
可以估计不确定性的神经网络:SDE-Net
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

不确定性
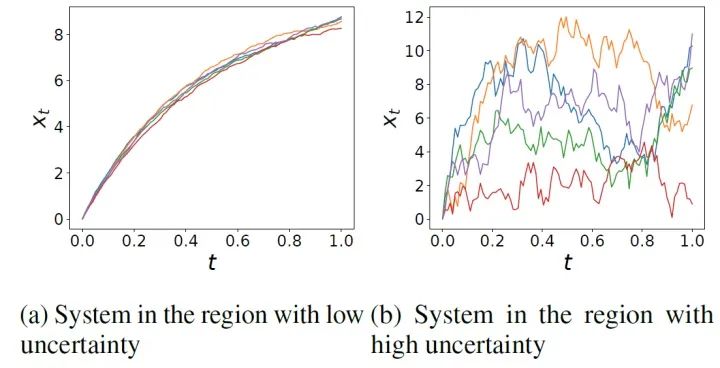
aleatoric uncertainty:来自于任务本身所固有的自然随机性(比如说label噪声等) epistemic uncertainty:由于缺乏训练数据所导致的,模型对于训练数据分布之外的样本是无知的

SDE量化不确定性
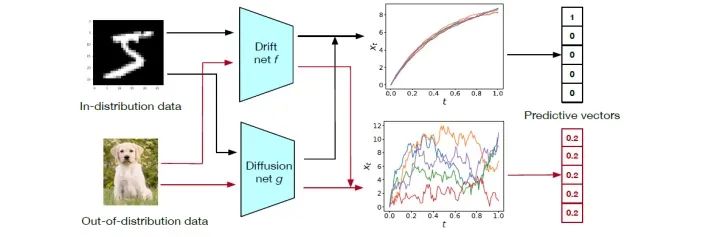
模型构造
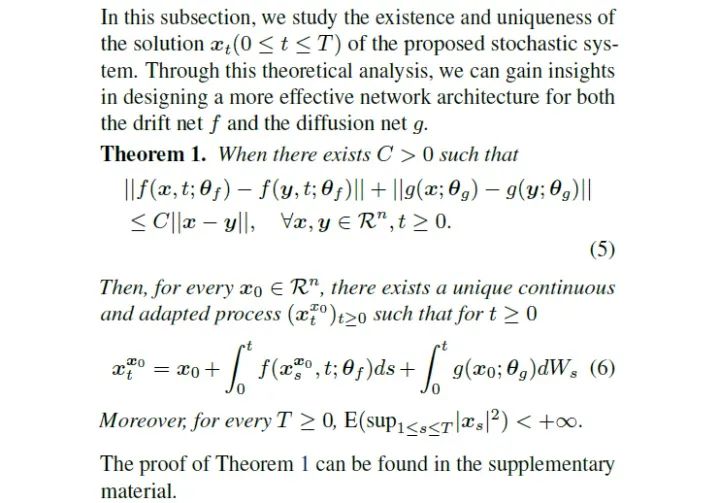
理论分析
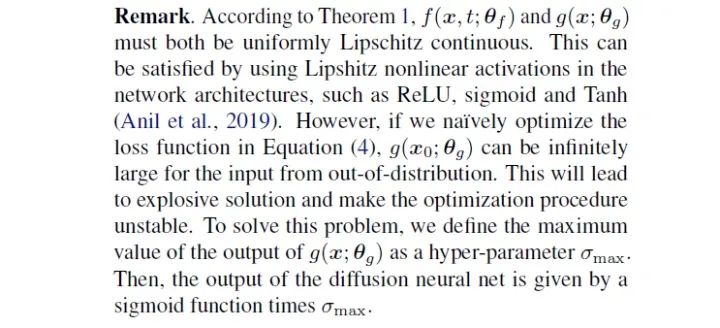
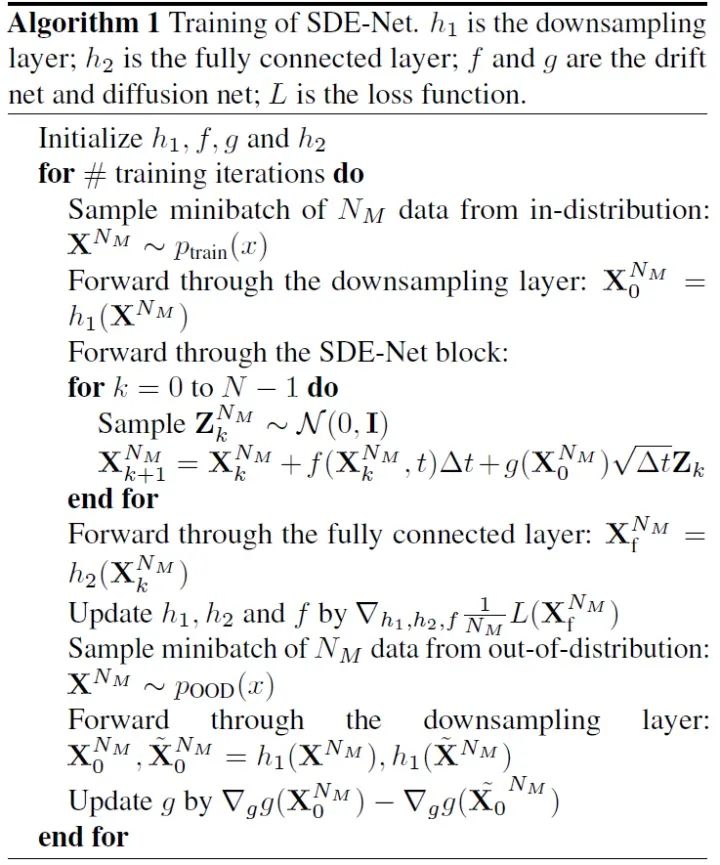
模型训练
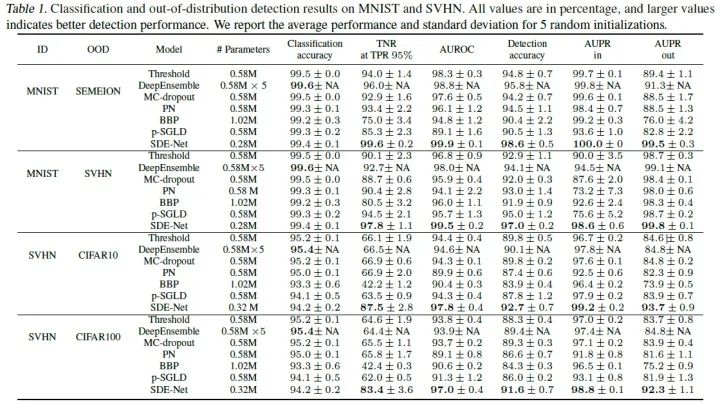
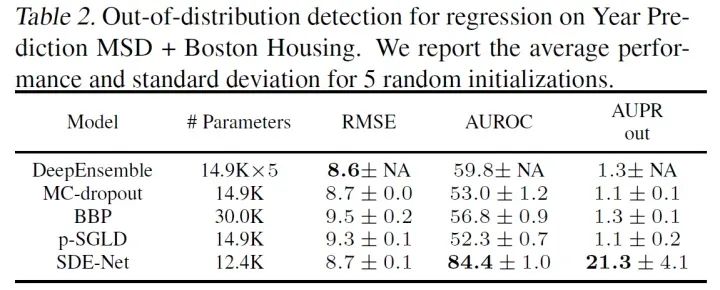
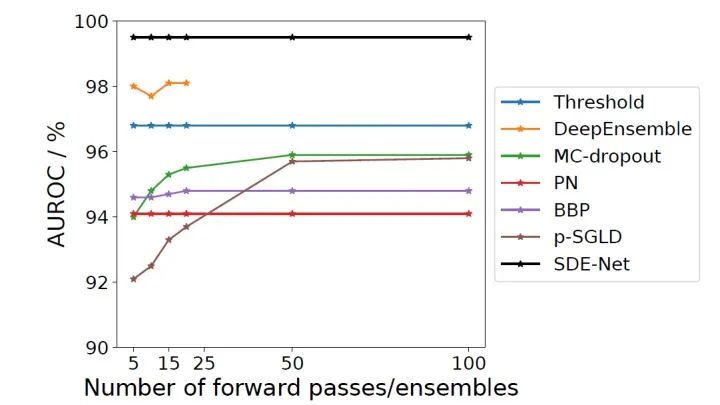
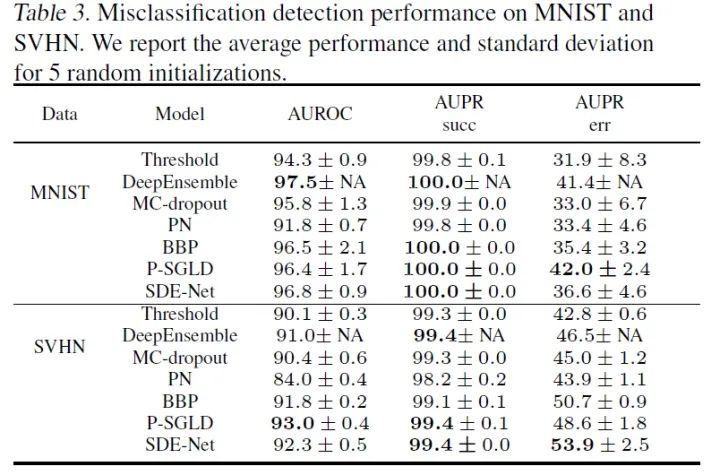
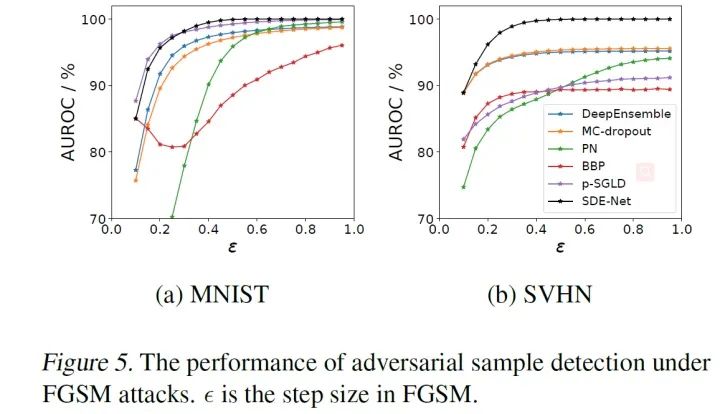
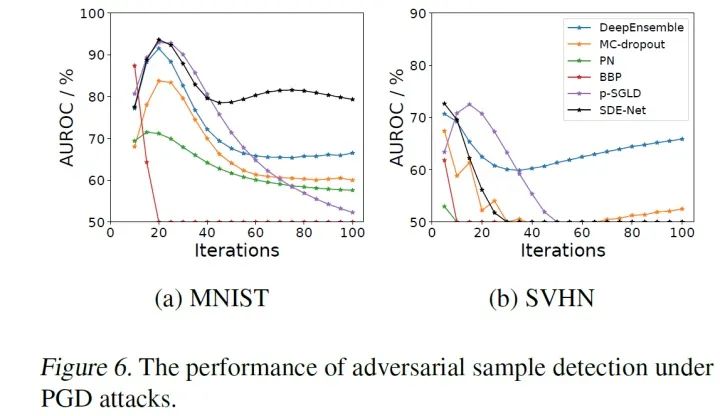
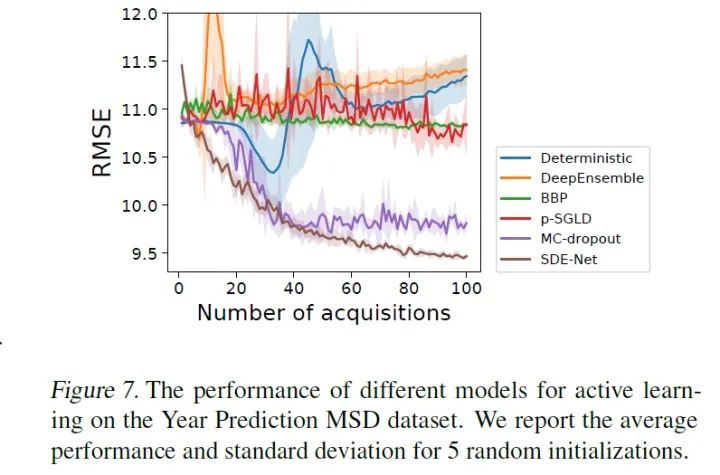
实验
True negative rate (TNR) at 95% true positive rate (TPR) Area under the receiver operating characteristic curve (AUROC) Area under the precision-recall curve (AUPR) Detection accuracy
总结
参考文献
好消息!
小白学视觉知识星球
开始面向外开放啦👇👇👇
下载1:OpenCV-Contrib扩展模块中文版教程 在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。 下载2:Python视觉实战项目52讲 在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。 下载3:OpenCV实战项目20讲 在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。 交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
评论