链接 | https://zhuanlan.zhihu.com/p/143747206
因为工作原因,项目中经常遇到目标检测的任务,因此对目标检测算法会经常使用和关注,比如Yolov3、Yolov4算法。
当然,实际项目中很多的第一步,也都是先进行目标检测任务 ,比如人脸识别、多目标追踪、REID、客流统计 等项目。因此目标检测 是计算机视觉项目中非常重要的一部分。
从2018年Yolov3年提出的两年后,在原作者声名放弃更新Yolo算法后,俄罗斯的Alexey大神扛起了Yolov4的大旗。
在此,大白将项目中,需要了解的Yolov3、Yolov4系列相关知识点以及相关代码进行完整的汇总,希望和大家共同学习探讨。
版权申明:转载及引用本文相关图片,需经作者江大白 授权。 本文包含图片,都为作者江大白 所绘制,如需高清图片,可邮箱发送信息,需要哪部分的图片。 江大白邮箱:jiangdabai@126.com
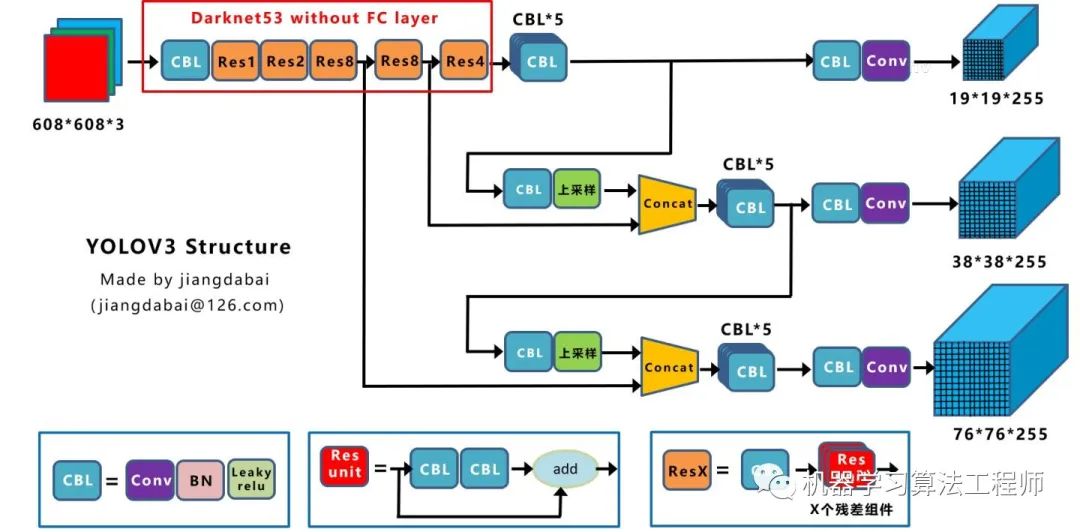
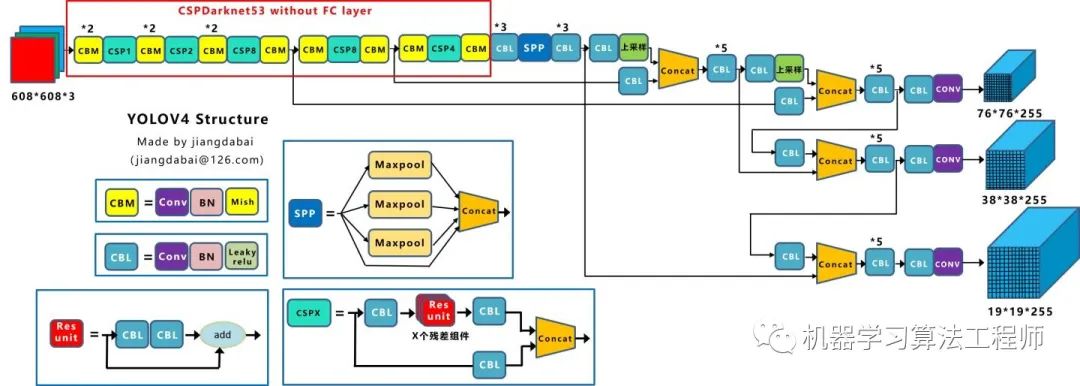
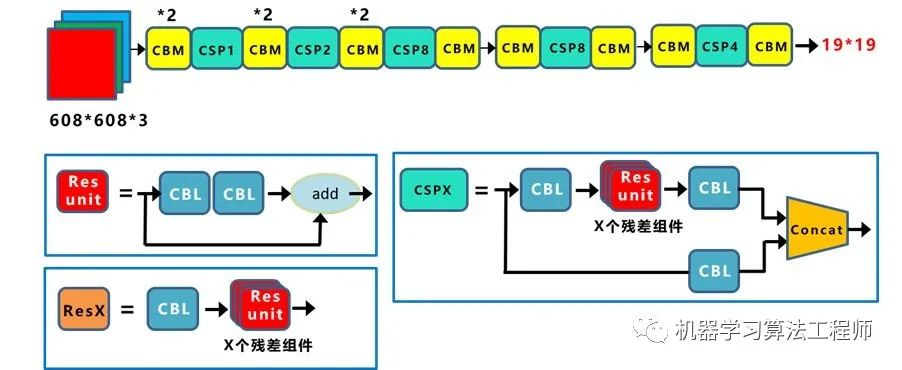
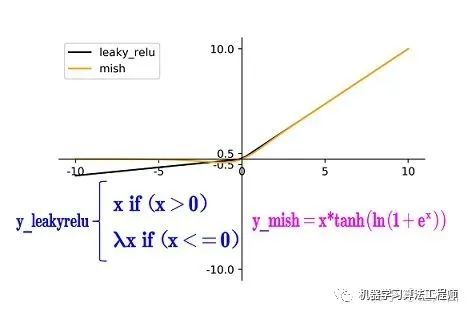
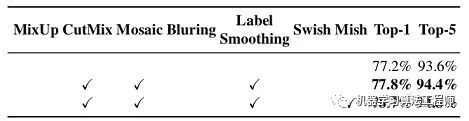
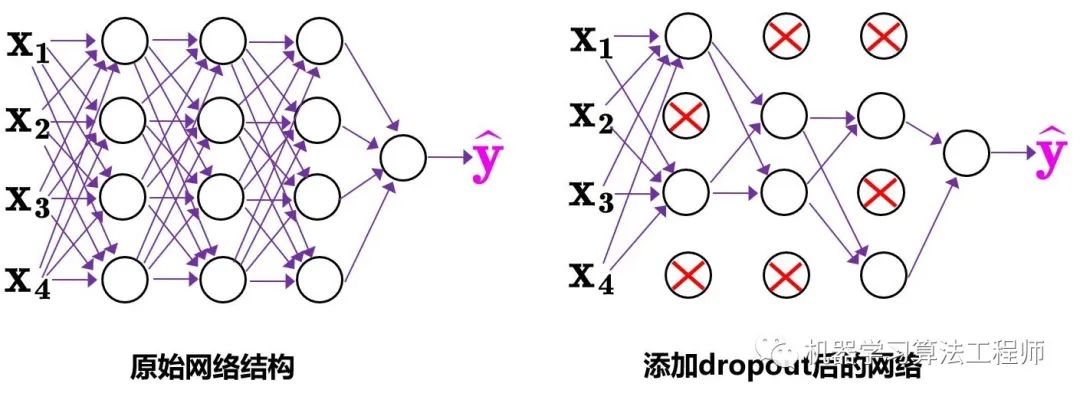
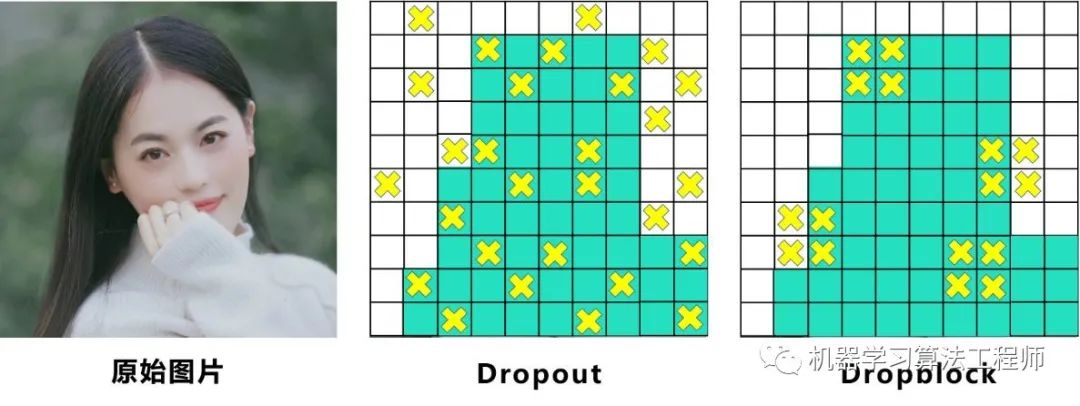
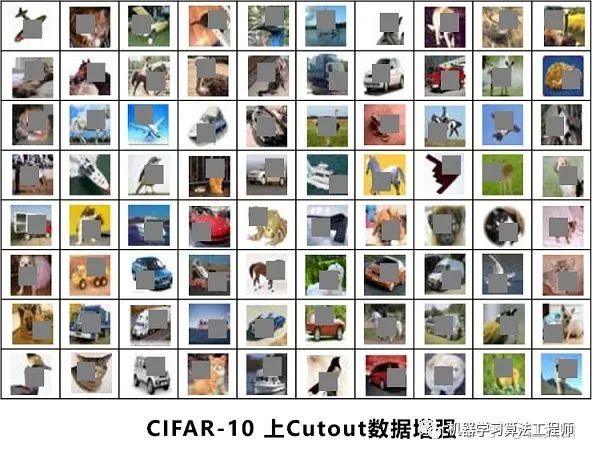
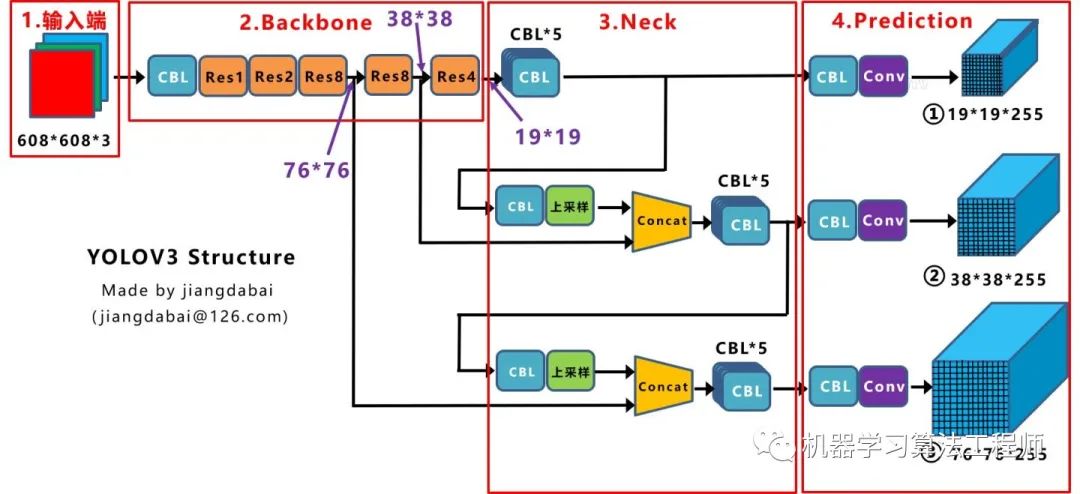
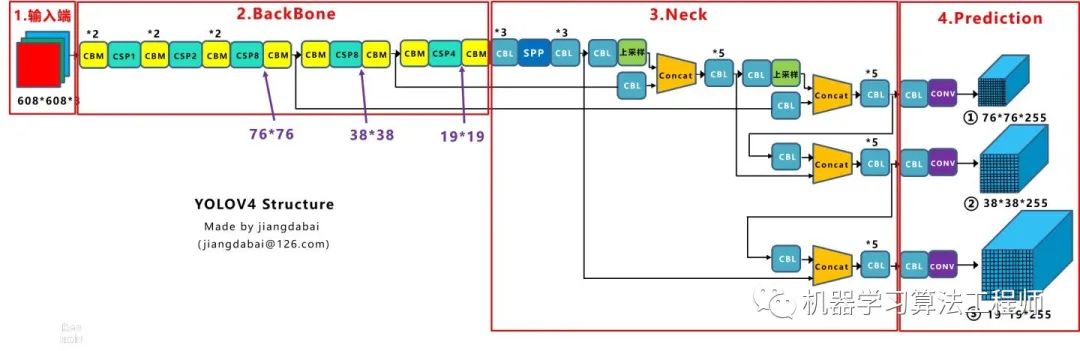
1.论文汇总Yolov3论文名:《Yolov3: An Incremental Improvement》 Yolov3论文地址:arxiv.org/pdf/1804.0276 Yolov4论文名:《Yolov4: Optimal Speed and Accuracy of Object Detection》 Yolov4论文地址:arxiv.org/pdf/2004.1093 2.YoloV3核心基础内容2.1 网络结构可视化 Yolov3 是目标检测Yolo系列 非常非常经典的算法,不过很多同学拿到Yolov3 或者Yolov4 的cfg文件 时,并不知道如何直观的可视化查看网络结构。如果纯粹看cfg里面的内容,肯定会一脸懵逼 。其实可以很方便的用netron 查看Yolov3的网络结构图 ,一目了然。 这里不多说,如果需要安装,可以移步大白的另一篇文章:《网络可视化工具netron详细安装流程》。 如果不想安装,也可以直接点击此链接,查看Yolov3可视化流程图。 2.2 网络结构图 绘制网络结构图受到Yolov3另一位作者文章的启发,包括下面Yolov4 的结构图,确实,从总体框架上先了解了Yolov3 的流程,再针对去学习每一小块的知识点,会事半功倍。 上图三个蓝色方框内表示Yolov3的三个基本组件 :CBL: Yolov3网络结构中的最小组件,由Conv+Bn+Leaky_relu 激活函数三者组成。Res unit: 借鉴Resnet 网络中的残差结构,让网络可以构建的更深。ResX: 由一个CBL 和X 个残差组件构成,是Yolov3中的大组件。每个Res模块前面的CBL都起到下采样的作用,因此经过5次Res模块后,得到的特征图是608->304->152->76->38->19大小 。Concat: 张量拼接,会扩充两个张量的维度,例如26*26*256和26*26*512两个张量拼接,结果是26*26*768。Concat和cfg文件中的route功能一样。add: 张量相加,张量直接相加,不会扩充维度,例如104*104*128和104*104*128相加,结果还是104*104*128。add和cfg文件中的shortcut功能一样。每个ResX中包含1+2*X个卷积层,因此整个主干网络Backbone中一共包含1+(1+2*1)+(1+2*2)+(1+2*8)+(1+2*8)+(1+2*4)=52 ,再加上一个FC全连接层,即可以组成一个Darknet53分类网络 。不过在目标检测Yolov3中,去掉FC层,不过为了方便称呼,仍然把Yolov3 的主干网络叫做Darknet53结构 。 2.3 核心基础内容 Yolov3 是2018年 发明提出的,这成为了目标检测one-stage 中非常经典的算法,包含Darknet-53网络结构、anchor锚框、FPN 等非常优秀的结构。本文主要目的在于描述Yolov4 和Yolov3 算法的不同及创新之处,对Yolov3的基础不过多描述。 不过大白也正在准备Yolov3算法非常浅显易懂的基础视频课程,让小白也能简单清楚的了解Yolov3的整个过程及各个算法细节,制作好后会更新到此处,便于大家查看。 在准备课程过程中,大白搜集查看了网络上几乎所有的Yolov3资料,在此整理几个非常不错的文章及视频,大家也可以点击查看,学习相关知识。 https://www.bilibili.com/video/BV1N4411J7Y6?from=search&seid=18074481568368507115 (2)文章:Yolo系列之Yolov3【深度解析】 https://blog.csdn.net/leviopku/article/details/82660381 https://blog.csdn.net/litt1e/article/details/88907542 相信大家看完,对于Yolov3的基础知识点 会有一定的了解。 3.YoloV3相关代码3.1 python代码 代码地址:https://github.com/ultralytics/Yolov3 3.2 C++代码 这里推荐Yolov4作者的darknetAB代码,代码和原始作者代码相比,进行了很多的优化,如需要运行Yolov3网络,加载cfg时,使用Yolov3.cfg即可 代码地址: https://github.com/AlexeyAB/darknet 3.3 python版本的Tensorrt代码 除了算法研究外,实际项目中还需要将算法落地部署到工程上使用,比如GPU服务器使用时还需要对模型进行tensorrt加速。 (1)Tensort中的加速案例 强烈推荐tensort软件中,自带的Yolov3加速案例,路径位于tensorrt解压文件夹的TensortX/samples/python/Yolov3_onnx中 针对案例中的代码,如果有不明白的,也可参照下方文章上的详细说明: 代码地址: https://www.cnblogs.com/shouhuxianjian/p/10550262.html (2)Github上的tensorrt加速 除了tensorrt软件中的代码, github上也有其他作者的开源代码 代码地址: https://github.com/lewes6369/TensorRT-Yolov3 3.4 C++版本的Tensorrt代码 项目的工程部署上,如果使用C++版本进行Tensorrt加速,一方面可以参照Alexey的github代码,另一方面也可以参照下面其他作者的开源代码 代码地址: https://github.com/wang-xinyu/tensorrtx/tree/master/Yolov3 4.YoloV4核心基础内容4.1 网络结构可视化 Yolov4的网络结构也可以使用netron工具查看,大白也是对照其展示的可视化流程图绘制的下方网络结构图。 netron可视化 显示Yolov4 网络结构可以参照大白的另一篇文章:《netron可视化网络结构详细安装流程》 如果不想安装,也可以直接点击此链接,查看Yolov4可视化流程图。 4.2 网络结构图 Yolov4的结构图和Yolov3相比,因为多了CSP结构,PAN结构 ,如果单纯看可视化流程图,会觉得很绕,不过在绘制出上面的图形后,会觉得豁然开朗,其实整体架构和Yolov3是相同的,不过使用各种新的算法思想对各个子结构都进行了改进。 CBM: Yolov4网络结构中的最小组件,由Conv+Bn+Mish激活函数三者组成。CBL: 由Conv+Bn+Leaky_relu激活函数三者组成。Res unit: 借鉴Resnet网络中的残差结构,让网络可以构建的更深。CSPX: 借鉴CSPNet网络结构,由三个卷积层和X个Res unint模块Concate组成。SPP: 采用1×1,5×5,9×9,13×13的最大池化的方式,进行多尺度融合。Concat: 张量拼接,维度会扩充,和Yolov3中的解释一样,对应于cfg文件中的route操作。add: 张量相加,不会扩充维度,对应于cfg文件中的shortcut操作。和Yolov3一样,再来数一下Backbone里面的卷积层数量。 每个CSPX中包含3+2*X个卷积层,因此整个主干网络Backbone中一共包含2+(3+2*1)+2+(3+2*2)+2+(3+2*8)+2+(3+2*8)+2+(3+2*4)+1=72。 这里大白有些疑惑,按照Yolov3设计的传统,这么多卷积层,主干网络不应该叫CSPDaeknet73吗???? 4.3 核心基础内容 Yolov4 本质上和Yolov3 相差不大,可能有些人会觉得失望。第一种:面目一新的创新 ,比如Yolov1、Faster-RCNN、Centernet等,开创出新的算法领域,不过这种也是最难的
第二种:守正出奇的创新, 比如将图像金字塔改进为特征金字塔
第三种:各种先进算法集成的创新, 比如不同领域发表的最新论文的tricks,集成到自己的算法中,却发现有出乎意料的改进
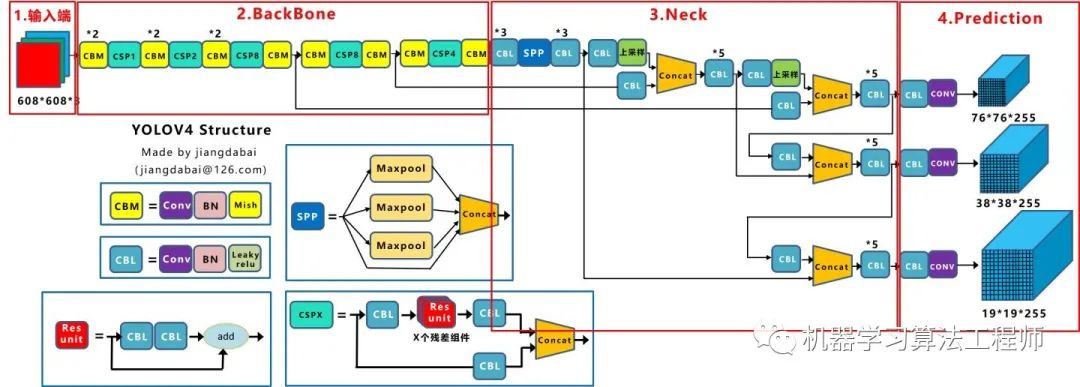
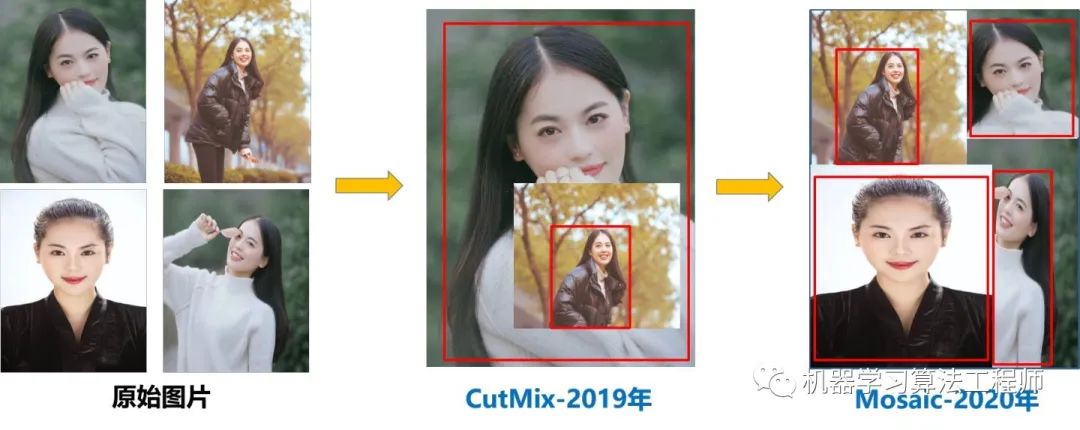
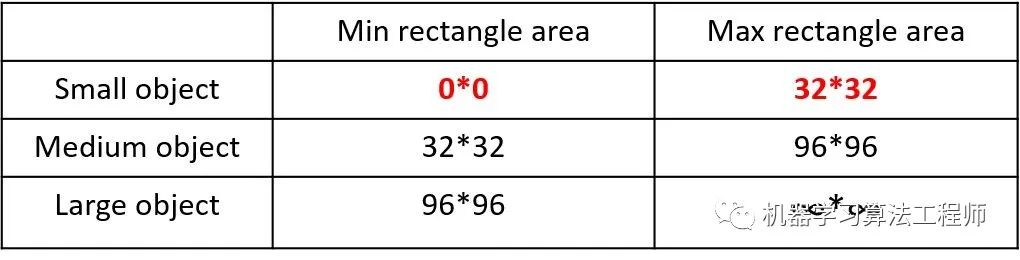
Yolov4 既有第二种也有第三种创新,组合尝试了大量深度学习领域最新论文的20多项研究成果,而且不得不佩服的是作者Alexey 在github 代码库维护的频繁程度。目前Yolov4代码的star数量已经1万多 ,据我所了解,目前超过这个数量的,目标检测领域只有Facebook的Detectron(v1-v2) 、和Yolo(v1-v3)官方代码库(已停止更新)。 所以Yolov4 中的各种创新方式,大白觉得还是很值得仔细研究的。 为了便于分析,将Yolov4的整体结构拆分成四大板块: 大白主要从以上4个部分对YoloV4的创新之处进行讲解,让大家一目了然。 输入端: 这里指的创新主要是训练时对输入端的改进,主要包括Mosaic数据增强、cmBN、SAT自对抗训练
BackBone主干网络: 将各种新的方式结合起来,包括:CSPDarknet53、Mish激活函数、Dropblock
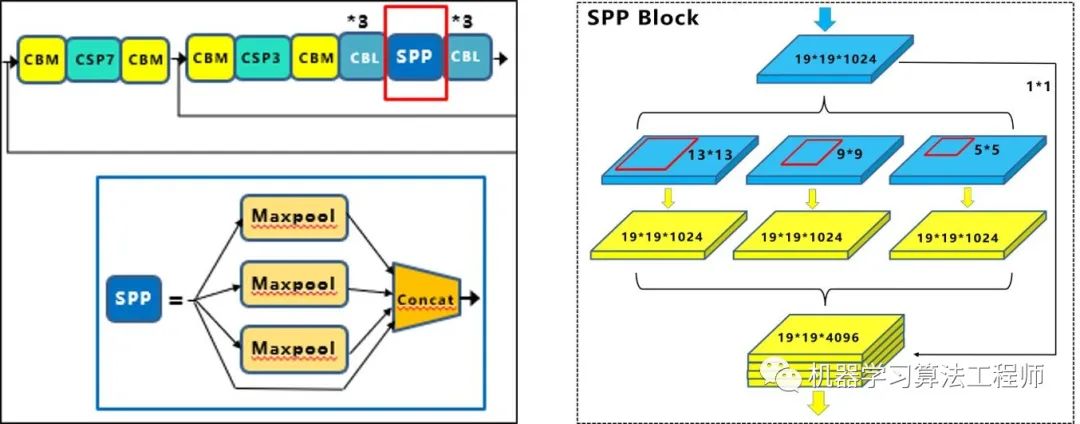
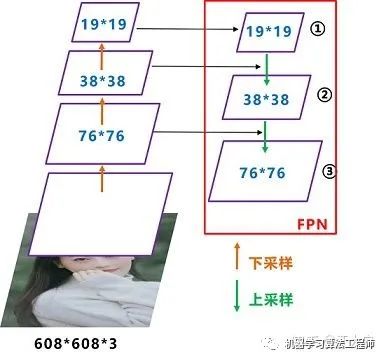
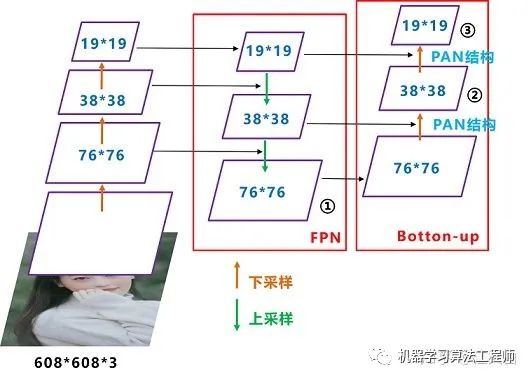
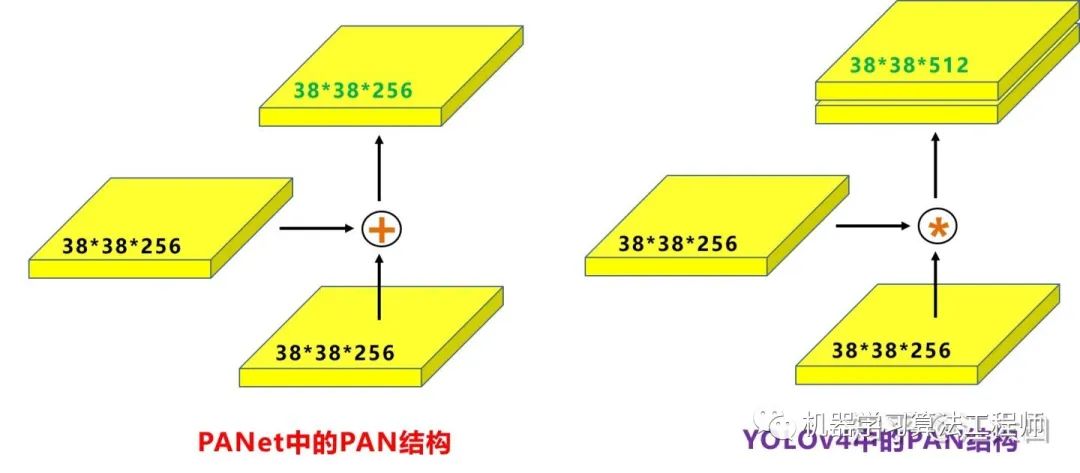
Neck: 目标检测网络在BackBone和最后的输出层之间往往会插入一些层,比如Yolov4中的SPP模块 、FPN+PAN结构
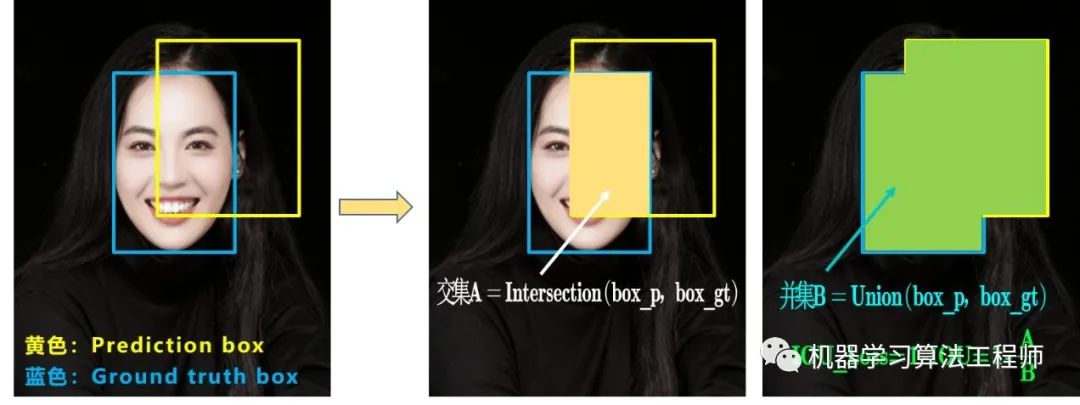
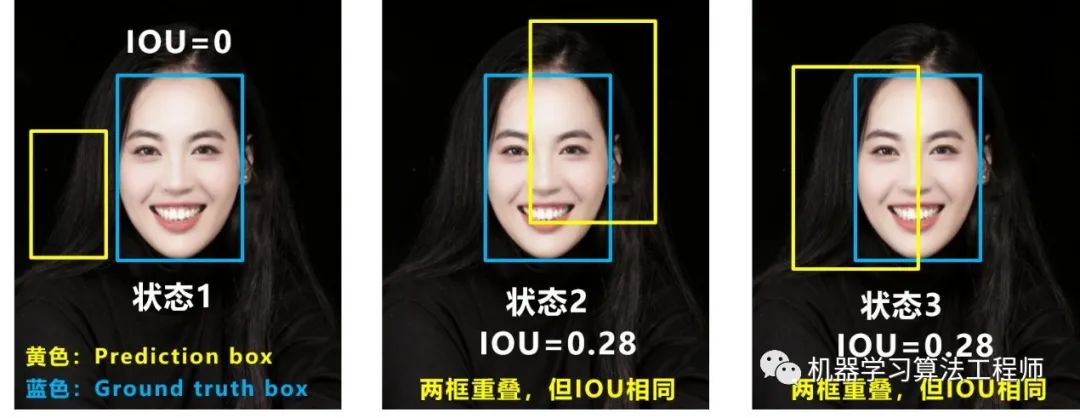
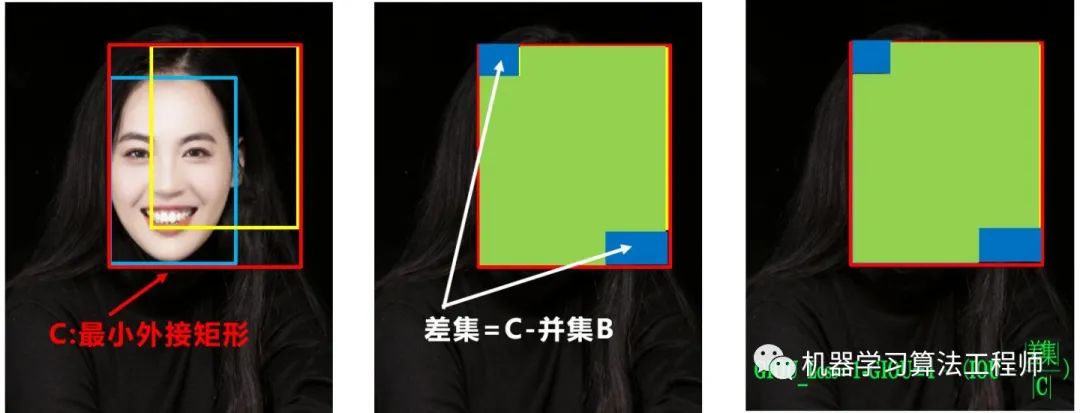
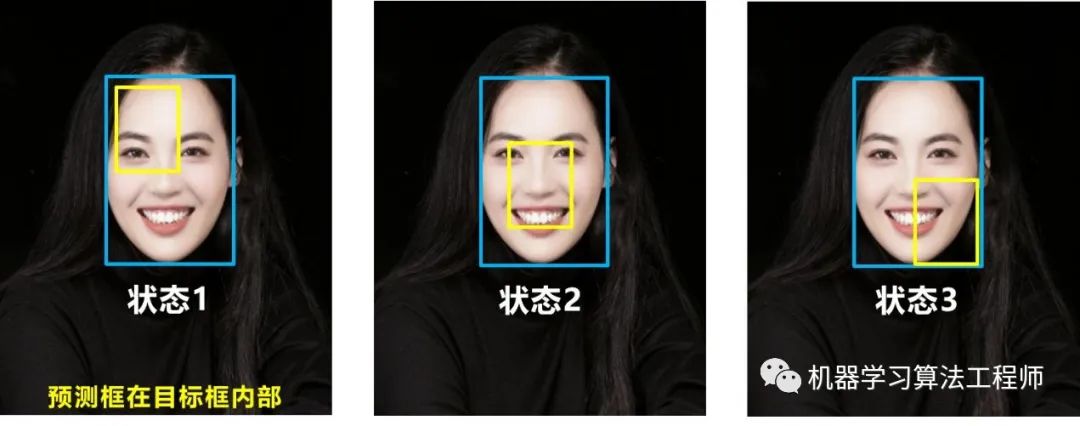
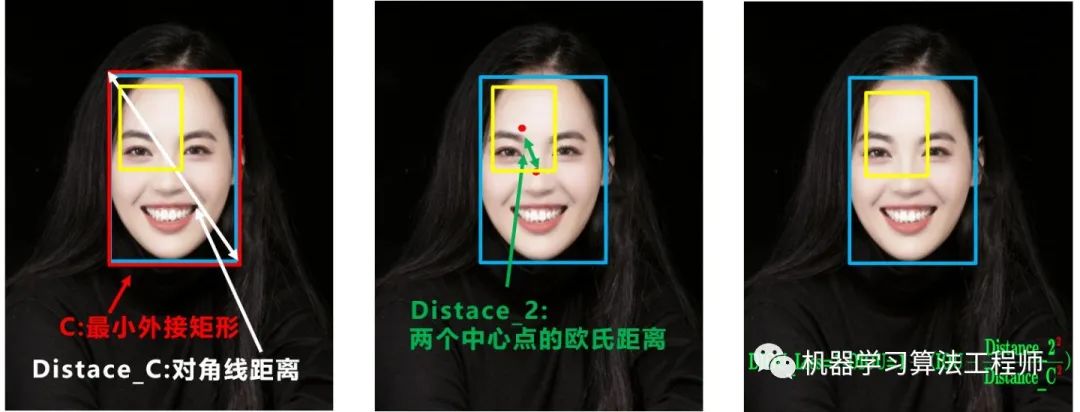
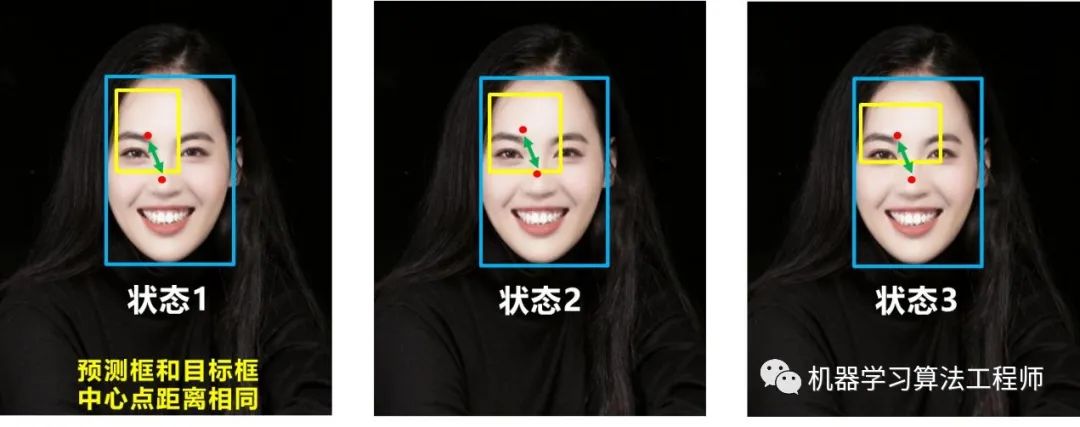
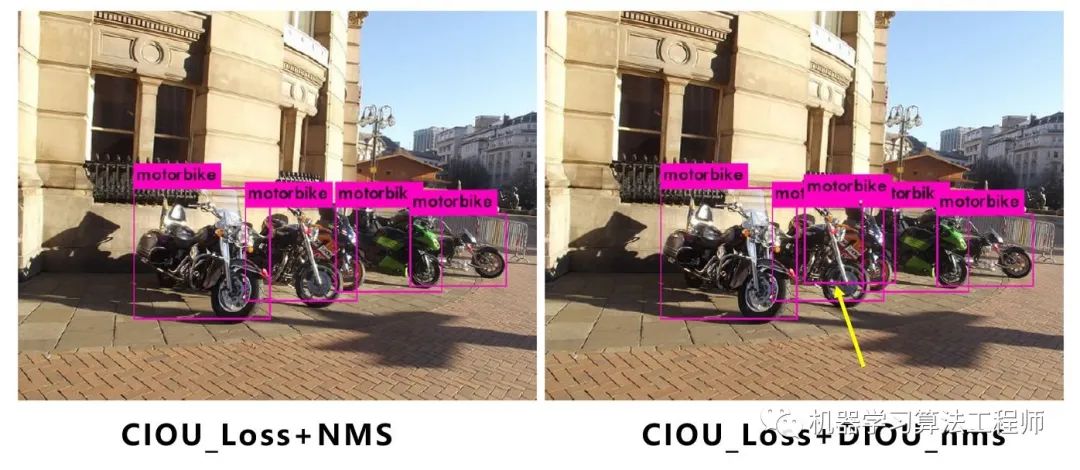
Prediction: 输出层的锚框机制和Yolov3相同,主要改进的是训练时的损失函数CIOU_Loss ,以及预测框筛选的nms变为DIOU_nms
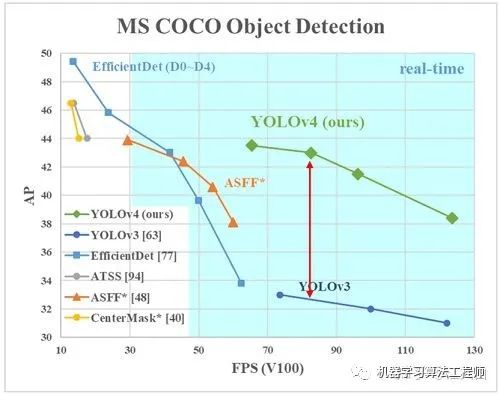
总体来说,Yolov4 对Yolov3 的各个部分都进行了改进优化,下面丢上作者的算法对比图。 仅对比Yolov3和Yolov4 ,在COCO数据集上,同样的FPS等于83左右时,Yolov4的AP是43,而Yolov3是33,直接上涨了10个百分点 。 不得不服,当然可能针对具体不同的数据集效果也不一样,但总体来说,改进效果是很优秀的,下面大白对Yolov4的各个创新点 继续进行深挖。 4.3.1 输入端创新 考虑到很多同学GPU显卡数量并不是很多,Yolov4 对训练时的输入端进行改进,使得训练在单张GPU上也能有不错的成绩。比如数据增强Mosaic、cmBN、SAT自对抗训练。 但感觉cmBN和SAT影响并不是很大,所以这里主要讲解Mosaic数据增强。 (1)Mosaic数据增强 Yolov4 中使用的Mosaic 是参考2019年底提出的CutMix数据增强 的方式,但CutMix 只使用了两张图片进行拼接,而Mosaic数据增强 则采用了4张图片,随机缩放、随机裁剪、随机排布 的方式进行拼接。这里首先要了解为什么要进行Mosaic数据增强 呢? 在平时项目训练时,小目标的AP 一般比中目标和大目标低很多。而Coco数据集中也包含大量的小目标,但比较麻烦的是小目标的分布并不均匀 。 首先看下小、中、大目标的定义: 可以看到小目标的定义是目标框的长宽0×0~32×32 之间的物体。 但在整体的数据集中,小、中、大目标的占比并不均衡。41.4% ,数量比中目标和大目标都要多。 但在所有的训练集图片中,只有52.3% 的图片有小目标,而中目标和大目标的分布相对来说更加均匀一些。 针对这种状况,Yolov4的作者采用了Mosaic数据增强 的方式。 此外,发现另一研究者的训练方式 也值得借鉴,采用的数据增强和Mosaic比较类似,也是使用4张图片 (不是随机分布 ),但训练计算loss时,采用“缺啥补啥 ”的思路: 如果上一个iteration中,小物体产生的loss不足 (比如小于某一个阈值),则下一个iteration就用拼接图 ;否则就用正常图片 训练,也很有意思。 参考链接:https://www.zhihu.com/question/390191723?rf=390194081 4.3.2 BackBone创新 (1)CSPDarknet53 CSPDarknet53 是在Yolov3主干网络Darknet53 的基础上,借鉴2019年CSPNet 的经验,产生的Backbone 结构,其中包含了5个CSP 模块。这里因为CSP模块 比较长,不放到本处,大家也可以点击Yolov4的netron网络结构图,对比查看,一目了然。 每个CSP模块前面的卷积核的大小都是3*3,因此可以起到下采样的作用。 因为Backbone有5个CSP模块 ,输入图像是608*608 ,所以特征图变化的规律是:608->304->152->76->38->19 而且作者只在Backbone中采用了Mish激活函数 ,网络后面仍然采用Leaky_relu激活函数。 我们再看看下作者为啥要参考2019年的CSPNet ,采用CSP模块? CSPNet论文地址: arxiv.org/pdf/1911.1192 CSPNet全称是Cross Stage Paritial Network,主要从网络结构设计的角度解决推理中从计算量很大的问题。 CSPNet的作者认为推理计算过高的问题是由于网络优化中的梯度信息重复 导致的。 因此采用CSP模块先将基础层的特征映射划分为两部分,然后通过跨阶段层次结构将它们合并,在减少了计算量的同时可以保证准确率。 因此Yolov4在主干网络Backbone采用CSPDarknet53网络结构,主要有三个方面的优点: 优点一: 增强CNN的学习能力,使得在轻量化的同时保持准确性。(2)Mish激活函数 论文地址:arxiv.org/abs/1908.0868 Yolov4的Backbone 中都使用了Mish激活函数 ,而后面的网络则还是使用leaky_relu函数。 Yolov4作者实验测试时,使用CSPDarknet53 网络在ImageNet数据集 上做图像分类任务,发现使用了Mish激活函数的TOP-1 和TOP-5 的精度比没有使用时都略高一些。 因此在设计Yolov4目标检测任务时,主干网络Backbone还是使用Mish激活函数。 (3)Dropblock Yolov4中使用的Dropblock ,其实和常见网络中的Dropout功能类似,也是缓解过拟合的一种正则化方式。 Dropblock在2018年提出,论文地址:arxiv.org/pdf/1810.1289 传统的Dropout很简单,一句话就可以说的清:随机删除减少神经元的数量,使网络变得更简单。 而Dropblock和Dropout相似,比如下图: 中间Dropout的方式会随机的删减丢弃一些信息,但Dropblock的研究者 认为,卷积层对于这种随机丢弃并不敏感,因为卷积层通常是三层连用:卷积+激活+池化层 ,池化层本身就是对相邻单元起作用。而且即使随机丢弃,卷积层仍然可以从相邻的激活单元学习到相同的信息 。 因此,在全连接层上效果很好的Dropout在卷积层上效果并不好 。 所以右图Dropblock的研究者 则干脆整个局部区域进行删减丢弃。 这种方式其实是借鉴2017年的cutout数据增强 的方式,cutout是将输入图像的部分区域清零,而Dropblock则是将Cutout应用到每一个特征图。而且并不是用固定的归零比率,而是在训练时以一个小的比率开始,随着训练过程线性的增加这个比率 。 Dropblock 的研究者与Cutout 进行对比验证时,发现有几个特点:优点二: Cutout只能作用于输入层,而Dropblock则是将Cutout应用到网络中的每一个特征图上优点三: Dropblock可以定制各种组合,在训练的不同阶段可以修改删减的概率,从空间层面和时间层面,和Cutout相比都有更精细的改进。Yolov4 中直接采用了更优的Dropblock ,对网络的正则化过程进行了全面的升级改进。4.3.3 Neck创新 在目标检测领域,为了更好的提取融合特征,通常在Backbone 和输出层 ,会插入一些层,这个部分称为Neck。相当于目标检测网络的颈部,也是非常关键的。 Yolov4的Neck结构主要采用了SPP模块 、FPN+PAN 的方式。 (1)SPP模块 SPP模块,其实在Yolov3中已经存在了,在Yolov4 的C++代码文件夹中 有一个Yolov3_spp版本 ,但有的同学估计从来没有使用过,在Yolov4中,SPP模块仍然是在Backbone主干网络之后: 作者在SPP模块中,使用k={1*1,5*5,9*9,13*13}的最大池化的方式,再将不同尺度的特征图进行Concat操作。 和Yolov4作者的研究相同,采用SPP模块 的方式,比单纯的使用k*k最大池化 的方式,更有效的增加主干特征的接收范围,显著的分离了最重要的上下文特征。 Yolov4的作者在使用608*608 大小的图像进行测试时发现,在COCO目标检测任务中,以0.5%的额外计算代价将AP50增加了2.7%,因此Yolov4中也采用了SPP模块 。 (2)FPN+PAN PAN结构 比较有意思,看了网上Yolov4关于这个部分的讲解,大多都是讲的比较笼统的,而PAN是借鉴图像分割领域PANet 的创新点,有些同学可能不是很清楚。下面大白将这个部分拆解开来,看下Yolov4中是如何设计的。 可以看到经过几次下采样,三个紫色箭头指向的地方,输出分别是76*76、38*38、19*19。 以及最后的Prediction 中用于预测的三个特征图①19*19*255、②38*38*255、③76*76*255。 我们将Neck部分用立体图画出来,更直观的看下两部分之间是如何通过FPN结构 融合的。 如图所示,FPN是自顶向下的,将高层的特征信息通过上采样 的方式进行传递融合,得到进行预测的特征图。 而Yolov4中Neck这部分除了使用FPN外,还在此基础上使用了PAN结构: 前面CSPDarknet53中讲到,每个CSP模块前面的卷积核都是3*3大小 ,相当于下采样操作。 因此可以看到三个紫色箭头处的特征图是76*76、38*38、19*19。 以及最后Prediction中用于预测的三个特征图:①76*76*255,②38*38*255,③19*19*255。 我们也看下Neck 部分的立体图像,看下两部分是如何通过FPN+PAN结构 进行融合的。 和Yolov3的FPN层不同,Yolov4在FPN层的后面还添加了一个自底向上的特征金字塔。 这样结合操作,FPN层自顶向下传达强语义特征 ,而特征金字塔则自底向上传达强定位特征 ,两两联手,从不同的主干层对不同的检测层进行参数聚合,这样的操作确实很皮。 FPN+PAN 借鉴的是18年CVPR的PANet ,当时主要应用于图像分割领域 ,但Alexey将其拆分应用到Yolov4中,进一步提高特征提取的能力。Yolov3的FPN层输出的三个大小不一的特征图①②③直接进行预测 但Yolov4的FPN层,只使用最后的一个76*76特征图①,而经过两次PAN结构,输出预测的特征图②和③。 这里的不同也体现在cfg文件中,这一点有很多同学之前不太明白, 第一个Yolo层是最小的特征图19*19 ,mask=6,7,8 ,对应最大的anchor box。 第二个Yolo层是中等的特征图38*38 ,mask=3,4,5 ,对应中等的anchor box。 第三个Yolo层是最大的特征图76*76 ,mask=0,1,2 ,对应最小的anchor box。 第一个Yolo层是最大的特征图76*76 ,mask=0,1,2 ,对应最小的anchor box。 第二个Yolo层是中等的特征图38*38 ,mask=3,4,5 ,对应中等的anchor box。 第三个Yolo层是最小的特征图19*19 ,mask=6,7,8 ,对应最大的anchor box。 原本的PANet网络的PAN结构 中,两个特征图结合是采用shortcut 操作,而Yolov4中则采用concat(route) 操作,特征图融合后的尺寸发生了变化。 这里也可以对应Yolov4的netron网络图查看,很有意思。 4.3.4 Prediction创新 (1)CIOU_loss 目标检测任务的损失函数一般由Classificition Loss(分类损失函数) 和Bounding Box Regeression Loss(回归损失函数) 两部分构成。 Bounding Box Regeression的Loss近些年的发展过程是:Smooth L1 Loss-> IoU Loss(2016)-> GIoU Loss(2019)-> DIoU Loss(2020)->CIoU Loss(2020) 我们从最常用的IOU_Loss 开始,进行对比拆解分析,看下Yolov4为啥要选择CIOU_Loss。 可以看到IOU的loss其实很简单,主要是交集/并集 ,但其实也存在两个问题。 问题1: 即状态1的情况,当预测框和目标框不想交时,IOU=0,无法反应两个框距离的远近,此时损失函数不可导,IOU_Loss无法优化两个框不相交的情况。问题2: 即状态2和状态3的情况,当两个预测框大小相同,两个IOU也相同,IOU_Loss无法区分两者相交情况的不同。GIOU_中,增加了相交尺度的衡量方式,缓解了单纯IOU时的尴尬。 问题 :状态1、2、3都是预测框在目标框内部且预测框大小一致的情况,这时预测框和目标框的差集都是相同的,因此这三种状态的GIOU值 也都是相同的,这时GIOU退化成了IOU,无法区分相对位置关系。2020年 的AAAI又提出了DIOU_Loss 。好的目标框回归函数应该考虑三个重要几何因素:重叠面积、中心点距离,长宽比。 针对IOU和GIOU存在的问题,作者从两个方面进行考虑 针对第一个问题,提出了DIOU_Loss(Distance_IOU_Loss) DIOU_Loss考虑了重叠面积 和中心点距离 ,当目标框包裹预测框的时候,直接度量2个框的距离,因此DIOU_Loss收敛的更快。 但就像前面好的目标框回归函数所说的,没有考虑到长宽比。 比如上面三种情况,目标框包裹预测框,本来DIOU_Loss可以起作用。 但预测框的中心点的位置都是一样的,因此按照DIOU_Loss的计算公式,三者的值都是相同的。 针对这个问题,又提出了CIOU_Loss,不对不说,科学总是在解决问题中,不断进步!! CIOU_Loss和DIOU_Loss前面的公式都是一样的,不过在此基础上还增加了一个影响因子,将预测框和目标框的长宽比都考虑了进去。 其中v是衡量长宽比一致性的参数,我们也可以定义为: 这样CIOU_Loss就将目标框回归函数应该考虑三个重要几何因素:重叠面积、中心点距离,长宽比全都考虑进去了。 IOU_Loss: 主要考虑检测框和目标框重叠面积。GIOU_Loss: 在IOU的基础上,解决边界框不重合时的问题。DIOU_Loss: 在IOU和GIOU的基础上,考虑边界框中心点距离的信息。CIOU_Loss: 在DIOU的基础上,考虑边界框宽高比的尺度信息。Yolov4中采用了CIOU_Loss 的回归方式,使得预测框回归的速度和精度 更高一些。 (2)DIOU_nms Nms主要用于预测框的筛选,常用的目标检测算法中,一般采用普通的nms的方式,Yolov4则借鉴上面D/CIOU loss的论文:arxiv.org/pdf/1911.0828 在上图重叠的摩托车检测中,中间的摩托车因为考虑边界框中心点的位置信息,也可以回归出来。 因此在重叠目标的检测中,DIOU_nms 的效果优于传统的nms 。 总体来说, YOLOv4的论文称的上良心之作,将近几年关于深度学习领域最新研究的tricks移植到Yolov4中做验证测试,将Yolov3的精度提高了不少。虽然没有全新的创新,但很多改进之处都值得借鉴,借用Yolov4作者的总结。 (1)提出了一种高效而强大的目标检测模型,使用 1080Ti 或 2080Ti 就能训练出超快、准确的目标检测器。 (2)在检测器训练过程中,验证了最先进的一些研究成果对目标检测器的影响。 (3)改进了 SOTA 方法,使其更有效、更适合单 GPU 训练。 5.YoloV4相关代码5.1 python代码 代码地址: https://github.com/Tianxiaomo/pytorch-Yolov4 5.2 C++代码 Yolov4作者Alexey的代码,俄罗斯的大神,应该是个独立研究员,更新算法的频繁程度令人佩服。 在Yolov3作者Joseph Redmon宣布停止更新Yolo算法之后,Alexey凭借对于Yolov3算法的不断探索研究,赢得了Yolov3作者的认可,发布了Yolov4。 代码地址: https://github.com/AlexeyAB/darknet 5.3 python版本的Tensorrt代码 目前测试有效的有tensorflow版本:weights->pb->trt 代码地址: https://github.com/hunglc007/tensorflow-Yolov4-tflite 5.4 C++版本的Tensorrtrt代码 代码地址: https://github.com/wang-xinyu/tensorrtx/tree/master/Yolov4 作者自定义了mish激活函数的plugin层,Tensorrt加速后速度还是挺快的。 6.相关数据集下载项目中,目标检测算法应该的非常多非常多,比如人脸识别,比如疫情期间的口罩人脸识别,比如车流统计,人流统计等等。 因此大白也会将不错的值得一试的目标检测数据集汇总到此处,方便需要的同学进行下载。 6.1 口罩遮挡人脸数据集 数据集详情: 由武汉大学多媒体研究中心发起,目前是全球最大的口罩遮挡人脸数据集。分为真实口罩人脸和模拟口罩人脸两部分,真实口罩人脸包含525人的5000张口罩人脸和9万张正常人脸。模拟口罩人脸包含1万个人共50万张模拟人脸数据集。 数据集地址 :https://github.com/X-zhangyang/Real-World-Masked-Face-Dataset 6.2 Wider Face人脸数据集 数据集详情:香港中文大学发起的,包含3万张图片共40万张人脸。 数据集地址: http://shuoyang1213.me/WIDERFACE/WiderFace_Results.html 6.3 Wider Person拥挤场景行人数据集 数据集详情:多种场景比较拥挤场景的行人检测数据集,包含13382张图片,共计40万个不同遮挡程度的人体。 数据集地址: http://www.cbsr.ia.ac.cn/users/sfzhang/WiderPerson/ 因为工作原因,会搜集大量的各类公开应用场景数据集,如果有同学需要其他场景或者其他项目的,也可以留言,或者发送邮件到jiangdabai@126.com,也会将对应的数据集更新到此处。 7.不断更新ing在深度学习的图像领域,肯定会涉及目标检测,而在目标检测中,Yolov3是非常经典,必须要学习的算法,有些同学,特别新接触的同学,刚学习时会觉得yolo算法很繁琐。 但我发现,网上很多的教程其实讲的还是比较笼统,并不适合小白学习 。 所以大白也在耗尽洪荒之力,在准备Yolov3 和Yolov4及相关的基础入门视频 ,让大家看完就能明白整体的流程和各种算法细节,大家可以先收藏 ,后期制作好后会更新到此处。 希望和大家一起努力,在人工智能深度学习领域一起进步,一起提升,一起变强!