
一个神奇的开源项目:让照片快速 3D 化!
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达


拿起以往的老照片,无一不是灰蒙蒙的。那么有没有一种方法将这些老照片重焕生机呢? 近日,弗吉尼亚理工等机构开发出了一种语境感知分层深度修复技术,它利用基于学习的修复模型来迭代地合成新的颜色和深度信息,并借助标准图形引擎将这些老照片渲染成 3D 照片。
论文地址:https://arxiv.org/pdf/2004.04727.pdf
项目地址:https://github.com/vt-vl-lab/3d-photo-inpainting
网站地址:https://shihmengli.github.io/3D-Photo-Inpainting/
Colab 地址:https://colab.research.google.com/drive/1706ToQrkIZshRSJSHvZ1RuCiM__YX3Bz
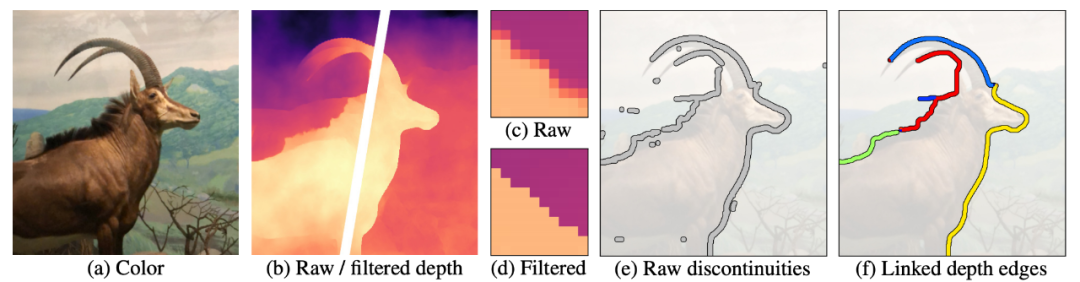
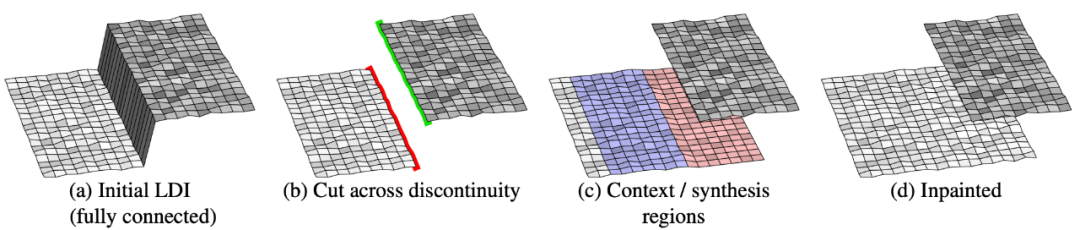
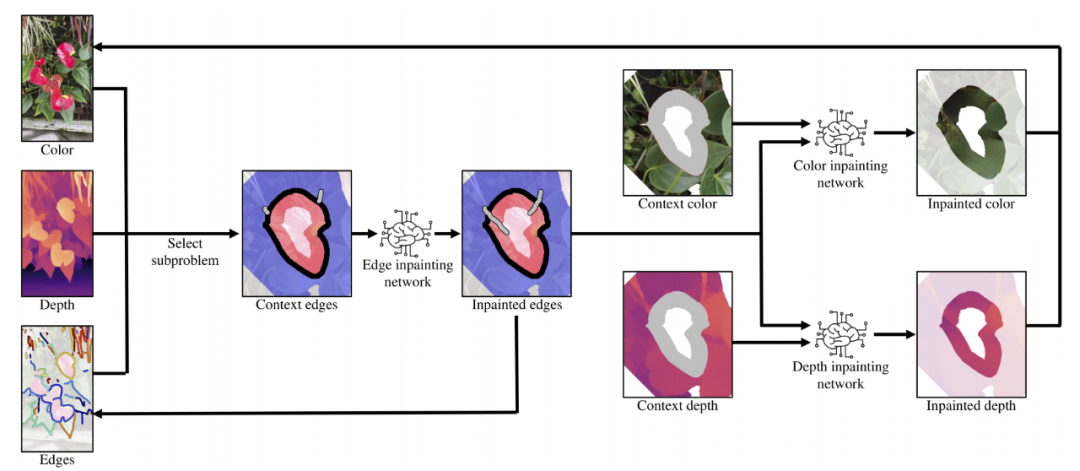
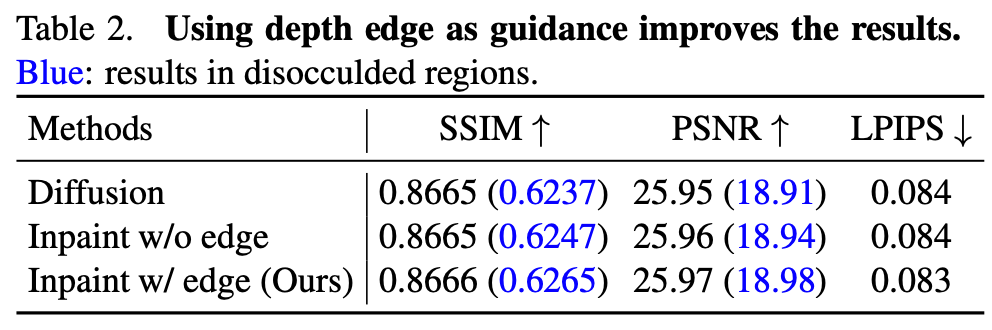
图像预处理:首先初始化 LDI,LDI 使用单个层,且完全 4-connected。在预处理过程中,检测主要的深度不连续区域,并将它们分为简单的连接深度边缘(connected depth edge)。这构成了主算法的基础,该算法的核心部分式迭代地选择深度边缘进行修复;
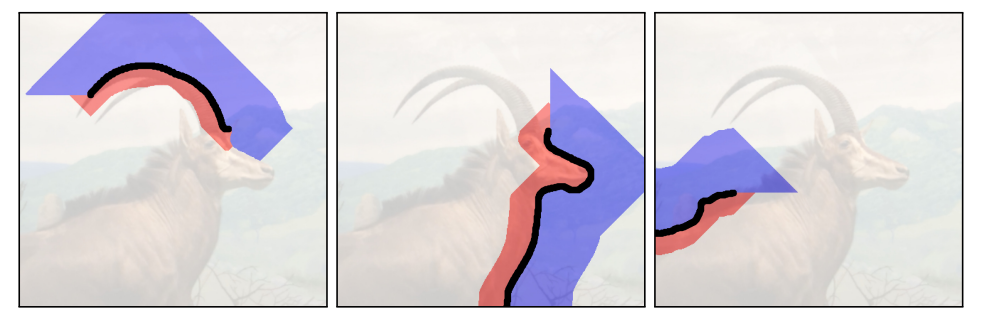
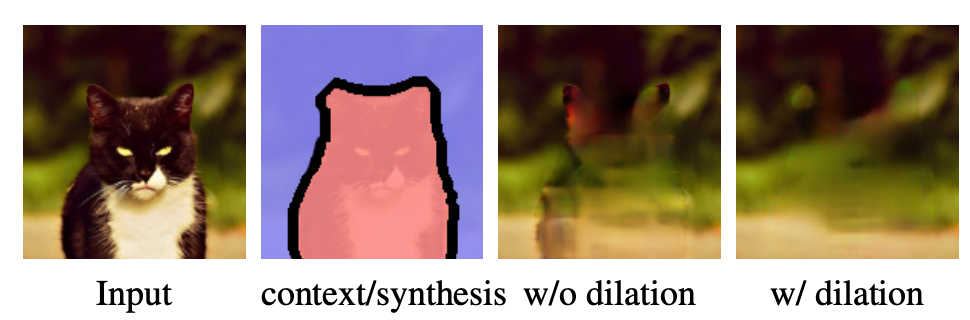
语境和合成区域:断开边缘上的 LDI 像素,只修复边缘的背景像素。具体做法是从边缘的「已知」侧提取局部语境区域,在「未知」侧生成合成区域;
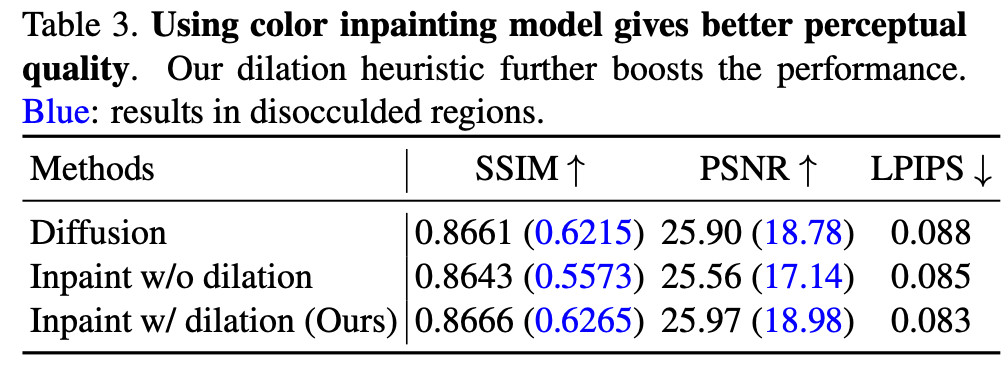
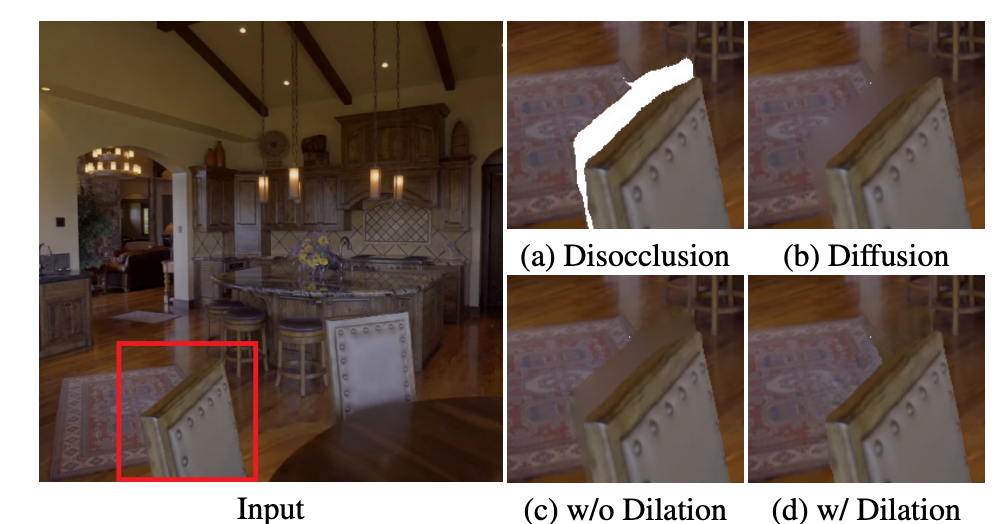
语境感知的颜色和深度修复:合成区域是新像素的连续 2D 区域,研究者使用基于学习的方法从给定语境中为其生成颜色和深度值;
形成 3D 纹理网格:修复完成后,将合成像素合并到 LDI 像素。
该方法按照以上流程迭代进行,直到所有深度边缘都得到处理。
Linux (已在 Ubuntu 18.04.4 LTS 上测试)
Anaconda
Python 3.7 (已在 3.7.4 上测试)
PyTorch 1.4.0 (已在 1.4.0 测试执行)
运行以下命令
conda create -n 3DP python=3.7 anacondaconda activate 3DPpip install -r requirements.txtconda install pytorch==1.4.0 torchvision==0.5.0 cudatoolkit==10.1.243 -c pytorch
下载模型权重
chmod +x download.sh./download.sh
将 .jpg 文件 (e.g., test.jpg) 放入 image 文件夹中.
如 image/moon.jpg
运行:
python main.py --config argument.yml
通常情况下处理时间为 2-3 分钟,具体取决于可用的计算资源。
将结果存储再以下目录中:
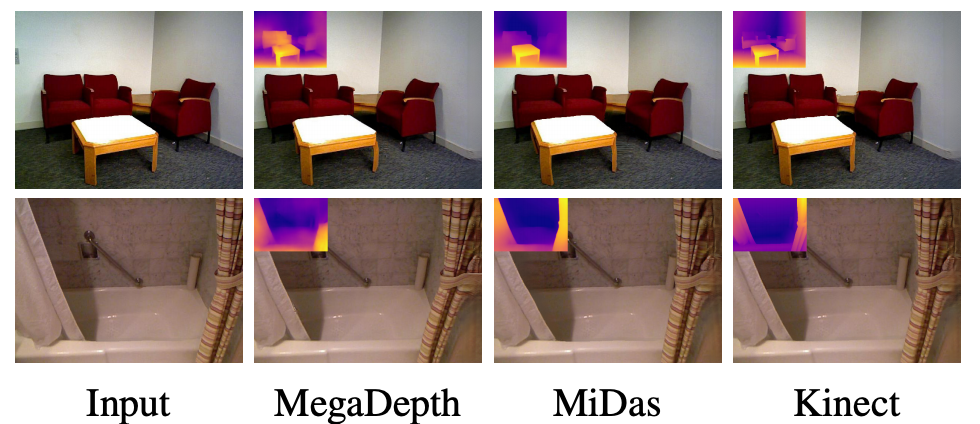
MiDas 估算的对应深度 tu
如 depth/moon.npy
3D 网格
如 mesh/moon.ply
具有放大效果的渲染视频
如 video/moon_zoom-in.mp4
具有摆动效果的渲染 shi'p
如 video/moon_swing.mp4
渲染视频并进行 circle motion
如 video/moon_circle.mp4
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~