
「 工业缺陷检测深度学习方法」最新2022研究综述
导读
基于深度学习的工业缺陷检测方法在各种生产与运维场景中扮演着重要角色。本文将对工业缺陷检测的任务定义、难点、挑战、主流方法、公共数据集及评价指标等进行全面归纳, 并总结出方法部署中的关键辅助技术。
引言
2 问题定义与研究现状
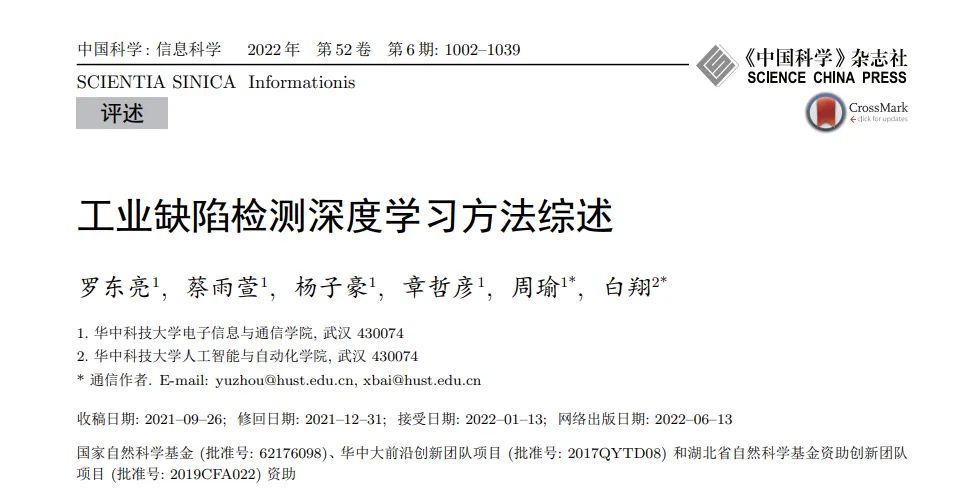
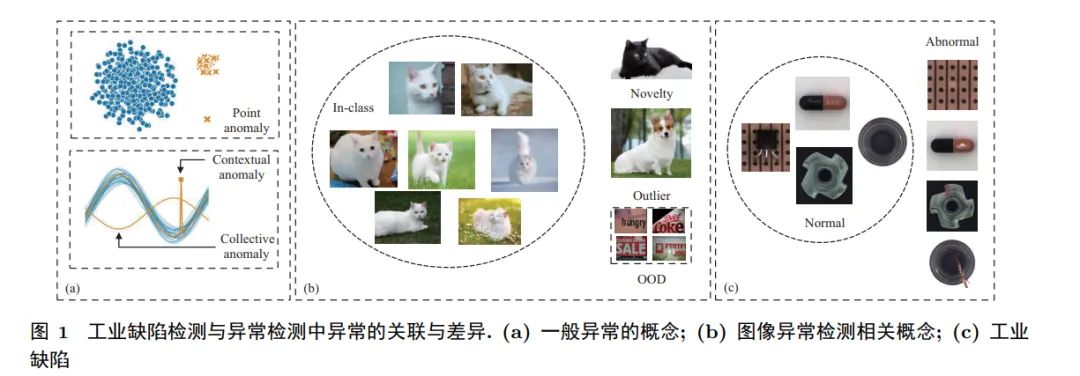
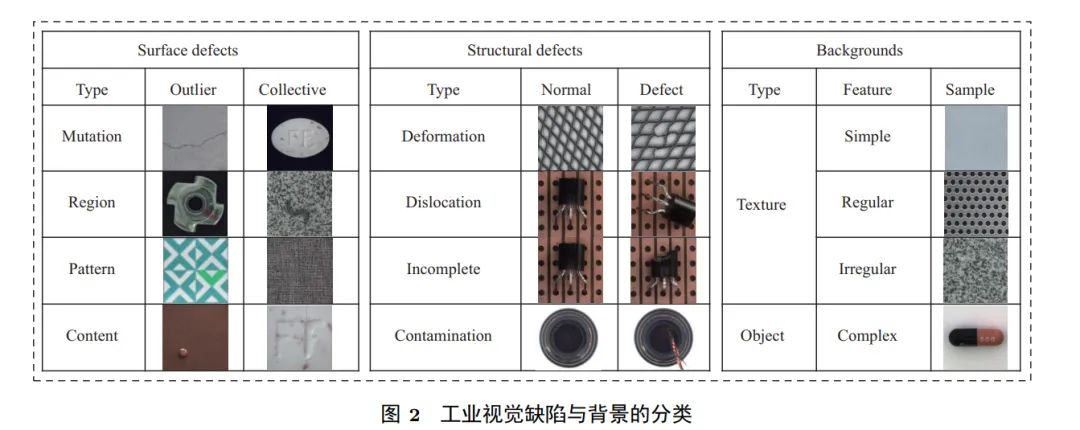
2.1 问题定义
2.2 研究概述
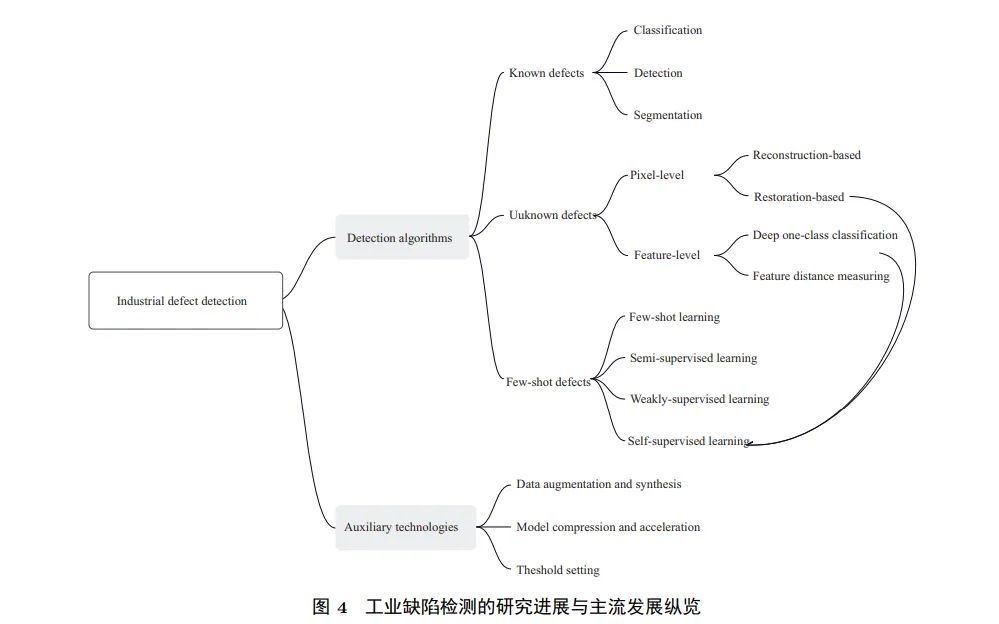
3 检测算法
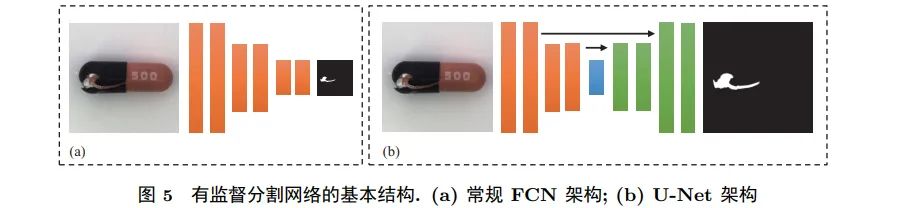
3.1 缺陷模式已知
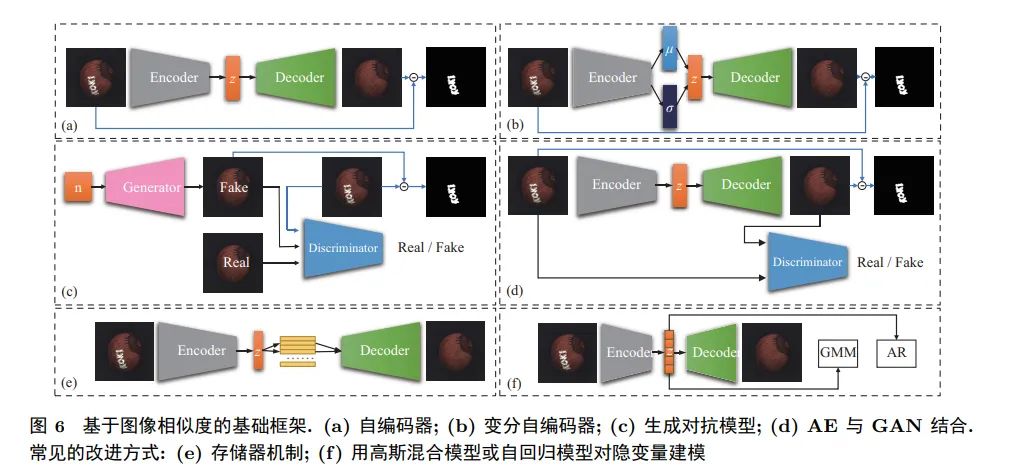
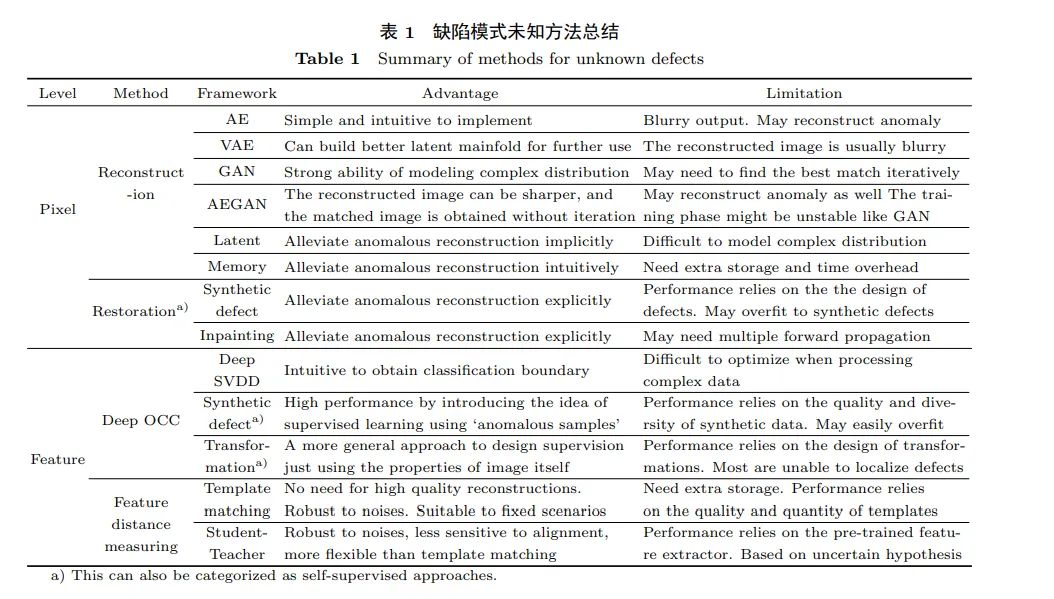
3.2 缺陷模式未知
3.3 少量缺陷标注
4 辅助技术
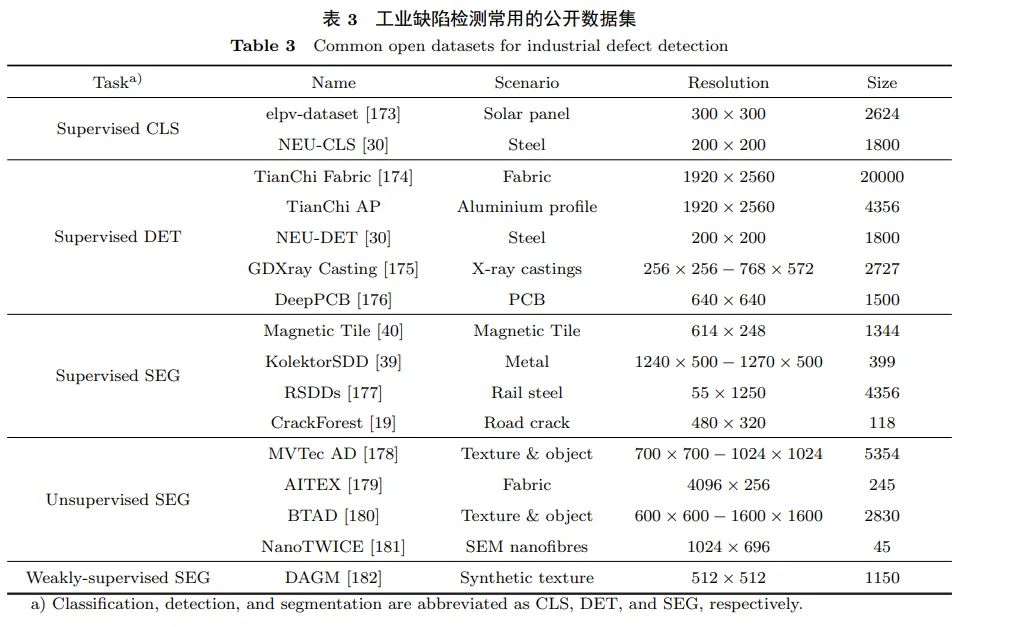
5 数据集与性能评估
5.1 常用数据集
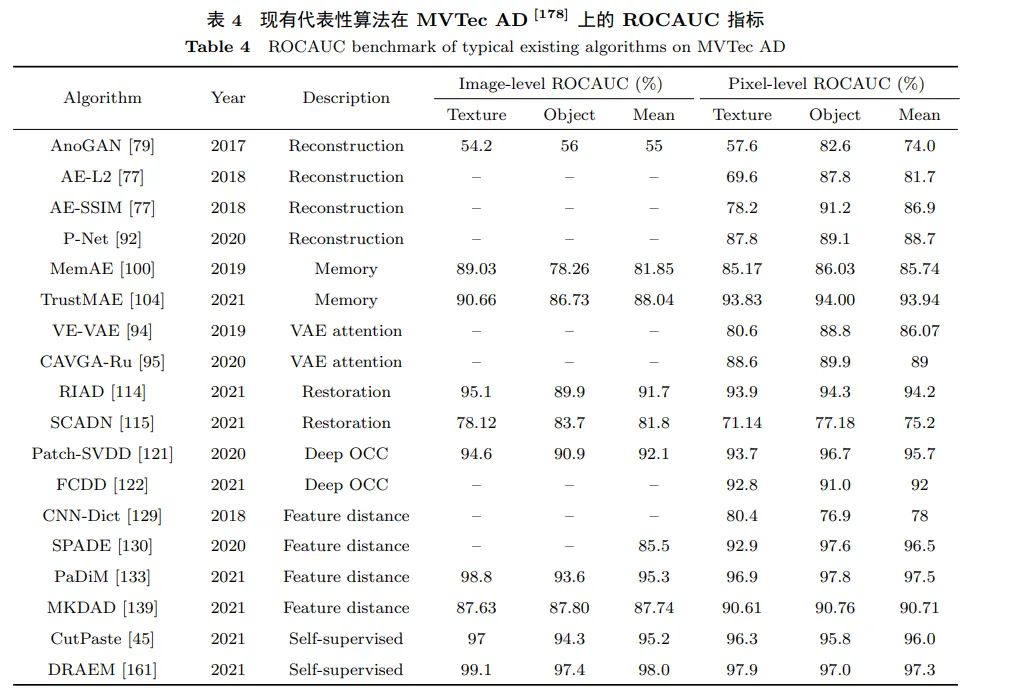
5.2 评价指标
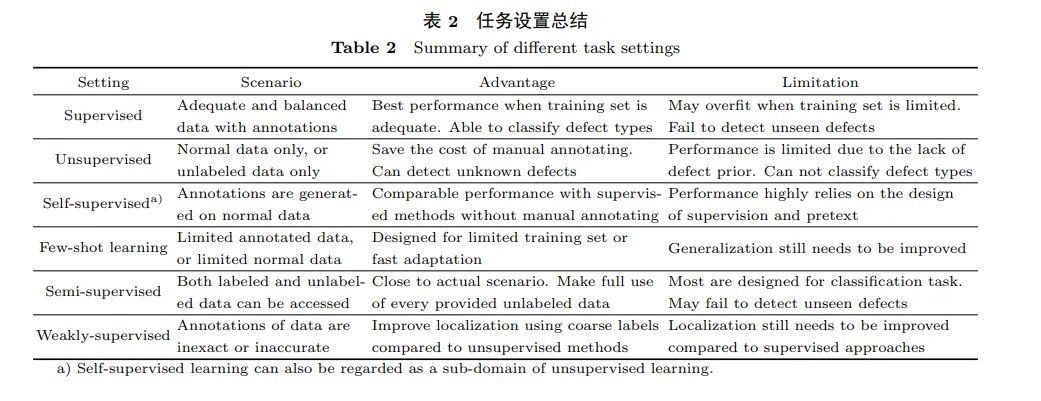
6 总结与展望
6.1 总结
6.2 展望
评论