
机器视觉之照明基础
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达


很多关于机器视觉的最新消息都是关于机器学习和算法方面的创新。但这些算法需要数据才能正确执行,这里的数据即是图像。捕获尽可能最好的图像是必要的,这样算法可以在他们的最高水平上执行。
图像噪声与信号
实体成像首先要确定图像中的信号(有用信息)与噪声(无关或无用的信息)之间的差异,然后使用技术通过创建对比度来突出显示前者。
创建对比度需要理解机器视觉的信息流。首先,光源散射在物体上,成像仪收集这些光形成数字图像。只有这样,软件才能开始提取图像中的特征(线条、边缘、文本),以提供有用的信息(尺寸、零件ID)并做出决定(通过、失败、排序)。通过控制光照,成像仪可以在有用和不相关的信息之间建立对比。
采用简单的科学方法可以很容易地找出产生必要对比的最佳方法:
●这个部件是由什么制成的,它对光有什么作用?
●光线如何到达相机?光的几何结构和路径是什么?
●什么样的照明类型和照明几何结构将为重要特征提供最佳对比度?
●什么时间进行测量以及物体如何运动?
让零件引导照明选择
第一步涉及查看零件以确定光如何与表面相互作用。它是镜面反射,亚光反射,吸收反射,屈光反射还是全部反射?诸如抛光金属之类的反射部件将以与入射到物体的光相同的角度反射光。磨砂零件将取光并将其散射到所有不同的方向。有些零件的材料会吸收光,例如纸上的墨水。玻璃或液体物体会改变光的方向(折射)。大多数对象具有这些属性中的多个。技术人员可以通过设置灯光以突出显示感兴趣的特定功能(作为自动检查或分类系统的一部分)来利用这些差异。简而言之,他们可以选择突出显示信号并最小化任何给定图像中的噪声。
第二步涉及查看零件的几何形状并想象从光源到零件以及从零件到相机的光的路径。如果没有通往相机的路径,则该图像的那部分将是暗的。如果光线反射到相机,则图像的该部分将变亮。更改光线的路径会使不同的功能变亮或变暗。照明几何中经常使用的两个术语是明场和暗场:“场”是背景或物体的平部。“明亮场”照明是指当场是明亮的。在这种情况下,光线来自于场的上方,并被反射到照相机。“暗场”是指平坦区域是黑暗的。这是因为光线被放置在场地的一侧,从而将光线从相机反射出去。
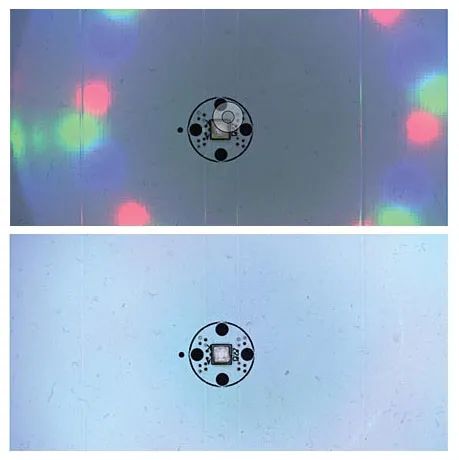
偏光滤镜有助于减少高反射表面(例如印刷电路板)的眩光。在第一个图像中,使用了多色灯光照亮PCB,以显示由直接的非偏振照明产生的各种热点。第二张照片显示同一块板具有交叉偏振光,可减少眩光并显示隐藏的代码、字符和特征。
选择最佳的照明方式
有了对光将发生什么情况以及光的路径的了解,技术人员可以决定光的类型,为零件提供光照的一般方法有六种。
一般明场照明。想象一下照相机周围的光环,直视物体。平坦和反射性的特征将比弯曲或吸收性的特征更明亮。这非常适合查看对象上的打印。
同轴照明。照相机直视物体,并且光线与照相机成一直线。串联并撞击到平坦表面的所有光线将直接向相机回射。任何平坦的东西都会很明亮。任何不平坦的物体都将变暗,因为如果光线碰到倾斜的表面,它将反射离开相机。该方法对于突出划痕或其他表面缺陷非常有效。
圆顶照明或漫射照明。将圆顶照明想象为一个大碗,中间有一个洞。碗面朝下坐着,因此相机正从孔中看,光线照进了碗中,并向各个方向散射。圆顶照明也称为“阴天照明器”。想象在一个多云但晴天的时候在外面。一切都是明亮的,但没有阴影,因为云层将光线扩散并散布到整个地方。这种方法非常适用于具有很多不同角度的物体,例如包装(泡罩包装和塑料袋)。
一般的暗场照明。相机直视物体,但光线从最低角度入射。将零件视为地平线,将灯光视为刚好位于地平线上方。光线掠过物体并远离相机。任何凹凸或凹痕都会突出显示,因为光线会击中凹凸并向相机反弹。此方法对于使用直接零件标记突出显示对象非常有效。
背光照明。该方法使用来自零件后面的平坦漫射光,并直接对准相机。该对象将阻挡光线,因此它会显得很暗,背景变成白色。这使图像具有非常清晰的边缘。此方法非常适合测量和检查液体的填充水平。
结构化的光。使用结构化照明时,一条直线或一系列直线被投影到对象上。亮线将根据对象的形状而变化。当对象具有黑色部分时,结构化光很有用。黑色会吸收所有光线,并且相机不可见。通过使用集中的光束,相机可以看到光束,因此可以检测到例如黑色塑料部件上的黑色O形圈。如果有O形圈,则线条将在图像中的某个位置;如果缺少O形圈,则亮线将位于其他位置。
合理选择照明
部署上述任何一种方法时,要注意几个事项,因为部署不当可能会引入噪声。首先,要注意环境光。尽可能多的照明会获取好的图像,不需要的光会损害图像。偏光镜可减少非金属零件的眩光。应该选择比工厂照明还要亮的光源。请注意避免阳光直射,如有必要,请覆盖该区域,以防止有害的光线进入。其次,请注意,如果您将光路的距离加倍,则光线是调光器的四倍。光源的亮度很重要,因为要捕获图像需要一定的曝光时间。曝光时间是指相机从物体上收集光的时间。曝光时间越长,相机在给定时间内可以收集的图像越少。如果物体在移动,则较长的曝光会导致图像模糊。因此,光线昏暗可能会使功能模糊,并降低吞吐量。重要的是要注意在需要较远照明的情况下,请考虑使用聚焦照明或频闪照明。
最后,我们需要讨论一下颜色。在单色相机上使用彩色灯光或滤色镜是一种高亮或隐藏图像特征的非常有效的方法。绿色物体之所以是绿色的,是因为它们反射绿色波长,吸收蓝色和红色波长。如果你最近没有这样做,请检查一个色轮。知道轮子上什么颜色是相对的是有帮助的。你可以用喜欢的颜色使物体变亮,用相反的颜色使物体变暗。例如,如果你用蓝光照射蓝色物体,它们会在单色图像中呈现白色,因为它们反射了所有的蓝光。其他颜色会吸收蓝光,颜色会变深。与此同时,CMOS成像仪对红光更加敏感,这也避免了来自蓝色和更短波长的紫外线对眼睛的潜在伤害。色彩滤镜用于排除噪音。当滤光片放在相机前时,它们可以切断不需要的波长,或者只允许需要的波长。
利用视觉进行物体检查有无限的可能,通过这些步骤,可以找到合适的照明以突出显示高品质图像所需的功能。
好消息!
小白学视觉知识星球
开始面向外开放啦👇👇👇
下载1:OpenCV-Contrib扩展模块中文版教程 在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。 下载2:Python视觉实战项目52讲 在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。 下载3:OpenCV实战项目20讲 在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。 交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~