
目标检测算法YOLO-V3结构详解
❝上期我们一起学了
❞YOLO-V2的算法结构以及跟YOLO-V1比起来有哪些优缺点,如下:
目标检测算法YOLO-V2详解
今天我们看下在YOLO-V2版本上改进的YOLO-V3算法,到底做了哪些优化?
今天我们主要从以下几个方面来学习YOLO-V3对YOLO-V2做了哪些改进。
Darknet-53结构YOLO-V3结构先验框设置 损失函数 模型性能
YOLO-V3模型框架
YOLO-V3模型框架,我们主要从它的基础网络Darknet-53以及YOLO-V3的结构方面学习,首先看下Darknet-53结构。
Darknet-53结构
Darknet-53是专门为YOLO-V3设计的一个深度学习框架,有着非常好的图像识别的效果,如下图:

整个网络主要包括5组残差块,如下:
以 256x256输入为例,首先经过一个3x3x32的卷积层输出为256x256x32;接着经过一个 3x3x64 stride=2的卷积层输出为128x128x64;接着经过一个残差块(前面学习残差网络的时候学过),输出为 128x128x64;再经过一个 3x3x128 stride=2的卷积层输出为64x64x128;经过 2个残差块后输出为64x64x128;接着经过一个 3x3x256 stride=2的卷积层输出为32x32x256;接着经过 8个残差块,输出为32x32x256;再经过一个 3x3x512 stride=2的卷积层输出为16x16x512;接着经过 8个残差块后输出为16x16x512;接着经过一个 3x3x1024 stride=2的卷积层输出为8x8x1024;接着经过 4个残差块后输出为8x8x1024;最后经过池化全连接层以及 softmax输出.
这就是Darknet-53网络的具体框架,接下来我们看下YOLO-V3算法是怎么嫁接上去的。
YOLO-V3结构
YOLO-V3借鉴了前面学的SSD算法的思想,采用从不同尺度特征图上下手的检测方式,如下:
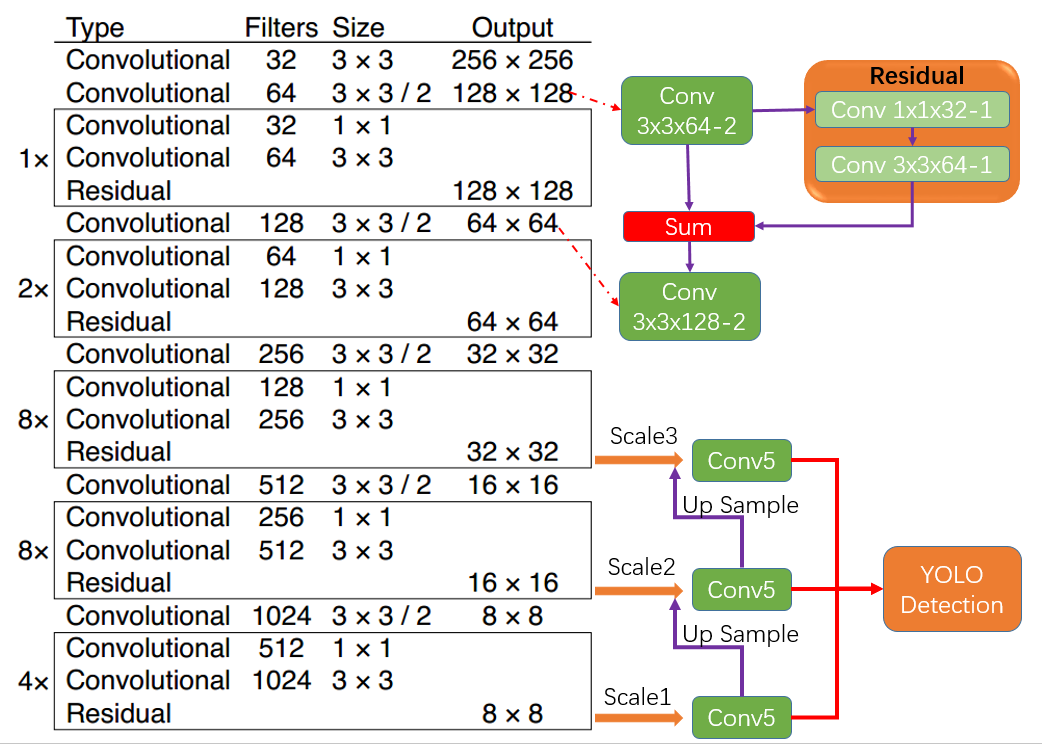
我们看下这个残差块,如上图右上小块,简单的说就是一组特征图与它经过两个卷积层后的特征图相加。
YOLO-V3分别从Darknet-53框架的第7步,第9步和第11步的特征图下手进行多尺度检测。首先,一起从Darknet-53最后输出的8x8x1024的特征图看如何检测的。这里将8x8x1024的特征图经过5个卷积层进行二次提取特征后拿去检测目标。而后再将提取后的特征图上采样与第9步的特征图合并经过5个卷积层进行二次提取特征后拿去检测目标。再将第9步的二次提取特征图上采样与第7步的特征图合并进行二次特征提取检测目标。
YOLO-V3一般使用416x416大小的图片作为输入,根据上面结构图,最后得到的特征图为13x13,Scale2的特征图为26x26,Scale3的特征图为52x52.YOLO-V3使用的是COCO数据集训练,COCO数据集目标检测有80个类别,而YOLO-V3中每个cell有3个box,每个box还有(x,y,w,h,confidence)五个基本参数,也就是说一个cell对应的输出维度为3x(5+80)=255(这里不明白为什么这样计算的请参考YOLO-V2算法).
所以YOLO-V3有3个不同特征尺度的输出,分别为13x13x255,26x26x255和52x52x255的检测结果。对于416x416的输入图片,YOLO-V2中的bounding boxes有13x13x5=845个,而YOLO-V3则有(13x13+26x26+52x52)x3=10467个.
模型的训练及性能
明白了YOLO-V3算法的结构,我们一起看下训练方面的东西,首先先验框该怎么设?
先验框设置
前面学的YOLO-V2算法已经开始采用K-means聚类得到先验框的尺寸,YOLO-V3延续了这种方法,为每种下采样尺度设定3中先验框,总共聚类出9中尺寸的先验框。在COCO数据集上,这9个先验框是(10x13),(16x30),(33x23),(30x61),(62x45),(59x119),(116x90),(156x198),(373x326).
分配上,在最小的13x13特征图上(有最大的感受野)应用较大的先验框(116x90),(156x198),(373x326)适合检测较大的对象。
中等的26x26特征图上(中等感受野)应用中等大小的先验框(30x61),(62x45),(59x119),适合检测中等大小的对象。
较大的52x52特征图上(较小的感受野)应用较小的先验框(10x13),(16x30),(33x23),适合检测较小的对象。如下表: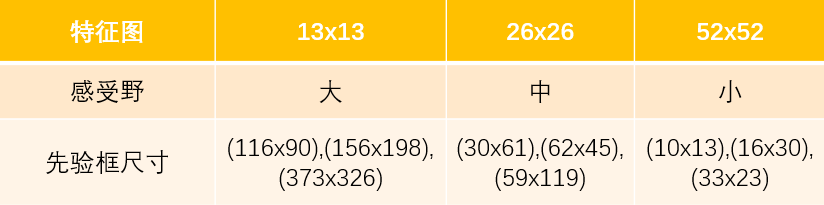
损失函数
YOLO-V3对类别预测的代价函数进行了修改,并且没有用softmax。那为什么没有用softmax呢?在原来的分类网络中softmax层都是假设一张图片或者一个object只属于一个类别,但是在一些复杂场景下,一个object可能属于多个类,比如,我们的类别中有woman和person这两类,那么如果一张图像中有一个woman,那么我们检测的结果中类别标签就要同时有woman和person这两类,这就是多标签分类。也就是一个object属于多个类别。
所以在YOLO-V3中,用了逻辑回归层来对每个类别做二分类。逻辑回归层主要用到sigmoid函数,该函数可以将输入约束在0~1的范围内,因此当一张图像经过特征提取后的某一类输出经过sigmoid函数约束后如果大于0.5,就表示属于该类,这样一个框就可以预测多个类别,代价函数用的是sigmoid的交叉熵。
模型性能
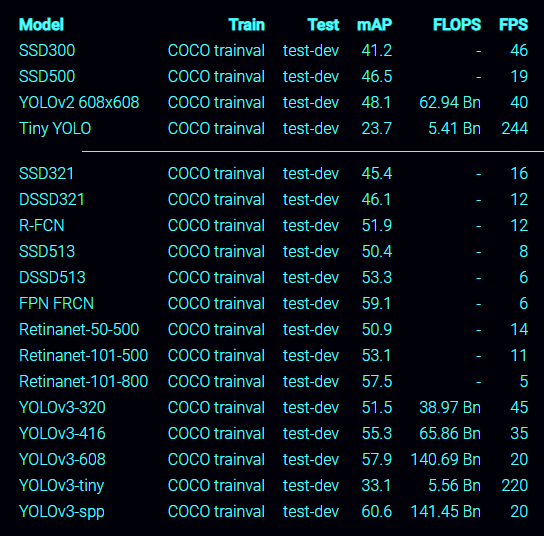
YOLO-V3在速度和准确率上都是很不错的,从下图中,我们可以看到在跟其他算法进行对比的图中,YOLO-V3在inference time上处于领先地位,其中YOLOV3-320由于输入图片为320x320,所以inference time最小为22ms,而YOLOV3-608由于输入图片较大,inference time为51ms,也是领先于其他算法的。虽然mAP最高的算法为FPN-FRCN,但是运行时间却要172ms。而YOLOV3-608的mAP也达到了57.9。

从下面各算法在COCO数据集上的性能图中,我们也可以清楚的看到YOLO-V3算法的强大性能。
好了,至此,我们今天从Darknet-53结构,YOLO-V3结构,先验框设置,损失函数,模型性能的角度对YOLO-V3做了详细的介绍,以及跟YOLO-V2对比做了哪些改进,希望对大家有些帮助。下期,我们将一起学习目标检测算法YOLO-V4。