离过近的点,需要经过 NMS。
Star: 最初用于视觉测距,后来也成为一种通用的特征点检测方法。
我们这里使用的是SURF特征点检测器

第一帧特特征点提取

最后一帧特征点提取
(3)在上图中,我们发现所提取的特征点中部分来自于车身,由于车是运动的,所以我们不能使用,我们用第一帧与最后一帧做静态特帧点匹配,生成静态特征模板,在下图中,我们发现只有所有的特征点只选取在静态物上

静态特征点模板
(4)静态特征模板匹配 ,我们这里使用Flann算法,匹配结果如下
特征匹配
(5)使用匹配成功的两组特征点,估计两帧之间的透视变换 (Perspective Transformation)。估计矩阵 H,其中 (x_i, y_i) 和 (x_i^′, y_i^′) 分别是两帧的特征点。
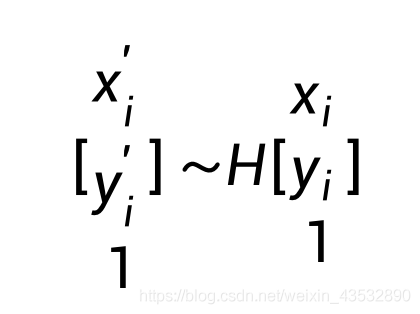
第一帧

最后一帧对齐到第一帧
四、实现代码
代码基于python实现,如下所示
import cv2import timeimport numpy as npimport osclass Stable:# 处理视频文件路径__video_path = None# surf 特征提取__surf = {# surf算法'surf': None,# 提取的特征点'kp': None,# 描述符'des': None,# 过滤后的特征模板'template_kp': None}# capture__capture = {# 捕捉器'cap': None,# 视频大小'size': None,# 视频总帧'frame_count': None,# 视频帧率'fps': None,'video': None}# 配置__config = {# 要保留的最佳特征的数量'key_point_count': 5000,# Flann特征匹配'index_params': dict(algorithm=0, trees=5),'search_params': dict(checks=50),'ratio': 0.5,'frame_count': 9999}# 当前处理帧数__current_frame = 0# 需要处理帧数__handle_count = 0# 处理时间__handle_timer = {'init': 0,'handle': 0,'read': 0,'key': 0,'matrix': 0,'flann': 0,'perspective': 0,'write': 0,'other': 0,}# 帧队列__frame_queue = None# 需要写入的帧队列__write_frame_queue = None# 特征提取列表__surf_list = []def __init__(self):pass# 初始化capturedef __init_capture(self):self.__capture['cap'] = cv2.VideoCapture(self.__video_path)self.__capture['size'] = (int(self.__capture['cap'].get(cv2.CAP_PROP_FRAME_WIDTH)),int(self.__capture['cap'].get(cv2.CAP_PROP_FRAME_HEIGHT)))self.__capture['fps'] = self.__capture['cap'].get(cv2.CAP_PROP_FPS)self.__capture['video'] = cv2.VideoWriter(self.__video_path.replace('.', '_stable.'),cv2.VideoWriter_fourcc(*"mp4v"),self.__capture['fps'],self.__capture['size'])self.__capture['frame_count'] = int(self.__capture['cap'].get(cv2.CAP_PROP_FRAME_COUNT))self.__handle_count = min(self.__config['frame_count'], self.__capture['frame_count'])# 初始化surfdef __init_surf(self):st = time.time()self.__capture['cap'].set(cv2.CAP_PROP_POS_FRAMES, 0)state, first_frame = self.__capture['cap'].read()self.__capture['cap'].set(cv2.CAP_PROP_POS_FRAMES, self.__capture['frame_count'] - 20)state, last_frame = self.__capture['cap'].read()self.__surf['surf'] = cv2.xfeatures2d.SURF_create(self.__config['key_point_count'], 1, 1, 1, 1)# nfeatures:默认为0,要保留的最佳特征的数量。特征按其分数排名(在SIFT算法中按局部对比度排序)# nOctaveLayers:默认为3,金字塔每组(Octave)有多少层。3是D. Lowe纸中使用的值。# contrastThreshold:默认为0.04,对比度阈值,用于滤除半均匀(低对比度)区域中的弱特征。阈值越大,检测器产生的特征越少。# edgeThreshold:默认为10,用来过滤边缘特征的阈值。注意,它的意思与contrastThreshold不同,edgeThreshold越大,滤出的特征越少(保留更多特征)。# sigma:默认为1.6,高斯金字塔中的σ。如果使用带有软镜头的弱相机拍摄图像,则可能需要减少数量。self.__surf['kp'], self.__surf['des'] = self.__surf['surf'].detectAndCompute(first_frame, None)kp, des = self.__surf['surf'].detectAndCompute(last_frame, None)# 快速临近匹配flann = cv2.FlannBasedMatcher(self.__config['index_params'], self.__config['search_params'])matches = flann.knnMatch(self.__surf['des'], des, k=2)good_match = []for m, n in matches:if m.distance < self.__config['ratio'] * n.distance:good_match.append(m)self.__surf['template_kp'] = []for f in good_match:self.__surf['template_kp'].append(self.__surf['kp'][f.queryIdx])self.__capture['cap'].set(cv2.CAP_PROP_POS_FRAMES, 0)self.__handle_timer['init'] = int((time.time() - st) * 1000)print("[INFO] init time:{}ms".format(self.__handle_timer['init']))# 初始化 队列def __init_data(self):pass# 初始化def __init(self):self.__init_capture()self.__init_surf()self.__init_data()# 处理def __process(self):self.__current_frame = 1while True:if self.__current_frame > self.__handle_count:breakstart_time = time.time()# 抽帧success, frame = self.__capture['cap'].read()self.__handle_timer['read'] = int((time.time() - start_time) * 1000)if not success: return# 计算frame = self.detect_compute(frame)# 写帧st = time.time()self.__capture['video'].write(frame)self.__handle_timer['write'] = int((time.time() - st) * 1000)self.__handle_timer['handle'] = int((time.time() - start_time) * 1000)self.__current_frame += 1self.print_handle_time()# 视频稳像def stable(self, path):self.__video_path = pathself.__init()self.__process()# 打印耗时def print_handle_time(self):print("[INFO] handle frame:{}/{} time:{}ms(read:{}ms key:{}ms flann:{}ms matrix:{}ms perspective:{}ms write:{}ms)".format(self.__current_frame,self.__handle_count,self.__handle_timer['handle'],self.__handle_timer['read'],self.__handle_timer['key'],self.__handle_timer['flann'],self.__handle_timer['matrix'],self.__handle_timer['perspective'],self.__handle_timer['write']))# 特征点提取def detect_compute(self, frame):frame_gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)# 计算特征点st = time.time()kp, des = self.__surf['surf'].detectAndCompute(frame_gray, None)self.__handle_timer['key'] = int((time.time() - st) * 1000)# 快速临近匹配st = time.time()flann = cv2.FlannBasedMatcher(self.__config['index_params'], self.__config['search_params'])matches = flann.knnMatch(self.__surf['des'], des, k=2)self.__handle_timer['flann'] = int((time.time() - st) * 1000)# 计算单应性矩阵st = time.time()good_match = []for m, n in matches:if m.distance < self.__config['ratio'] * n.distance:good_match.append(m)p1, p2 = [], []for f in good_match:# 存在与模板特征点中if self.__surf['kp'][f.queryIdx] in self.__surf['template_kp']:p1.append(self.__surf['kp'][f.queryIdx].pt)p2.append(kp[f.trainIdx].pt)H, _ = cv2.findHomography(np.float32(p2), np.float32(p1), cv2.RHO)self.__handle_timer['matrix'] = int((time.time() - st) * 1000)# 透视变换st = time.time()output_frame = cv2.warpPerspective(frame, H, self.__capture['size'], borderMode=cv2.BORDER_REPLICATE)self.__handle_timer['perspective'] = int((time.time() - st) * 1000)return output_frames = Stable()s.stable('video/test10.mov')
五、效果展示
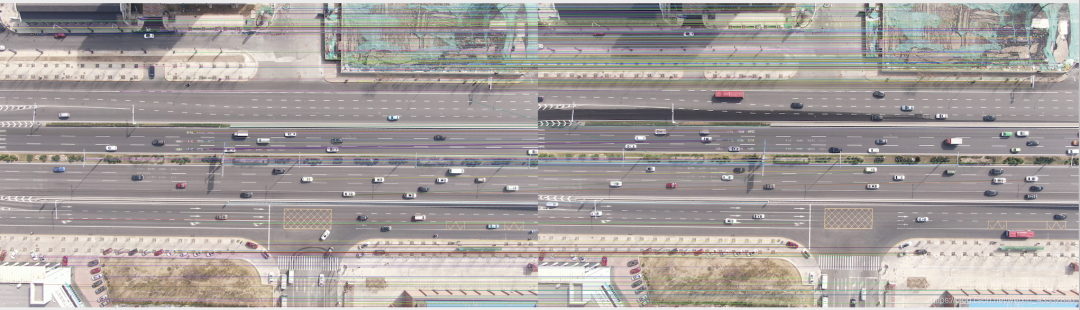
我们消抖后的视频道路完全没有晃动,但是在边界有马赛克一样的东西,那是因为图片对齐后后出现黑边,我们采用边缘点重复来弥补黑边。
消抖前
消抖后
六、效率优化
目前的处理效率(原视频尺寸3840*2160),我们可以看出主要时间是花费在特征点(key)提取上。
可以采用异步处理+GPU提高计算效率
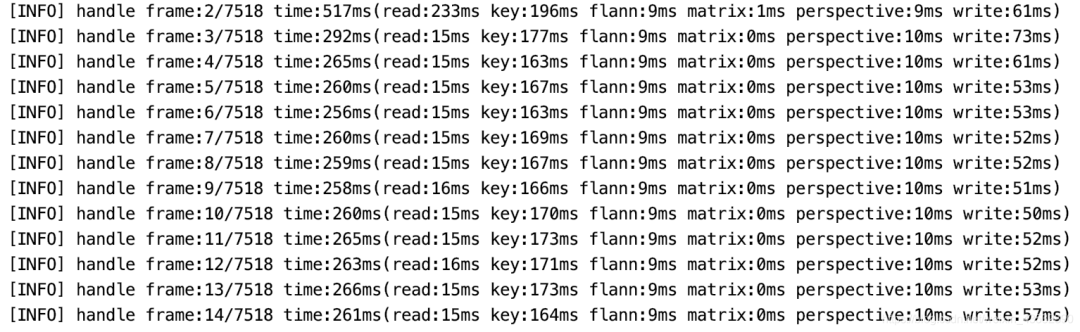
处理效率
七、存在问题
目前存在的问题 还不能完全消除视频中的所有抖动
(1)尤其是对于原来的抖动比较剧烈的视频,目前只能去除大部分明显抖动;
(2)由于画面旋转造成的边缘画面缺失,目前采取了复制边缘点 (replicate) 的操作,是否会对数据集的使用造成影响还需要进行实验。
改进思路
(1)对于抖动问题,计划通过调整关键点检测器参数、尽可能过滤掉运动物体的特征点、调整特征点匹配参数来解决;
(2)对于边缘画面缺失问题,可以使用基于 CNN 的图像修复算法,尽可能让缺失的边缘表现得更自然 后续进一步增加运动平滑等算法,实现对整体运动的进一步平滑。
个人微信(如果没有备注不拉群!)
请注明:地区+学校/企业+研究方向+昵称
下载1:何恺明顶会分享
在「AI算法与图像处理」公众号后台回复:何恺明,即可下载。总共有6份PDF,涉及 ResNet、Mask RCNN等经典工作的总结分析
下载2:终身受益的编程指南:Google编程风格指南
在「AI算法与图像处理」公众号后台回复:c++,即可下载。历经十年考验,最权威的编程规范!
下载3 CVPR2021
在「AI算法与图像处理」公众号后台回复:CVPR,即可下载1467篇CVPR 2020论文 和 CVPR 2021 最新论文
点亮  ,告诉大家你也在看
,告诉大家你也在看