无人集群系统频频刷屏,扒一扒背后的动作捕捉系统
大数据文摘转载自机器人大讲堂
“ 我的眼睛就是尺 ”是短道速滑“王者”王濛的金句。而智能体在算法层面也有一把高精度的尺子,这把尺子就是“光学动作捕捉”。
提到 “多智能体协同控制技术”, 你的脑海里会呈现出怎样的画面,是出现在空中的多架无人机编队表演,还是公路上的多辆无人车列队行进,又或者是大海里多艘无人艇协同作战。
多智能体协同控制技术强调单体之间的合作与协同,往往能够大幅提高工作效率和能力,可以应用于许多场景,例如工业操作、巡逻侦察、灾情救援、环境勘探、智能物流、智能农业和消费娱乐等。
要实现多智能体协同控制,第一个要解决的问题就是知道每一个智能体(无人机、无人车、无人艇等)在什么位置,实际上就是定位问题,而 “动作捕捉” 是这一问题的重要技术支撑。
国外关于动作捕捉的研究一直热火朝天,在控制类学科领域有很多应用。而国内对动捕的研究起步较晚,但也有不少经典案例。
那么动作捕捉是否已经为广大机器人行业科研人员所关注?动作捕捉能够助力什么样的科研工作?依据的技术原理是什么?动作捕捉对机器人行业意味着什么?带来了哪些变化?
“动作捕捉”为机器人行业打开了一扇进击的大门
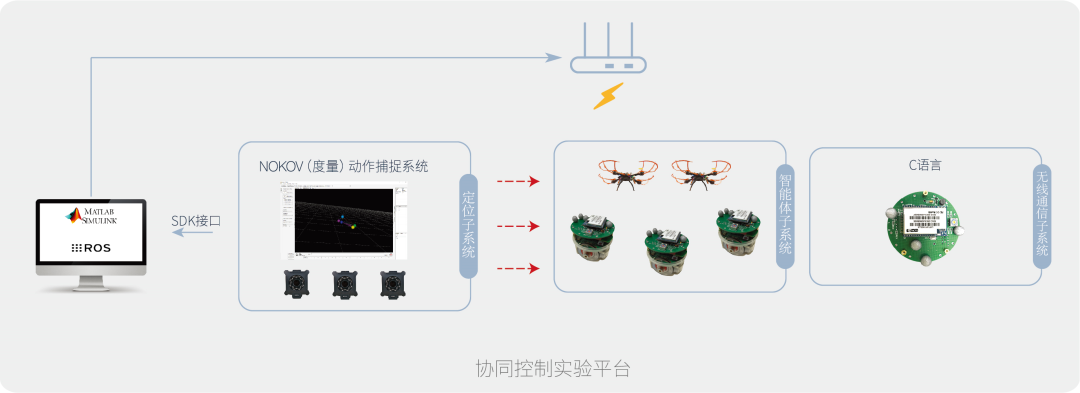
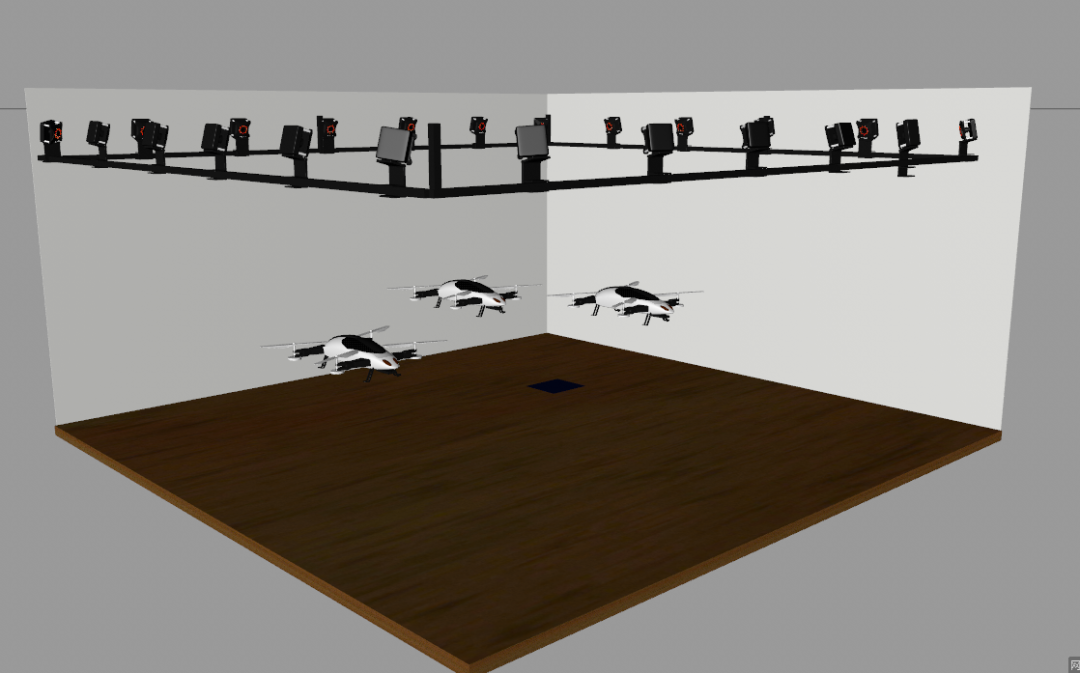
我们先以本文开篇北理工多智能体协同控制平台项目为例,深入了解动作捕捉的原理。
该协同控制平台主要由定位系统、通讯系统以及控制决策系统组成。 为了解决定位系统精度和实时性的问题,平台采用了NOKOV(度量)光学三维动作捕捉系统。
该动作捕捉系统延迟在两三个毫秒内,能够很好地满足实时定位并将位姿信息通过无线WiFi 通信传输给各个智能体,从而实现各个智能体的定位。
明确了智能体的位置之后,每个智能体身上的智能控制决策系统可以对多智能体的行动作出控制,从而实现整套系统的协同控制。
在这个系统中,组合定位系统是以外部NOKOV(度量)光学动作捕捉系统为主要定位校正方式,机载惯性器件辅助构成的多智能体组合定位系统。其中无人机位置定位可以采用外部光学动作捕捉系统+惯性导航+视觉导航的组合导航方式;无人车以光学定位数据为主,在光学定位系统数据丢失时,启用惯性器件的“备份”位姿信息,保持无人车继续运行。
如何让智能体实现更好的协同?我们看到动作捕捉方案是其中的关键要点。 动作捕捉(英文:Motion capture)是利用外部设备来对人或者其他物体的位移或者活动进行处理和记录的技术。
动作捕捉系统根据实现原理的不同,可以分成光学动作捕捉(简称“光学动捕”)、惯性动作捕捉、计算机视觉的动作捕捉方案。
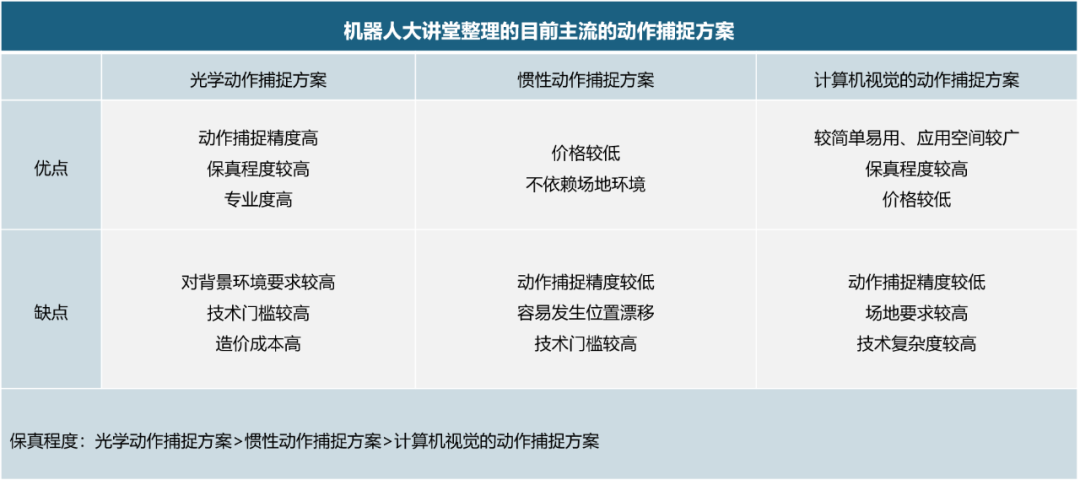
在前文北理工多智能体协同控制平台项目案例中,科研团队用到的是光学动作捕捉方案。 光学动作捕捉方案具有动作捕捉精度高、保真程度较高、专业度高等特点。 同时,该方案对环境要求高,技术复杂度高导致造价成本高,更适合科研或商业应用。
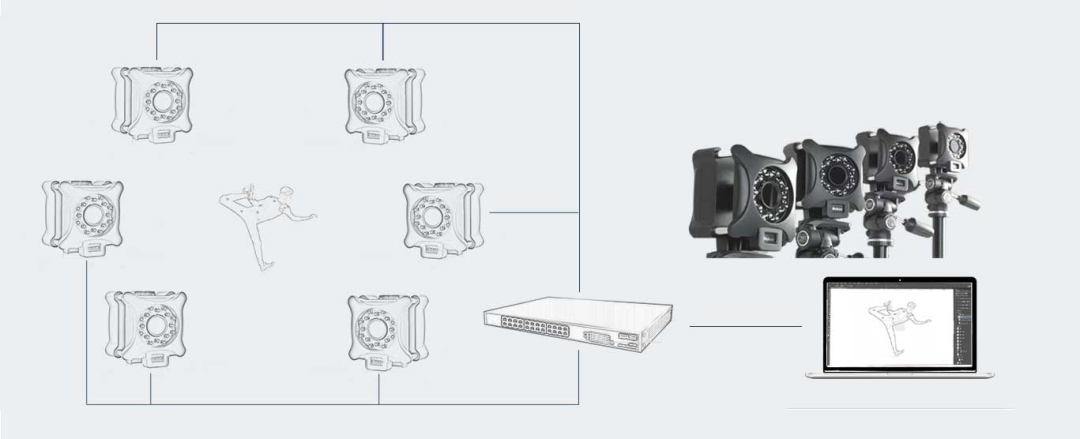
事实上,光学动作捕捉系统相当于智能体算法层面的一把“尺子”,它的工作原理是通过多个精密而复杂的光学摄像头从不同角度对标记点进行快速实时跟踪定位,来获取标记点的具体空间位置。上述北理工案例中采用的NOKOV(度量)动作捕捉系统可以获取目标物的位置、姿态以及速度、加速度等信息,实现多无人系统亚毫米级实时定位,适用于有高精度定位需求的研究。
具体来说,首先,光学动作捕捉镜头面板上的LED灯发出特定波长的红外光,照到被捕捉物,也就是反光标记点;然后,反光标记点表面的反光材料将红外光反射回镜头,反射回的红外光经过信号处理;最后,FPGA进行图像抓取和算法处理,从而获得反光标记点在镜头中的二维坐标。
两个镜头同时工作,就可以确定目标特征点在三维空间内的坐标; 大量坐标数据通过POE连接器传输给动作捕捉软件,便可以解算出目标在空间中的位置、方向和运动轨迹等信息,实现对目标的追踪。
这样的光学动捕系统在目前阶段对于机器人领域的某些研究和发展至关重要,适用于机器人领域的许多场景, 除了无人集群系统,还有外骨骼机器人、仿生机器人、机械臂、船舶和水下应用等。

在适用于机器人的应用中,与传统的遥控方式相比,光学动作捕捉系统可以实现更为直观、细致、复杂、灵活而快速的动作控制,提高机器人应付复杂情况的能力。 在当前机器人全自主控制尚未成熟的情况下,这一技术具有重要意义。
基于光学动作捕捉的数据驱动的智能体可以生成高度协同的动作,而且与物理模拟相结合时可以提供对物理干扰、环境变化和形态差异的自然过程响应。现在,越来越多的高校和科研机构选择采用光学动作捕捉系统做控制类的测试,以及室内定位解决方案。
目前,针对多智能体协同控制的研究有很多,包括智能体之间协同方式、通讯方式以及避障方法等,其中最主要的就是多智能体编队避障控制算法的研究。
由于NOKOV(度量)光学定位系统定位精度高于惯性导航器件几个数量级,一般在移动机器人能接收到的光学定位传输的数据时,使用光学定位系统进行定位并校正惯性传感器数据的累计误差,保持机器人自身存储数据与光学定位系统数据一致;在某一时间段遇到有遮挡无法得到定位系统传输的数据时,使用惯性传感器的存储数据进行定位,保证移动机器人能正常运行。
关于动作捕捉技术未来的趋势, 有专业人士分析,一方面是无标记点技术的发展,能够解决当前无标记点比有标记点更容易产生误差的问题。另一方面是软件算法持续升级,未来更智能化、修复和模拟能力更强的软件算法将成为动作捕捉技术商的核心竞争力之一。
打破技术壁垒,光学动捕满足多领域专业化需求
前面提到,光学动作捕捉系统很适合科研或商业应用。事实上,跟控制类相关的专业或学院或科技公司都适用。
美国是全球动作捕捉系统行业中发展最早、技术最先进、市场份额最大的国家;其次是欧洲地区,在世界上也同时占有较大的市场份额。中国是动作捕捉系统行业中发展规模较大、技术相对先进的新兴发展中国家之一。 特别是近年来,我国动作捕捉系统行业发展迅速,无论是技术研发还是实际应用都取得了长足的进步,市场知名度大大提高,应用领域不断扩大。
由于技术条件的限制,我们的光学动作捕捉系统产品主要模仿国外先进技术产品,在功能和性能上做了创新和突破,相比于欧美国家的光学动捕系统我国的动捕系统具有绝对的价格优势,我国的光学动捕系统产品在市场上的整体竞争力也在日益提升,与目前欧美、日本的技术差距正在不断缩小。
虽然国内动捕行业实现了弯道超车,不断推出行业爆品,但国内光学动捕公司有自主研发能力的(非进口品牌代理商)凤毛麟角,主要集中在北京、上海、深圳等一线城市。在国内市场,北京度量科技通过打破技术壁垒、完全自主研发,将光学动捕系统的市场价格打到了一个比较合适的价位。其研发的高精度、较高性价比动作捕捉产品也获得了国内市场较多的认可。客户可根据场地大小不同和精度要求不同,选择不同的数量和型号的镜头方案。
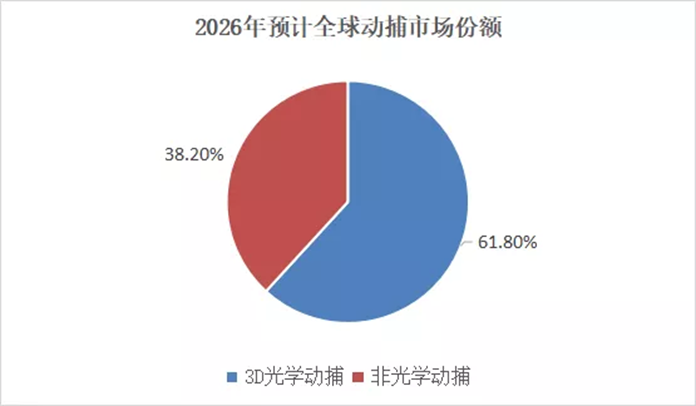
Verified Market Research咨询公司的调研报告显示,2026年动作捕捉市场规模将增长到20.6亿元,年复合增长率达到10.09%。
根据中国产业研究院发布的报告《2020-2026全球与中国3D动作捕捉市场现状及未来发展趋势》预测, 到达2026年时,全球3D光学动作捕捉市场规模将达到12亿元,约占总体市场规模的61.8%。