
双目线激光三维扫描技术原理剖析
点击下方卡片,关注“新机器视觉”公众号
视觉/图像重磅干货,第一时间送达
背景
激光扫描三维测量技术凭借其非接触、精度高、适用范围广等优点,目前已经成为工业领域中不可或缺的技术,具有很高的研究价值。该项技术被广泛用于产品缺陷检查、自动化装配、尺寸测量、文物重建和视觉导航等领域,具有非常高的实用价值。原理
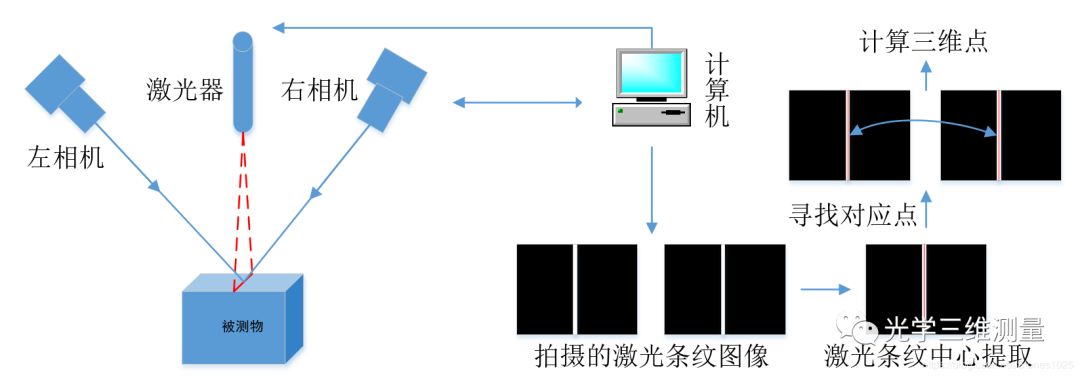
本文介绍的是一种基于线激光扫描和双目立体视觉相结合的三维测量系统,该种线激光扫描系统可以避免传统单相机扫描技术中标定激光平面的过程,提高三维测量精度。该测量系统由两个相机、一个先激光投射器和一个旋转电机组成,如图1所示,测量时通过向被测物体投射单条线激光条纹,然后由旋转电机带动激光条纹扫描整个被测物体,扫描的同时立体视觉系统以指定的帧率拍摄被测物体;根据所拍摄的含有激光条纹的立体图像对,由立体视觉的极线约束和激光条纹特征计算出立体视觉系统之间的对应性关系;最后根据预先标定好的系统参数按照双目立体视觉的方法计算出物体的三维点云数据。
算法流程
系统标定(单相机标定和立体视觉系统标定);

2. 立体视觉校正;


3.线激光条纹中心提取;
传统的线激光条纹提取技术有极值法、阈值法、高斯拟合法、灰度重心法等。

4.查找立体视觉对应性;
在双目线激光扫描三维测量系统中,使用两个约束来唯一确定立体视觉对应性。第一,极线约束;第二,线激光条纹的几何属性。使用该两个属性即可唯一确定立体视觉的对应点坐标。
5.三维重建。
该部分比较简单,直接使用光学三角法即可。
测量案例



来源:光学三维测量
声明:部分内容来源于网络,仅供读者学习、交流之目的。文章版权归原作者所有。如有不妥,请联系删除。
—THE END—
评论