
YOLO V4 Tiny改进版来啦!速度294FPS精度不减YOLO V4 Tiny
极市导读
YOLO V4 Tiny在2020.06.25的晚上就已正式发布,而YOLO V4 Tiny的改进版方法具有比YOLOv4-tiny和YOLOv3-tiny更快的目标检测速度,并且其平均精度的平均值与YOLOv4-tiny几乎相同。本文提出了一种基于YOLOv4-tiny的快速目标检测方法YOLO-v4目标检测、换脸、视频上色全部实时手机端实现,美国东北大学等提出全自动实时移动端AI框架并详细讲解了改进版的特点以及实验结果。>>加入极市CV技术交流群,走在计算机视觉的最前沿
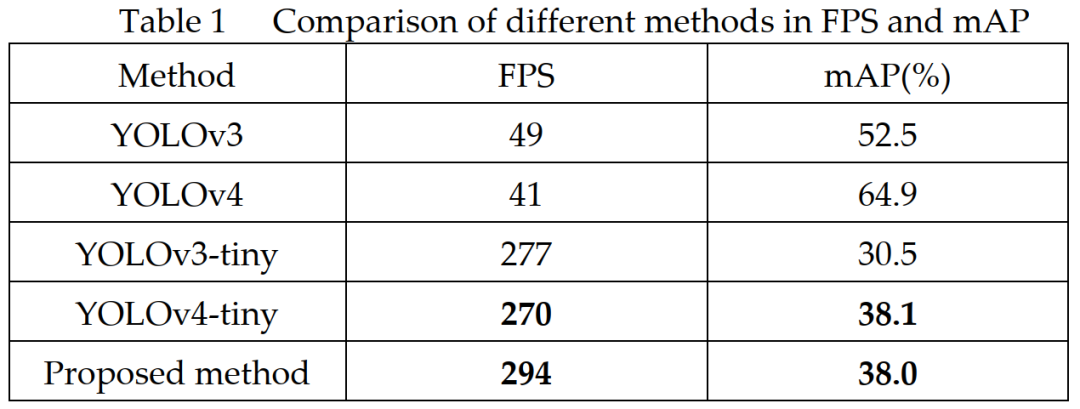
此YOLO V4 Tiny改进在保证精度的同时帧率可以达到294FPS!具有比YOLOv4-tiny(270 FPS)和YOLOv3-tiny更快的目标检测速度(277 FPS),并且其平均精度的平均值与YOLOv4-tiny几乎相同;
作者单位:东北电力大学, 北华大学
1、方法简介
2、YOLO V4 Tiny概要
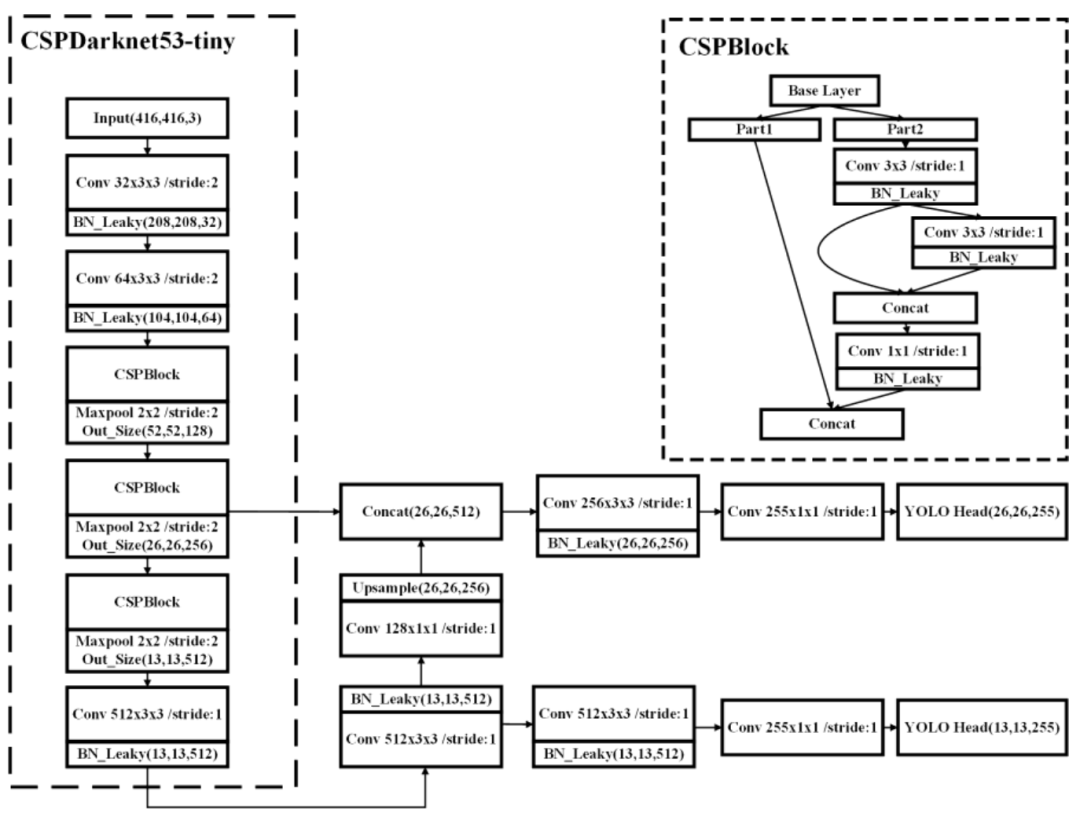
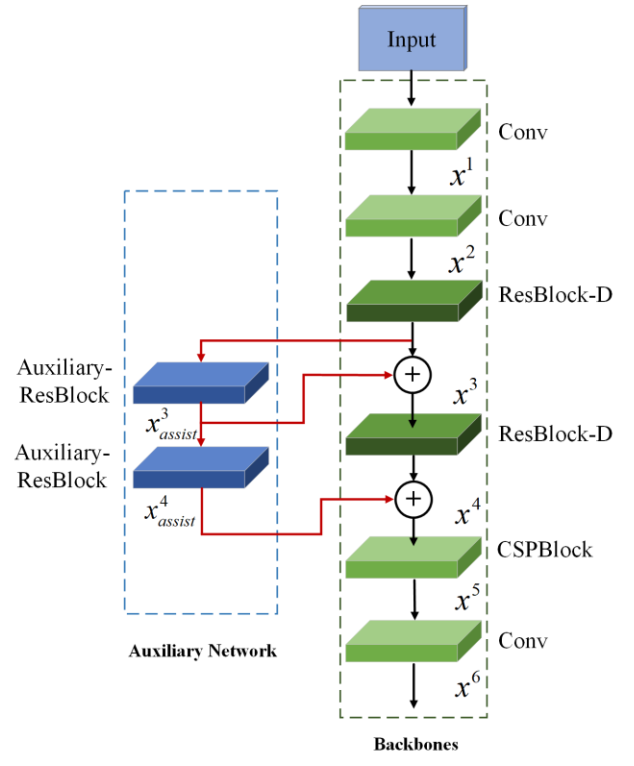
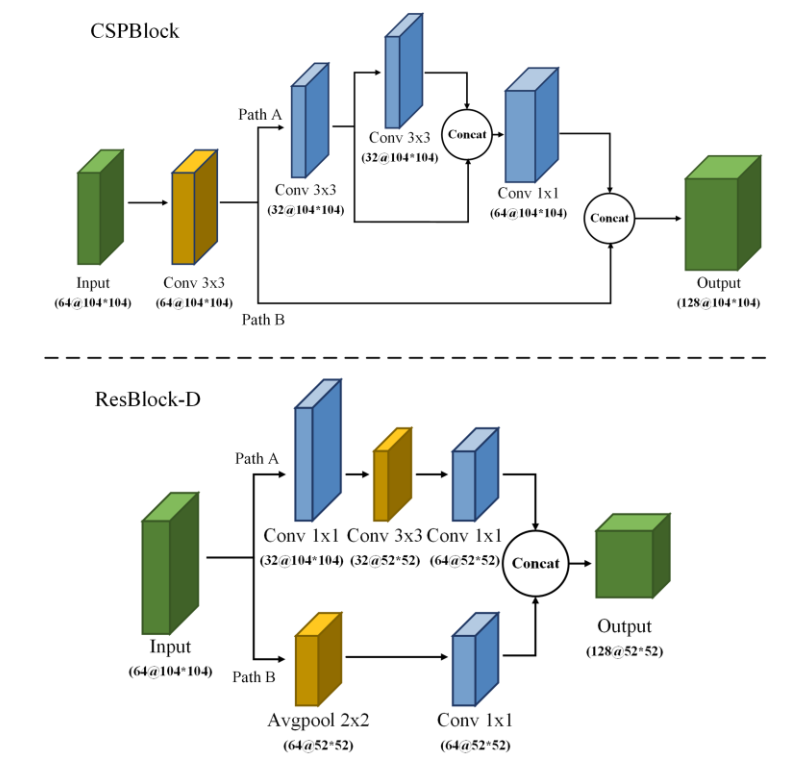
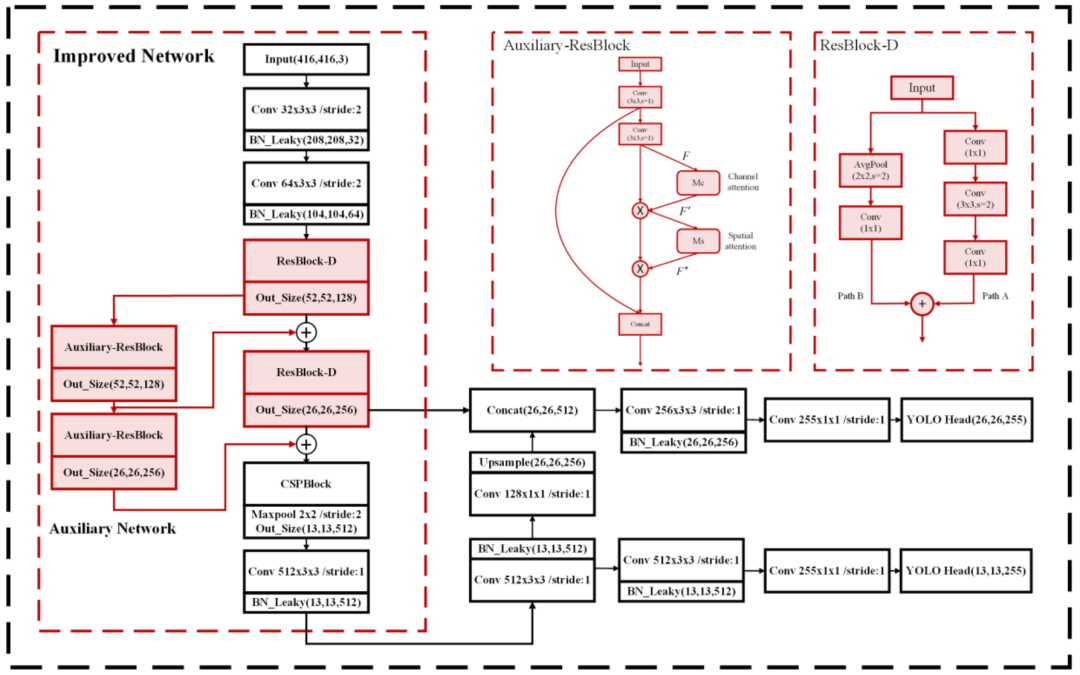
2.1、模型结构
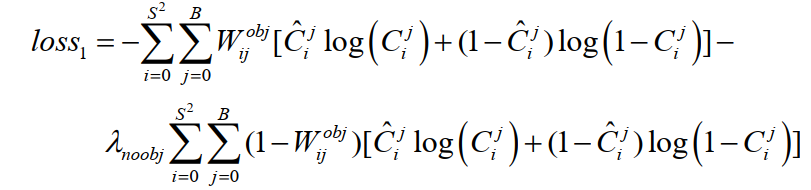
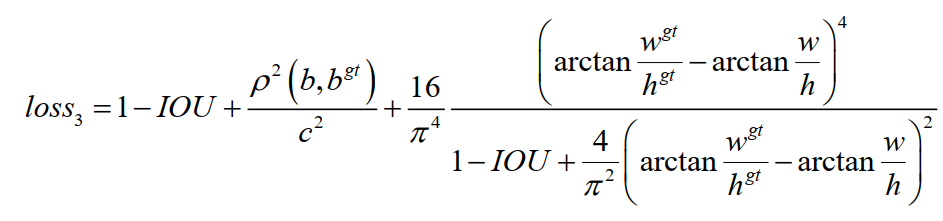
2.2、损失函数



3、改进YOLO Tiny算法
3.1、设计思路



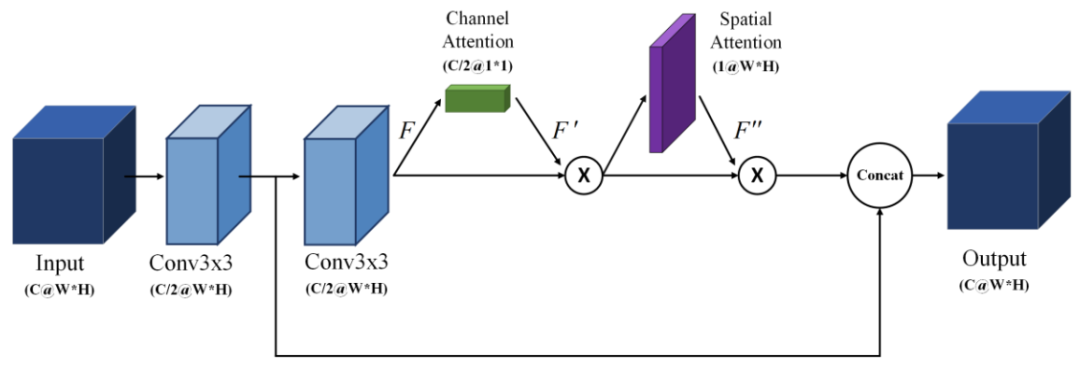
3.2、Auxiliary Network Block
4、实验结果
4.1、精度与速度
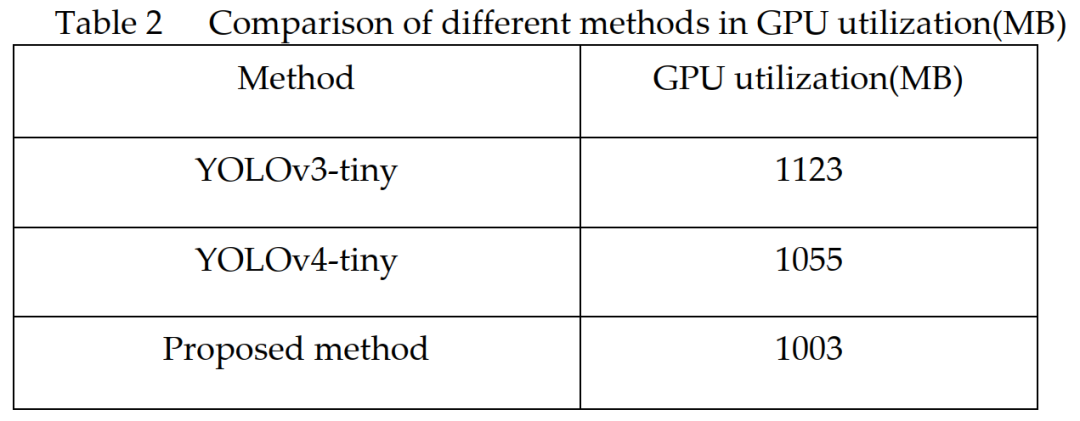
4.2、GPU占用率
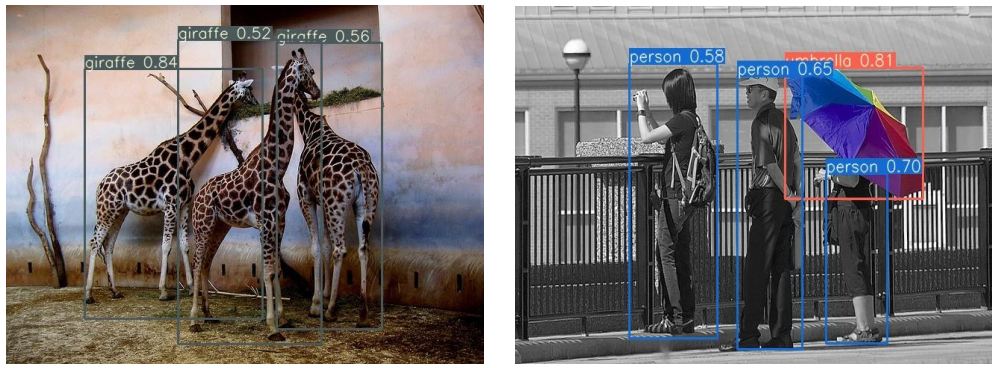
4.3、实际检测结果


参考
推荐阅读
评论