
机器人也能打排球了,击球成功率80%!日本东京大学新型气动仿人机器人
大数据文摘授权转载自机器人大讲堂
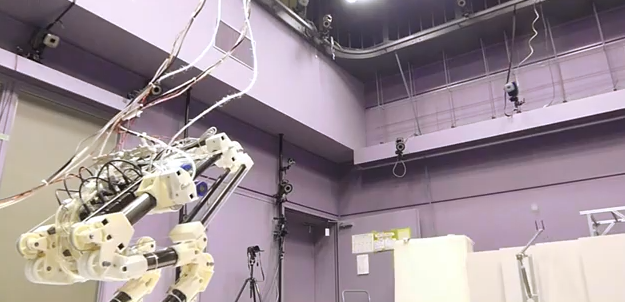
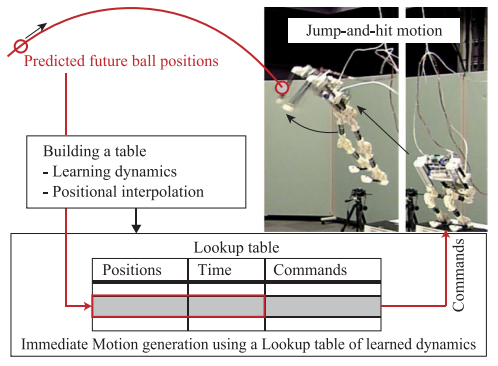
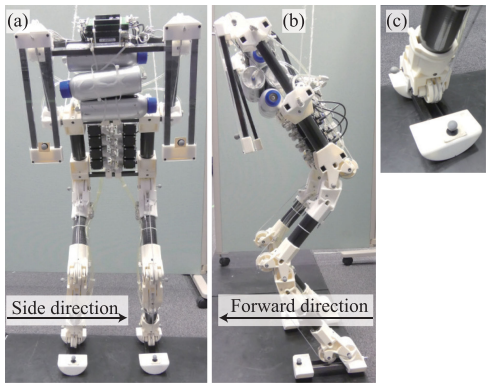
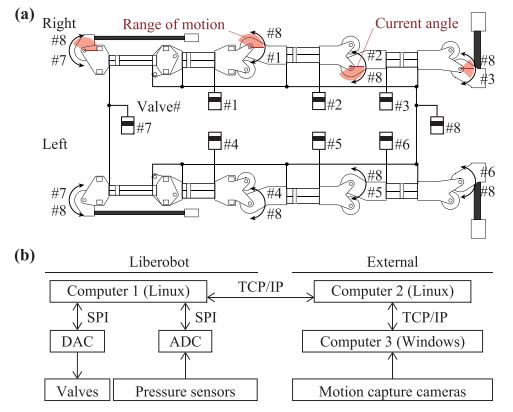
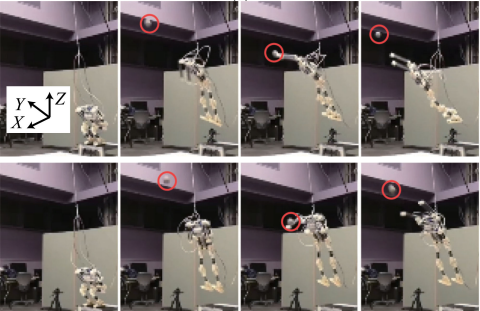
日本东京大学的研究人员近来研发了一款名为Liberobot的仿人机器人。Liberobot拥有八个关节,这八个关节采用结构集成的气动电缆气缸进行驱动。研究人员使用学习动力学查找表(IMoLo)进行即时运动生成,以生成气动仿人机器人的运动。利用该方法,机器人Liberobot可以瞬间向前跳跃并击中空中的飞球,这类似于人类排球运动员在排球运动中的表现。实验结果表明,使用IMoLo的气动仿人机器人可以在指定时间内即时执行动态全身运动,例如跳跃和击打运动,即使是针对运动中的目标,也可以实现有效击打。该仿人机器人是第一个能够执行此类动态运动的气动仿人机器人。相关研究成果在发表在SCI期刊IEEE Robotics and Automation Letters上。

评论