
(附代码)学习Opencv不得不掌握的操作
点击左上方蓝字关注我们

#include<opencv2\opencv.hpp>
#include<opencv2\highgui\highgui.hpp>
using namespace std;
using namespace cv;
int main(int argc, char** argv)
{
//这些方式都是自己拥有独立的内存空间
Mat img1(2, 2, CV_8UC3, Scalar(0, 0, 255));
cout << img1 << endl;
int sz[3] = { 2,2,2 };
Mat img2(3, sz, CV_8UC1, Scalar(0, 0, 0));
//cout << img2 << endl;
Mat img5;
img5.create(4, 4, CV_8UC3);
cout << img5 << endl;
Mat img6 = Mat::zeros(4, 4, CV_8UC3);
cout << img6 << endl;
Mat img7 = img6.clone();
cout << img7 << endl;
Mat img8;
img6.copyTo(img8);
cout << img8 << endl;
//下面都是浅拷贝,指针指向同一个实例
Mat img9 = img8;
Mat img10(img8);
waitKey(0);
return 0;
}两种方法,全局固定阈值二值化和局部自适应阈值二值化全局固定阈值很容易理解,就是对整幅图像都是用一个统一的阈值来进行二值化;局部自适应阈值则是根据像素的邻域块的像素值分布来确定该像素位置上的二值化阈值。
#include<opencv2\opencv.hpp>
#include<opencv2\highgui\highgui.hpp>
using namespace std;
using namespace cv;
int main(int argc, char** argv)
{
Mat image = imread("lol1.jpg", CV_LOAD_IMAGE_GRAYSCALE); //注意了,必须是载入灰度图
if (image.empty())
{
cout << "read image failure" << endl;
return -1;
}
// 全局二值化
int th = 100;
Mat global;
threshold(image, global, th, 255, CV_THRESH_BINARY_INV);
// 局部二值化
int blockSize = 25;
int constValue = 10;
Mat local;
adaptiveThreshold(image, local, 255, CV_ADAPTIVE_THRESH_MEAN_C, CV_THRESH_BINARY_INV, blockSize, constValue);
imshow("全局二值化", global);
imshow("局部二值化", local);
waitKey(0);
return 0;
}原始图

两种二值化效果对比
#include <iostream>
#include <opencv2\opencv.hpp>
using namespace cv;
using namespace std;
int main()
{
Mat SrcPic = imread("lena.jpg");
imshow("Src Pic", SrcPic);
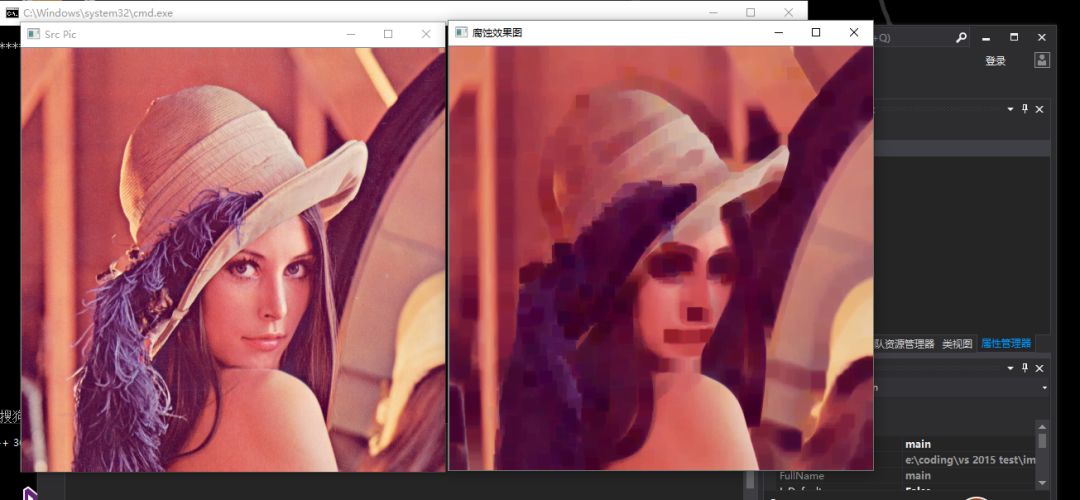
Mat element = getStructuringElement(MORPH_RECT, Size(15, 15)); //getStructuringElement函数返回的是指定形状和尺寸的结构元素
Mat DstPic;
erode(SrcPic, DstPic, element); //腐蚀操作
imshow("腐蚀效果图", DstPic);
waitKey();
return 0;
}运行效果
#include <iostream>
#include <opencv2\opencv.hpp>
using namespace cv;
using namespace std;
int main()
{
Mat SrcPic = imread("lena.jpg");
imshow("Src Pic", SrcPic);
Mat DstPic;
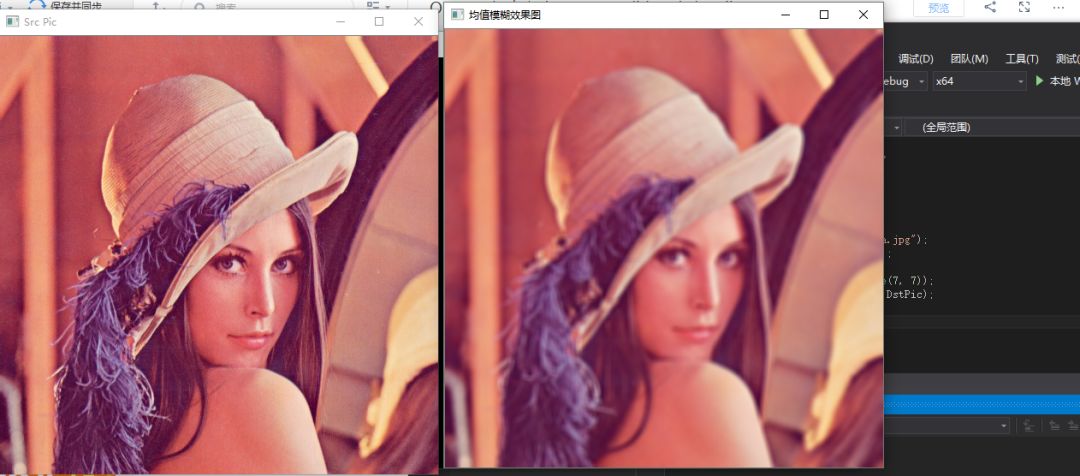
blur(SrcPic, DstPic, Size(7, 7));
imshow("均值模糊效果图", DstPic);
waitKey();
return 0;
}运行效果
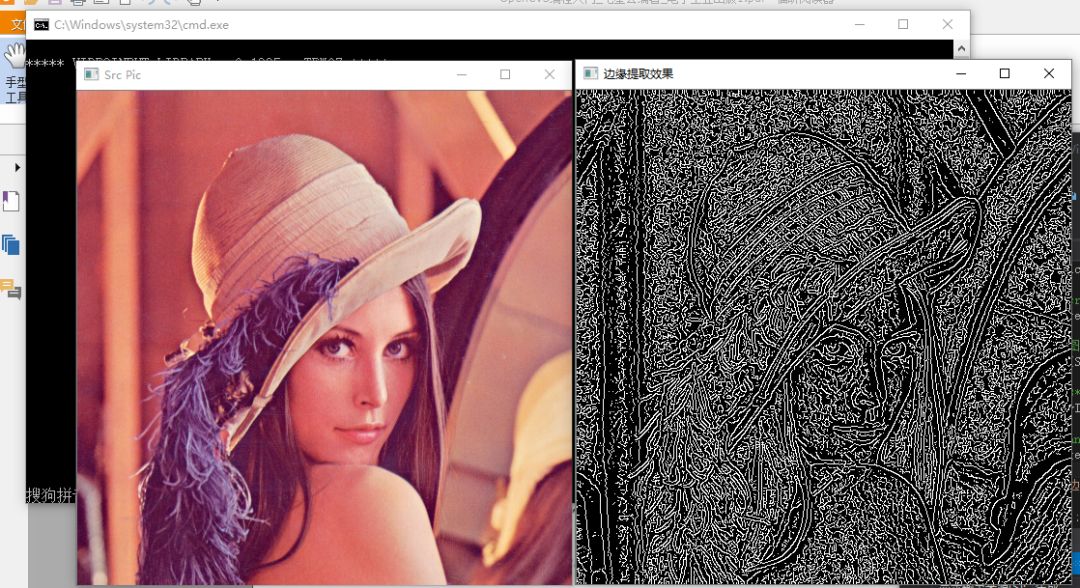
思路:将原始图像转化为灰度图,用blur函数进行图像模糊以降噪,然后用canny函数进行边缘检测。
#include <iostream>
#include <opencv2\opencv.hpp>
using namespace cv;
using namespace std;
int main()
{
Mat SrcPic = imread("lena.jpg");
imshow("Src Pic", SrcPic);
Mat DstPic, edge, grayImage;
//创建与src同类型和同大小的矩阵
DstPic.create(SrcPic.size(), SrcPic.type());
//将原始图转化为灰度图
cvtColor(SrcPic, grayImage, COLOR_BGR2GRAY);
//先使用3*3内核来降噪
blur(grayImage, edge, Size(3, 3));
//运行canny算子
Canny(edge, edge, 3, 9, 3);
imshow("边缘提取效果", edge);
waitKey();
return 0;
}运行效果
#include<opencv2\opencv.hpp>
#include<opencv2\highgui\highgui.hpp>
using namespace std;
using namespace cv;
int main()
{
Mat img = imread("lol1.jpg");
Mat dstImg;
cvtColor(img, dstImg,COLOR_BGR2GRAY);//从宏名字就可以知道,是彩色图转换到灰度图
imshow("灰度图", dstImg);
waitKey(0);
}灰度图

#include<opencv2\opencv.hpp>
#include<opencv2\highgui\highgui.hpp>
using namespace std;
using namespace cv;
//访问每个像素,我喜欢使用指针的方式
int main()
{
Mat img = imread("lol1.jpg");
for (int i = 0; i < img.rows; i++)
{
uchar* data = img.ptr<uchar>(i); //获取第i行地址
for (int j = 0; j < img.cols; j++)
{
printf("%d\n",data[j]);
}
}
waitKey(0);
}#include<opencv2\opencv.hpp>
#include<opencv2\highgui\highgui.hpp>
using namespace std;
using namespace cv;
//直方图均衡化
int main()
{
Mat img = imread("lol3.jpg");
imshow("原始图", img);
Mat dst;
cvtColor(img, img, CV_RGB2GRAY);
imshow("灰度图", img);
equalizeHist(img, dst);
imshow("直方图均衡化", dst);
waitKey(0);
}显然均衡化后的图片对比度变高了,变得更加明亮!

#include<opencv2\opencv.hpp>
#include<opencv2\highgui\highgui.hpp>
using namespace std;
using namespace cv;
//常见数据结构使用方法总结
int main()
{
//Mat的用法
Mat m1(2, 2, CV_8UC3, Scalar(0, 0, 255)); //其中的宏的解释:CV_[位数][带符号与否][类型前缀]C[通道数]
cout << m1 << endl;
//或者,利用IplImage指针来初始化,将IplImage*转化为Mat
IplImage* image = cvLoadImage("lena.jpg");
Mat mat = cvarrToMat(image);
//Mat转IplImage:
IplImage img = IplImage(mat);
//或者
Mat m2;
m2.create(4, 5, CV_8UC(2));
//点的表示:Point
Point p;
p.x = 1; //x坐标
p.y = 1; //y坐标
//或者
Point p2(1, 1);
//颜色的表示:Scalar(b,g,r);注意不是rgb,注意对应关系
Scalar(1, 1, 1);
//尺寸的表示:Size
Size(5, 5);// 宽度和高度都是5
//矩形的表示:Rect,成员变量有x,y,width,height
Rect r1(0, 0, 100, 60);
Rect r2(10, 10, 100, 60);
Rect r3 = r1 | r2; //两个矩形求交集
Rect r4 = r1 & r2; //两个矩形求并集
waitKey(0);
}END
评论