
检测三维物体?一篇文章认识《双目立体视觉》
来源:https://blog.csdn.net/qq_41204464/article/details/115387812
作者:一颗小树X@CSDN
前言
双目立体视觉,由两个摄像头组成,像人的眼睛能看到三维的物体,获取物体长度、宽度信息,和深度的信息;单目视觉获取二维的物体信息,即长度、宽度。
1)双目摄像头
双目摄像头示意图(ORBBEC® Gemini 3D传感摄像头是一款基于双目结构光3D成像技术的近距离高精度的嵌入式模组):

2)双目相机基线
基线越大,测量范围越远;基线越小,测量范围越近。

建议:
(1)基线距离是工作距离的08-2.2倍时测量误差比较小;
(2)双目立体视觉的结构对称时,测量系统的误差比较小,精度也比较高。
(3)两台相机的有效焦距∫越大,视场越小,视觉测量系统的测量精度越高(即采用长焦距镜头容易获得较高的测量精度)
3)打开双目摄像头
在OpenCV用使用双目摄像头,包括:打开单目摄像头、设置摄像头参数、拍照、录制视频。
环境编程语言:Python3 主要依赖库:OpenCV3.x 或 OpenCV4.x双目同步摄像头,两个镜头共用一个设备ID,左右摄像机同一频率。这款摄像头分辨率支持2560*960或以上。
思路流程:
1、由于两个镜头共用一个设备ID,打开摄像头时使用cv2.VideoCapture()函数,只需打开一次。区别有的双目摄像头是左右镜头各用一个设备ID,需要打开两次cv2.VideoCapture(0),cv2.VideoCapture(1)。
2、双目摄像头的总分辨率是由左右镜头组成的,比如:左右摄像机总分辨率1280x480;分割为左相机640x480、右相机640x480
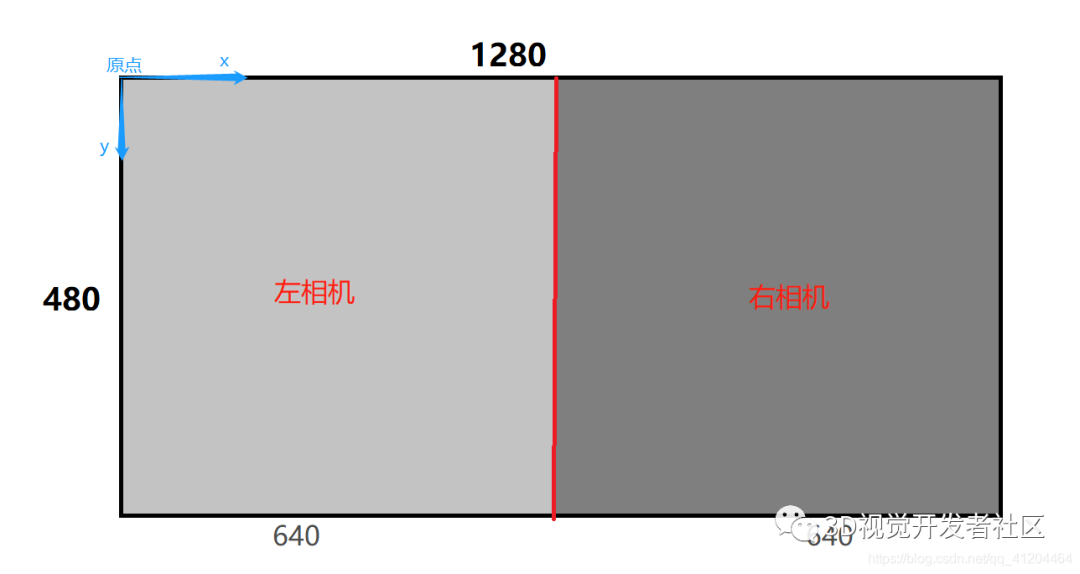
为了方便理解画了张草图;图中的“原点”是图像像素坐标系的原点。
3、分割后,左相机的分辨率:高度 0:480、宽度 0:640
右相机的分辨率:高度 0:480、宽度 640:1280
4、转换为代码后
# 读取摄像头数据ret, frame = camera.read()#裁剪坐标为[y0:y1, x0:x1] HEIGHT * WIDTHleft_frame = frame[0:480, 0:640]right_frame = frame[0:480, 640:1280]cv2.imshow("left", left_frame)cv2.imshow("right", right_frame)
源代码:
举个栗子:打开分辨率1280x480的双目摄像头
# -*- coding: utf-8 -*-import cv2import timeAUTO = False # 自动拍照,或手动按s键拍照INTERVAL = 2 # 自动拍照间隔cv2.namedWindow("left")cv2.namedWindow("right")camera = cv2.VideoCapture(0)# 设置分辨率 左右摄像机同一频率,同一设备ID;左右摄像机总分辨率1280x480;分割为两个640x480、640x480camera.set(cv2.CAP_PROP_FRAME_WIDTH,1280)camera.set(cv2.CAP_PROP_FRAME_HEIGHT,480)counter = 0utc = time.time()folder = "./SaveImage/" # 拍照文件目录def shot(pos, frame):global counterpath = folder + pos + "_" + str(counter) + ".jpg"cv2.imwrite(path, frame)print("snapshot saved into: " + path)while True:ret, frame = camera.read()# 裁剪坐标为[y0:y1, x0:x1] HEIGHT*WIDTHleft_frame = frame[0:480, 0:640]right_frame = frame[0:480, 640:1280]cv2.imshow("left", left_frame)cv2.imshow("right", right_frame)now = time.time()if AUTO and now - utc >= INTERVAL:shot("left", left_frame)shot("right", right_frame)counter += 1utc = nowkey = cv2.waitKey(1)if key == ord("q"):breakelif key == ord("s"):shot("left", left_frame)shot("right", right_frame)counter += 1camera.release()cv2.destroyWindow("left")cv2.destroyWindow("right")
补充理解:
OpenCV有VideoCapture()函数,能用来定义“摄像头”对象,0表示第一个摄像头(一般是电脑内置的摄像头);如果有两个摄像头,第二个摄像头则对应VideoCapture(1)。
在while循环中使用“摄像头对象”的read()函数一帧一帧地读取摄像头画面数据。
imshow函数是显示摄像头的某帧画面;cv2.waitKey(1)是等待1ms,如果期间检测到了键盘输入q,则退出while循环。
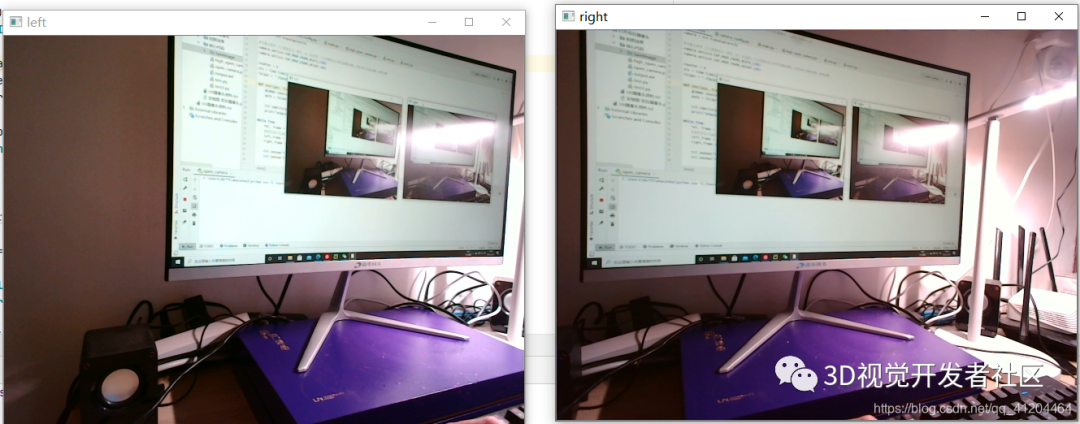
效果:
4)双目测距
原理:
通过对两幅图像视差的计算,直接对图像所拍摄到的范围进行距离测量,无需判断前方出现的是什么类型的障碍物。

视差disparity:
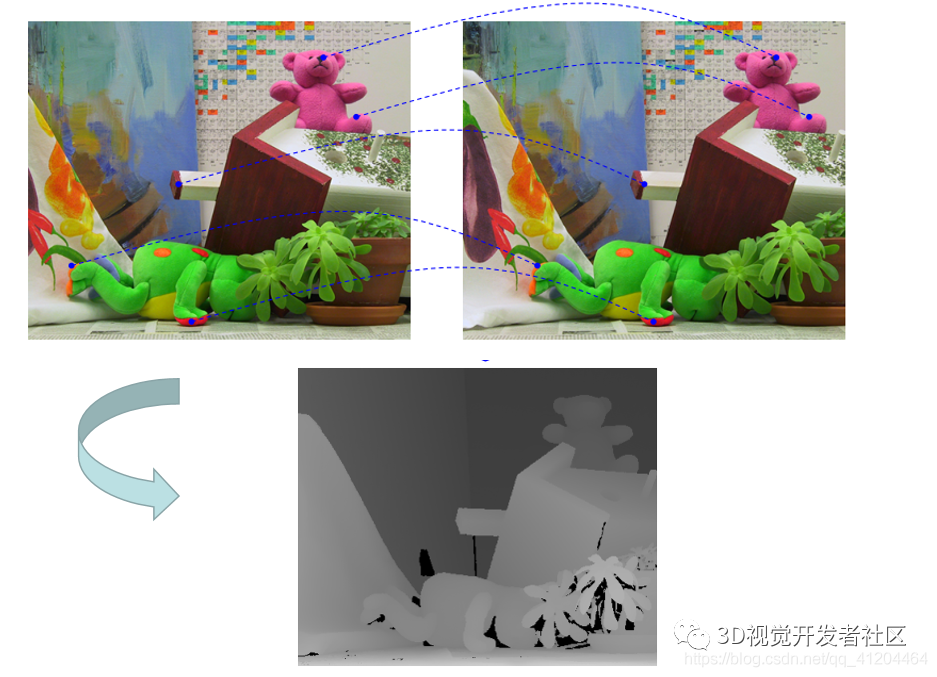
首先看一组视觉图:左相机图和右相机图不是完全一致的,通过计算两者的差值,形成视差,生成视差图(也叫:深度图)

视差是同一个空间点在两个相机成像中对应的x坐标的差值;
它可以通过编码成灰度图来反映出距离的远近,离镜头越近的灰度越亮;

我们观察一下,看到台灯在前面,离双目相机比较近,在灰度图呈现比较亮;摄影机及支架在后方,离双目相机比较远,在灰度图呈现比较暗。
补充理解:
由立体视觉系统测量的深度被离散成平行平面 (每个视差值一个对应一个平面)
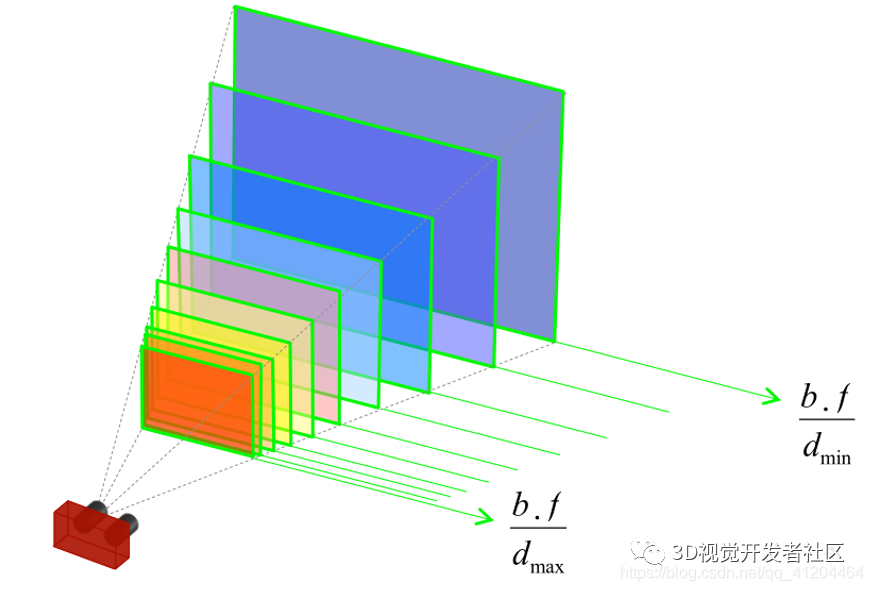
给定具有基线 b 和焦距 f 的立体装备, 系统的距离场受视差范围[dmin ,dmax]的约束。
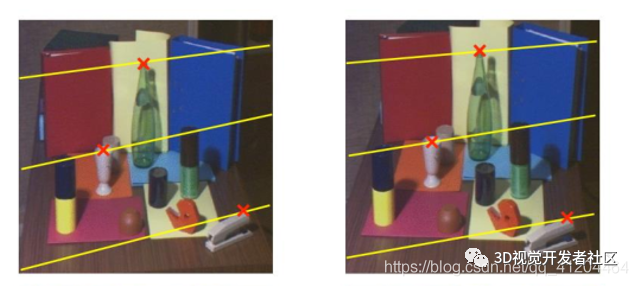
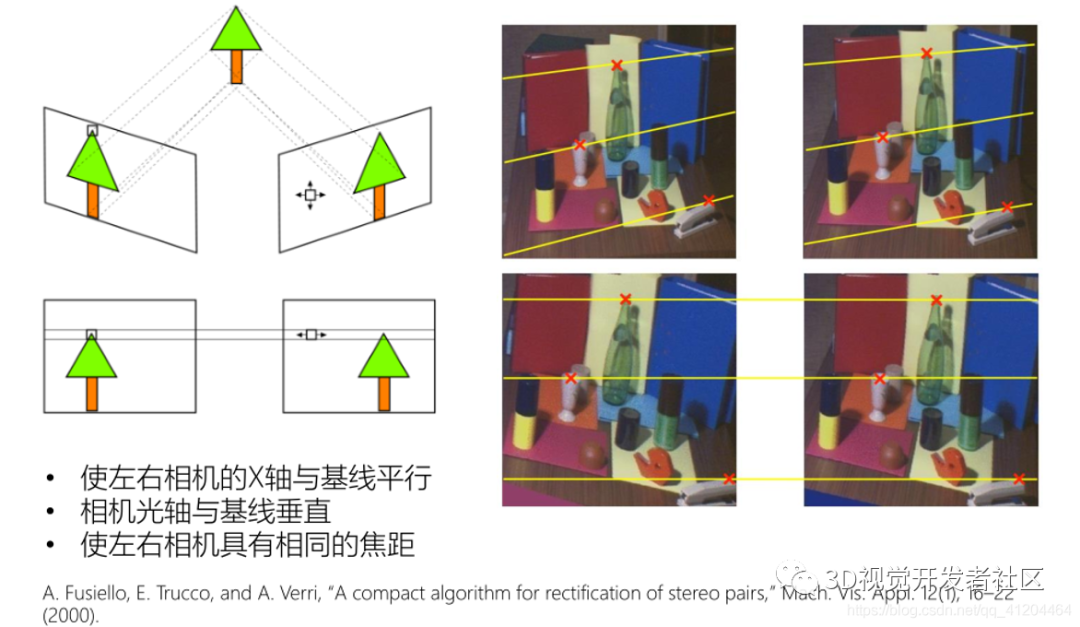
极线约束:
极线约束(Epipolar Constraint)是指当空间点在两幅图像上分别成像时,已知左图投影点p1,那么对应右图投影点p2一定在相对于p1的极线上,这样可以极大的缩小匹配范围。

标准形式的双目摄像头,左右相机对齐,焦距相同。

如果不是标准形式的双目摄像头呢?哦,它是是这样的:(需要 极线校正/立体校正)
极线校正/立体校正
双目测距流程:
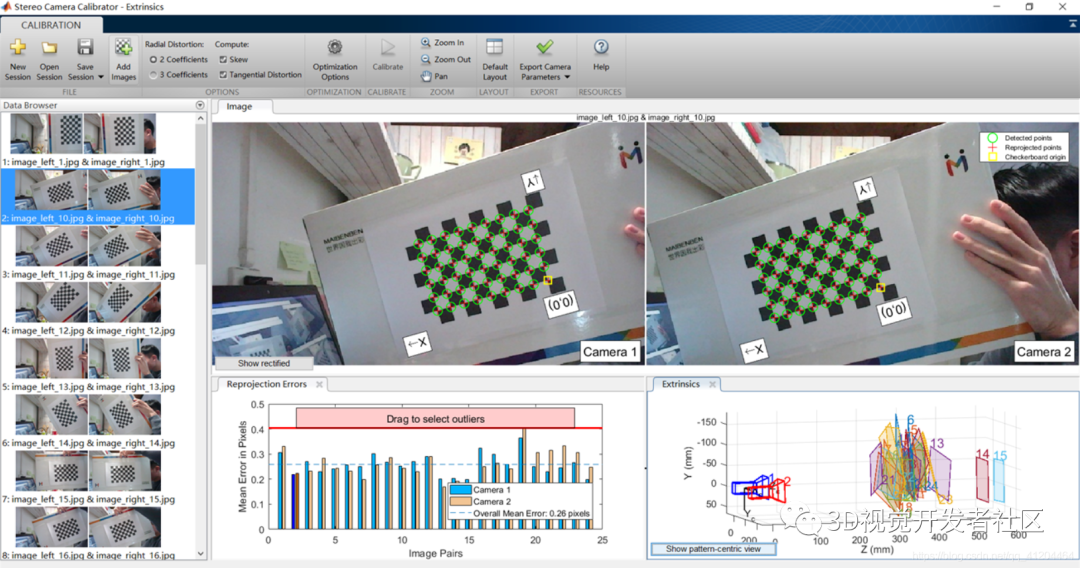
a.双目标定
主要是获取内参(左摄像头内参+右摄像头内参)、外参(左右摄像头之间平移向量+旋转矩阵)
标定过程:
b.双目矫正
消除镜头变形,将立体相机对转换为标准形式

c.立体匹配
寻找左右相机对应的点(同源点)

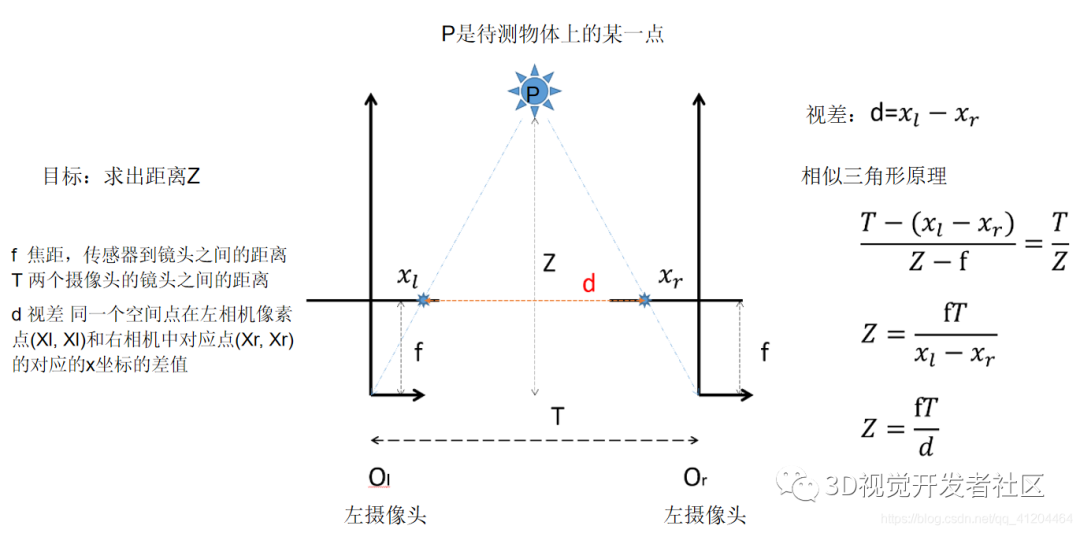
d.双目测距(三角测量)
给定视差图、基线和焦距,通过三角计算在3D中对应的位置

双目测距原理
e.测距效果

彩蛋:双目立体匹配(重点)
立体匹配是双目立体视觉中比较重要的一环,往往这里做研究和优化。
a.立体匹配流程
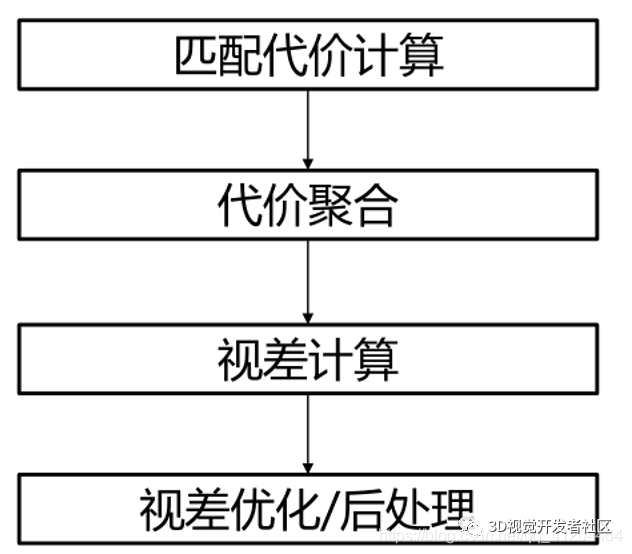
b.匹配代价计算
代价函数用于计算左、右图中两个像素之间的匹配代价(cost)。cost越大,表示这两个像素为对应点的可能性越低。

常用代价函数
AD/BT
AD+Gradient
Census transform
SAD/SSD
NCC
AD+Census
CNN
c.立体匹配

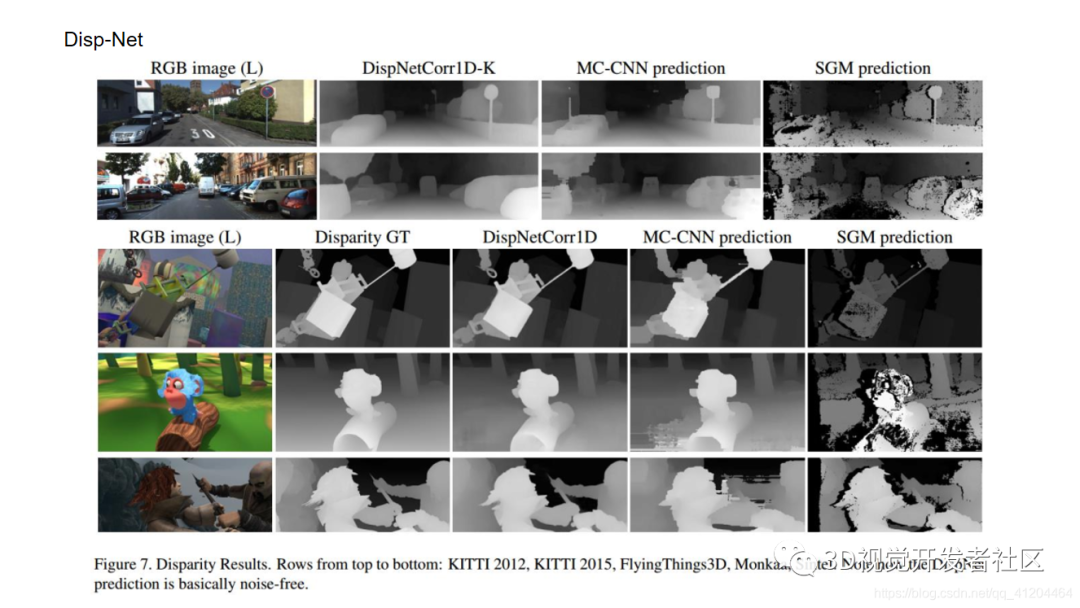
端到端视差计算网络
Disp-Net (2016)
GC-Net (2017)
iRestNet (2018)
PSM-Net (2018)
Stereo-Net (2018)
GA-Net (2019)
EdgeStereo (2020)
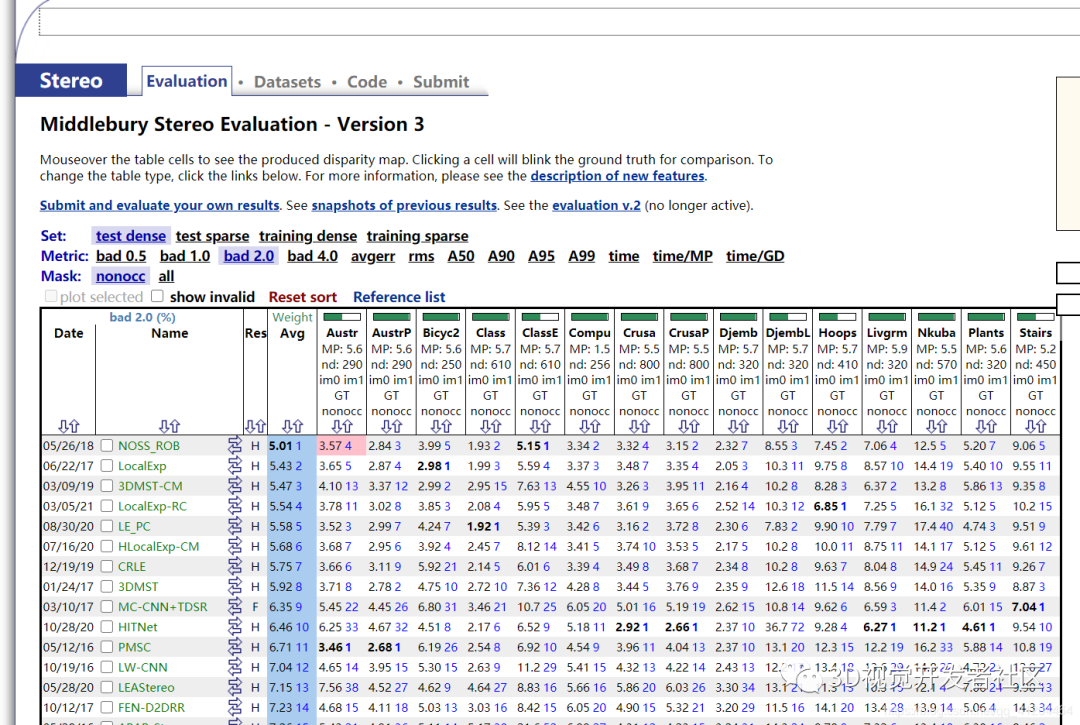
立体视觉方法评测网站
ETH3D https://www.eth3d.net/
Kitti Stereo http://www.cvlibs.net/datasets/kitti/eval_scene_flow.php?benchmark=stereo
Middlebury Stereo 3.0 https://vision.middlebury.edu/stereo/eval3/
双目测距总结
优势:
(1)成本比单目系统要高,但尚处于可接受范围内,并且与激光雷达等方案相比成本较低;
(2)没有识别率的限制,因为从原理上无需先进行识别再进行测算,而是对所有障碍物直接进行测量;
(3)直接利用视差计算距离,精度比单目高;
(4)无需维护样本数据库,因为对于双目没有样本的概念。
难点:
(1)计算量大,对计算单元的性能要求高,这使得双目系统的产品化、小型化的难度较;(芯片或FPGA)
(2)双目的配准效果,直接影响到测距的准确性;
(3)对环境光照非常敏感;(光照角度、光照强度)
(4)不适用于单调缺乏纹理的场景;(天空、白墙、沙漠)
(5)相机基线限制了测量范围。(基线越大,测量范围越远;基线越小,测量范围越近)
参考文献
1)[Wang 2015] Wang W, Yan J, Xu N, et al. Real-time high-quality stereo vision system in FPGA. IEEE Transactions on Circuitsand Systems for Video Technology, 2015, 25(10): 1696-1708.2)
2)[Kim 2016] K.-R. Kim and C.-S. Kim. Adaptive smoothness constraints for efficient stereo matching using texture and edgeinformation. ICIP 2016.
3)[Zbontar 2016] Zbontar J, LeCun Y. Stereo matching by training a convolutional neural network to compare image patches.Journal of Machine Learning Research, 2016.
4)[Park 2017] Park H, Lee K M. Look wider to match image patches with convolutional neural networks. IEEE Signal ProcessingLetters, 2017.
5)Leonid Keselman, et al. Intel R RealSenseTM Stereoscopic Depth Cameras. CVPRW. 2017.
6)立体匹配算法原理与应用.奥比研究院.徐玉华
7)基于双目视觉的空间非合作目标姿态测量技术研究.颜坤
8)https://www.bilibili.com/video/BV1ka4y1L7xT?from=search&seid=5727123941116684431
9)https://blog.csdn.net/u011808673/article/details/90641589 10)https://www.cnblogs.com/polly333/p/5130375.html
 End
End
声明:部分内容来源于网络,仅供读者学术交流之目的。文章版权归原作者所有。如有不妥,请联系删除。