
一文了解点特征直方图
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

3D中特征检测和匹配的目标与2D中大致相同:从不同的角度查找可以与同一场景的扫描进行匹配。这些功能匹配可用于初始化oraidin注册。但是,3D数据的性质要求我们重新考虑什么指数比较适合用来计算。虽然没有具有相关强度的统一像素网格,但是却有了基本相同的非均匀数据点集合。
对于一个特定的点云,法线方向与该表面的曲率概率是基本的几何特征的描述。尽管计算简单,快速,但是在大多数情况下,点云将包含许多相似或相同的特征值,这使得无法获取更多信息和特征。我们着重介绍一些快速和高效的局部和全局3D点云特征检测算法。
表面法线估计
平面的法线向量是垂直于平面的单位向量,并且表面上某个点的法线向量定义为垂直于与表面相切的平面的向量。
检测点的法线向量的计算主要包括基于表面网格的求解方法和基于周围邻域中的点的分布的求解方法。
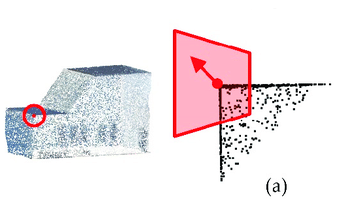
用于正常估计的不同区域选择
法线向量所在的轴是邻域分布的分散方向。假设距N个检测点的距离的半径位于r的附近,则相邻点与查询点p_i之间的协方差矩阵为:
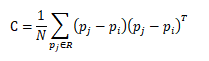
计算C的特征值和特征向量,并按降序{λ1,λ2,λ3}和相应的特征向量{e1,e2,e3}排列特征值。
其中,最大值λ1表示邻域点主要集中在相应的特征向量e1上,最小值λ3表示邻域点e3最分散在相应的特征向量上,因此特征向量e3表示法线向量。
点特征直方图
点特征直方图(PFH)通过使用围绕点的多维直方图的平均曲率来编码点的k个最近邻点的几何特性。这个高维空间提供了一些有用的特征表示,而对于6维可以保持不变,并且可以应付相邻的不同采样密度和噪声水平。
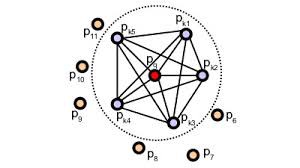
PFH的影响范围
半径为r的球的球心及其所有相邻点相互连接形成网络。最终的PFH几何特征将是通过计算邻域中所有对点之间的变化关系而获得的直方图。
为了计算给定两个点和,pi和pj以及它们相关的法线ns和nj两者之间的相对差,我们在特定点处定义了固定坐标系。
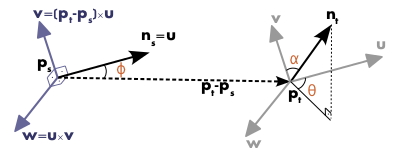
使用上面的uvw坐标系,可以将ns法线和ni法线之间的差分解为以下3个角度差。
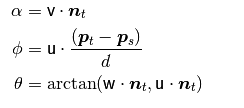
保存这些变量以及点之间的欧几里得距离,然后在计算所有对时将它们合并到直方图中。最终的描述符是每个变量的直方图的串联。
快点特征直方图
快点特征直方图(FPFH)是PFH的扩展,它具有PFH的这种几何特征,具有其大多数特征和相同的原理。
FPFH的输入也是具有正常信息的点云,输出是可以反映每个点周围邻域特征的直方图。但是与PFH不同,将采取一些简化和优化措施来加快FPFH的计算。
下面专门介绍FPFH如何通过简化和优化来加快计算速度。首先,对于每个点,使用类似于PFH的方法来计算三元组,并获得简化的点特征直方图,称为SPFH。使用加权的邻近SPFH来计算直方图的最终值,如下所示:

权重取决于给定距离度量空间上的中心点和相邻点。当然,这里也可以使用其他测量方法来设置该重量。
下载1:OpenCV-Contrib扩展模块中文版教程
在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。
下载2:Python视觉实战项目52讲
在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。
下载3:OpenCV实战项目20讲
在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~