点击上方 “小白学视觉 ”,选择加" 星标 "或“ 置顶 ”
重磅干货,第一时间送达
来源:https://zhuanlan.zhihu.com/p/343564175
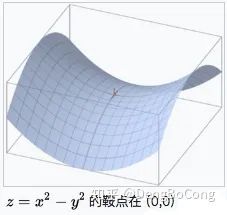
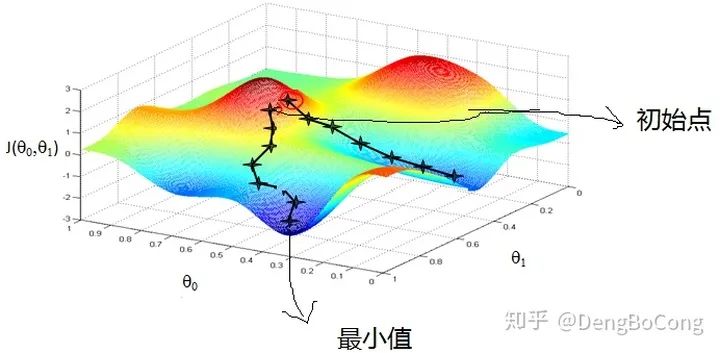
论文标题:An overview of gradient descent optimization algorithms Github:NLP相关Paper笔记和代码复现(https://github.com/DengBoCong/nlp-paper) 不管是使用PyTorch还是TensorFlow,用多了Optimizer优化器封装好的函数,对其内部使用的优化算法却没有仔细研究过,也很难对其优点和缺点进行实用的解释。所以打算以这一篇论文为主线并结合多篇优秀博文,回顾和总结目前主流的优化算法,对于没有深入了解过的算法,正好借这个机会学习一下。 当前使用的许多优化算法,是对梯度下降法的衍生和优化。在微积分中,对多元函数的参数求 这里定义一个通用的思路框架,方便我们后面理解各算法之间的关系和改进。首先定义待优化参数 其中, 鞍点:一个光滑函数的鞍点邻域的曲线,曲面,或超曲面,都位于这点的切线的不同边。例如这个二维图形,像个马鞍:在x-轴方向往上曲,在y-轴方向往下曲,鞍点就是(0,0)。 什么是指数加权平均、偏差修正?- 郭耀华 - 博客园 https://www.cnblogs.com/guoyaohua/p/8544835.html 在GD中没有动量的概念,也就是说在上述框架中: ; 梯度下降算法中,模型参数的更新调整,与代价函数关于模型参数的梯度有关,即沿着梯度的方向不断减小模型参数,从而最小化代价函数。基本策略可以理解为”在有限视距内寻找最快路径下山“,因此每走一步,参考当前位置最陡的方向(即梯度)进而迈出下一步,更形象的如下图: 训练速度慢:在应用于大型数据集中,每输入一个样本都要更新一次参数,且每次迭代都要遍历所有的样本,会使得训练过程及其缓慢,需要花费很长时间才能得到收敛解。 容易陷入局部最优解:由于是在有限视距内寻找下山的反向,当陷入平坦的洼地,会误以为到达了山地的最低点,从而不会继续往下走。所谓的局部最优解就是鞍点,落入鞍点,梯度为0,使得模型参数不在继续更新。
Batch Gradient Descent(BGD)
BGD相对于标准GD进行了改进,改进的地方通过它的名字应该也能看出来,也就是不再是想标准GD一样,对每个样本输入都进行参数更新,而是针对一个批量的数据输入进行参数更新。我们假设批量训练样本总数 为 从上面的公式我们可以看到,BGD其实是在一个批量的样本数据中,求取该批量样本梯度的均值来更新参数,即每次权值调整发生在批量样本输入之后,而不是每输入一个样本就更新一次模型参数,这样就会大大加快训练速度,但是还是不够,我们接着往下看。
Stochastic Gradient Descent(SGD)
随机梯度下降法,不像BGD每一次参数更新,需要计算整个数据样本集的梯度,而是每次参数更新时,仅仅选取一个样本 公式看起来和上面标准GD一样,但是注意了,这里的样本是从批量中随机选取一个,而标准GD是所有的输入样本都进行计算。可以看到BGD和SGD是两个极端,SGD由于每次参数更新仅仅需要计算一个样本的梯度,训练速度很快,即使在样本量很大的情况下,可能只需要其中一部分样本就能迭代到最优解,由于每次迭代并不是都向着整体最优化方向,导致梯度下降的波动非常大(如下图),更容易从一个局部最优跳到另一个局部最优,准确度下降。 论文中提到,当缓慢降低学习率时,SGD会显示与BGD相同的收敛行为,几乎一定会收敛到局部(非凸优化)或全局最小值(凸优化)。 虽然看起来SGD波动非常大,会走很多弯路,但是对梯度的要求很低(计算梯度快),而且对于引入噪声,大量的理论和实践工作证明,只要噪声不是特别大,SGD都能很好地收敛。 应用大型数据集时,训练速度很快。比如每次从百万数据样本中,取几百个数据点,算一个SGD梯度,更新一下模型参数。相比于标准梯度下降法的遍历全部样本,每输入一个样本更新一次参数,要快得多。 SGD在随机选择梯度的同时会引入噪声,使得权值更新的方向不一定正确(次要)。
Mini-batch Gradient Descent(MBGD,也叫作SGD)
小批量梯度下降法就是结合BGD和SGD的折中,对于含有
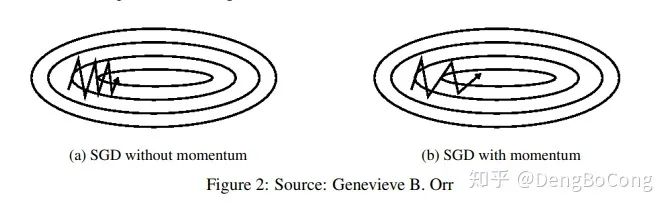
小批量梯度下降法即保证了训练的速度,又能保证最后收敛的准确率,目前的SGD默认是小批量梯度下降算法。常用的小批量尺寸范围在50到256之间,但可能因不同的应用而异。 Mini-batch gradient descent 不能保证很好的收敛性,learning rate 如果选择的太小,收敛速度会很慢,如果太大,loss function 就会在极小值处不停地震荡甚至偏离(有一种措施是先设定大一点的学习率,当两次迭代之间的变化低于某个阈值后,就减小 learning rate,不过这个阈值的设定需要提前写好,这样的话就不能够适应数据集的特点)。对于非凸函数,还要避免陷于局部极小值处,或者鞍点处,因为鞍点所有维度的梯度都接近于0,SGD 很容易被困在这里(会在鞍点或者局部最小点震荡跳动,因为在此点处,如果是BGD的训练集全集带入,则优化会停止不动,如果是mini-batch或者SGD,每次找到的梯度都是不同的,就会发生震荡,来回跳动)。 SGD对所有参数更新时应用同样的 learning rate,如果我们的数据是稀疏的,我们更希望对出现频率低的特征进行大一点的更新, 且learning rate会随着更新的次数逐渐变小。 momentum算法思想:参数更新时在一定程度上保留之前更新的方向,同时又利用当前batch的梯度微调最终的更新方向,简言之就是通过积累之前的动量来加速当前的梯度。从这里开始,我们引入一阶动量的概念(在mini-batch SGD的基础之上),也就是说,在最开始说的框架中, 一阶动量是各个时刻梯度方向的指数移动平均值,约等于最近 Hessian矩阵病态问题(可以理解为SGD在收敛过程中和正确梯度相比来回摆动比较大的问题)。
Nesterov Accelerated Gradient
NAG(Nesterov accelerated gradient)算法,是Momentum动量算法的变种。momentum保留了上一时刻的梯度 加上nesterov项后,梯度在大的跳跃后,进行计算对当前梯度进行校正。下图是momentum和nesterrov的对比表述图如下: Nesterov动量梯度的计算在模型参数施加当前速度之后,因此可以理解为往标准动量中添加了一个校正因子。在凸批量梯度的情况下,Nesterov动量将额外误差收敛率从 Momentum和Nexterov都是为了使梯度更新更灵活。但是人工设计的学习率总是有些生硬,下面介绍几种自适应学习率的方法。 Adagrad其实是对学习率进行了一个约束,对于经常更新的参数,我们已经积累了大量关于它的知识,不希望被单个样本影响太大,希望学习速率慢一些;对于偶尔更新的参数,我们了解的信息太少,希望能从每个偶然出现的样本身上多学一些,即学习速率大一些。而该方法中开始使用二阶动量,才意味着“自适应学习率”优化算法时代的到来。 我们前面都没有好好的讨论二阶动量,二阶动量是个啥?它是用来度量历史更新频率的,二阶动量是迄今为止所有梯度值的平方和,即 细心的小伙伴应该会发现Adagrad还是存在一个很明显的缺点: 仍需要手工设置一个全局学习率 中后期,分母上梯度累加的平方和会越来越大,使得参数更新量趋近于0,使得训练提前结束,无法学习 由于AdaGrad调整学习率变化过于激进,我们考虑一个改变二阶动量计算方法的策略:不累积全部历史梯度,而只关注过去一段时间窗口的下降梯度,即Adadelta只累加固定大小的项,并且也不直接存储这些项,仅仅是近似计算对应的平均值(指数移动平均值),这就避免了二阶动量持续累积、导致训练过程提前结束的问题了,参数更新公式如下: 观察上面的参数更新公式,我们发现还是依赖于全局学习率 此时可以看出Adadelta已经不依赖全局learning rate了 ,Adadelta有如下特点:RMSProp算法修改了AdaGrad的梯度平方和累加为指数加权的移动平均,使得其在非凸设定下效果更好。设定参数:全局初始率 RMSprop算是Adagrad的一种发展,和Adadelta的变体,效果趋于二者之间 适合处理非平稳目标(包括季节性和周期性)——对于RNN效果很好
Adaptive Moment Estimation(Adam)
其实有了前面的方法,Adam和Nadam的出现就很理所当然的了,因为它们结合了前面方法的一阶动量和二阶动量。我们看到,SGD-M和NAG在SGD基础上增加了一阶动量,AdaGrad和AdaDelta在SGD基础上增加了二阶动量,参数更新公式如下(按照最开始总结的计算框架): 通常情况下,默认值为 Adam梯度经过偏置校正后,每一次迭代学习率都有一个固定范围,使得参数比较平稳。 结合了Adagrad善于处理稀疏梯度和RMSprop善于处理非平稳目标的优点 也适用于大多非凸优化问题——适用于大数据集和高维空间。 Adamax是Adam的一种变体,此方法对学习率的上限提供了一个更简单的范围,即使用无穷范式,参数更新公式如下: 其实如果说要集成所有方法的优点于一身的话,Nadam应该就是了,Adam遗漏了啥?没错,就是Nesterov项,我们在Adam的基础上,加上Nesterov项就是Nadam了,参数更新公式如下: 可以看出,Nadam对学习率有更强的约束,同时对梯度的更新也有更直接的影响。一般而言,在使用带动量的RMSprop或Adam的问题上,使用Nadam可以取得更好的结果。
下图在一个存在鞍点的曲面,比较6中优化器的性能表现:
下图图比较了6种优化器收敛到目标点(五角星)的运行过程
那种优化器最好?该选择哪种优化算法?目前还没能够达达成共识。Schaul et al (2014)展示了许多优化算法在大量学习任务上极具价值的比较。虽然结果表明,具有自适应学习率的优化器表现的很鲁棒,不分伯仲,但是没有哪种算法能够脱颖而出。 目前,最流行并且使用很高的优化器(算法)包括SGD、具有动量的SGD、RMSprop、具有动量的RMSProp、AdaDelta和Adam。在实际应用中,选择哪种优化器应结合具体问题;同时,也优化器的选择也取决于使用者对优化器的熟悉程度(比如参数的调节等等)。 对于稀疏数据,尽量使用学习率可自适应的优化方法,不用手动调节,而且最好采用默认值 SGD通常训练时间更长,但是在好的初始化和学习率调度方案的情况下,结果更可靠 如果在意更快的收敛,并且需要训练较深较复杂的网络时,推荐使用学习率自适应的优化方法。 Adadelta,RMSprop,Adam是比较相近的算法,在相似的情况下表现差不多。 在想使用带动量的RMSprop,或者Adam的地方,大多可以使用Nadam取得更好的效果 添加梯度噪声(高斯分布 下载1:OpenCV-Contrib扩展模块中文版教程 在「小白学视觉 扩展模块中文教程 , 即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理 等二十多章内容。在「小白学视觉 公众号后台回复:Python视觉实战项目 , 即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别 等31个视觉实战项目,助力快速学校计算机视觉。 在「小白学视觉 公众号后台回复:OpenCV实战项目20讲 , 即可下载含有20 个基于OpenCV 实现20个实战项目 ,实现OpenCV学习进阶。 交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉 、传感器、自动驾驶、 计算摄影 、检测、分割、识别、医学影像、GAN、算法竞赛 等微信群(以后会逐渐细分), 请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过 。添加成功后会根据研究方向邀请进入相关微信群。请勿 在群内发送广告 ,否则会请出群,谢谢理解~