
Faster RCNN 官方源码解读
导读
本文详细的介绍了 torchvision 中的 FasterRCNN 代码实现,并分析了作者认为重要的知识点,GeneralizedRCNN的代码以及FasterRCNN的训练等。帮助入门的小伙伴更好的理解模型细节的问题。
目前 pytorch 已经在 torchvision 模块集成了 FasterRCNN 和 MaskRCNN 代码。考虑到帮助各位小伙伴理解模型细节问题,本文分析一下 FasterRCNN 代码,帮助新手理解 Two-Stage 检测中的主要问题。
这篇文章默认读者已经对 FasterRCNN 原理有一定了解。否则请先点击阅读上一篇文章:
torchvision 中 FasterRCNN 代码文档如下:
https://pytorch.org/docs/stable/torchvision/models.html#faster-r-cnnpytorch.org
在 python 中装好 torchvision 后,输入以下命令即可查看版本和代码位置:
import torchvision
print(torchvision.__version__)
# '0.6.0'
print(torchvision.__path__)
# ['/usr/local/lib/python3.7/site-packages/torchvision']代码结构
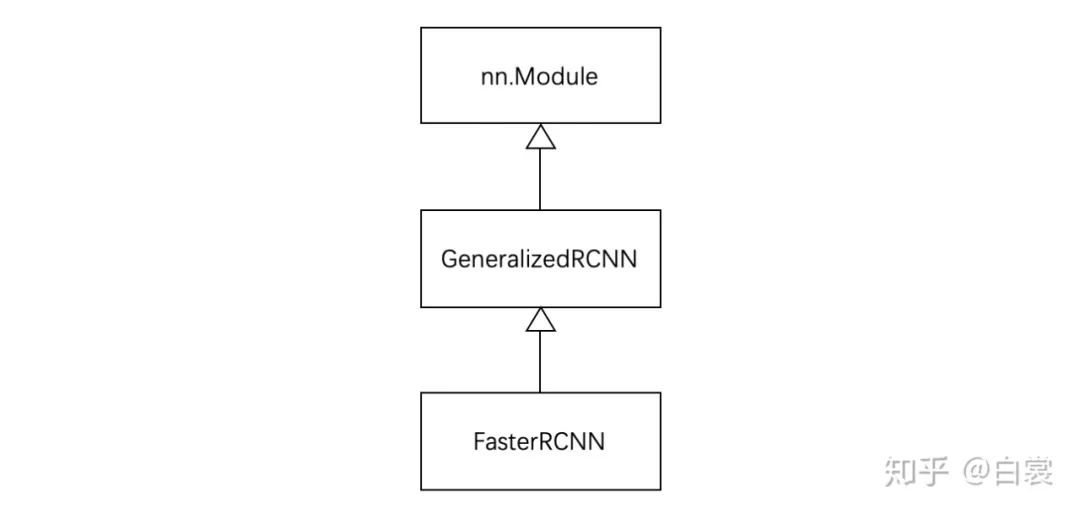
图1
作为 torchvision 中目标检测基类,GeneralizedRCNN 继承了 torch.nn.Module,后续 FasterRCNN 、MaskRCNN 都继承 GeneralizedRCNN。
GeneralizedRCNN
GeneralizedRCNN 继承基类 nn.Module 。首先来看看基类 GeneralizedRCNN 的代码:
class GeneralizedRCNN(nn.Module):
def __init__(self, backbone, rpn, roi_heads, transform):
super(GeneralizedRCNN, self).__init__()
self.transform = transform
self.backbone = backbone
self.rpn = rpn
self.roi_heads = roi_heads
# used only on torchscript mode
self._has_warned = False
@torch.jit.unused
def eager_outputs(self, losses, detections):
# type: (Dict[str, Tensor], List[Dict[str, Tensor]]) -> Tuple[Dict[str, Tensor], List[Dict[str, Tensor]]]
if self.training:
return losses
return detections
def forward(self, images, targets=None):
if self.training and targets is None:
raise ValueError("In training mode, targets should be passed")
original_image_sizes = torch.jit.annotate(List[Tuple[int, int]], [])
for img in images:
val = img.shape[-2:]
assert len(val) == 2
original_image_sizes.append((val[0], val[1]))
images, targets = self.transform(images, targets)
features = self.backbone(images.tensors)
if isinstance(features, torch.Tensor):
features = OrderedDict([('0', features)])
proposals, proposal_losses = self.rpn(images, features, targets)
detections, detector_losses = self.roi_heads(features, proposals, images.image_sizes, targets)
detections = self.transform.postprocess(detections, images.image_sizes, original_image_sizes)
losses = {}
losses.update(detector_losses)
losses.update(proposal_losses)
if torch.jit.is_scripting():
if not self._has_warned:
warnings.warn("RCNN always returns a (Losses, Detections) tuple in scripting")
self._has_warned = True
return (losses, detections)
else:
return self.eager_outputs(losses, detections)对于 GeneralizedRCNN 类,其中有4个重要的接口:
transform backbone rpn roi_heads
transform
# GeneralizedRCNN.forward(...)
for img in images:
val = img.shape[-2:]
assert len(val) == 2
original_image_sizes.append((val[0], val[1]))
images, targets = self.transform(images, targets)
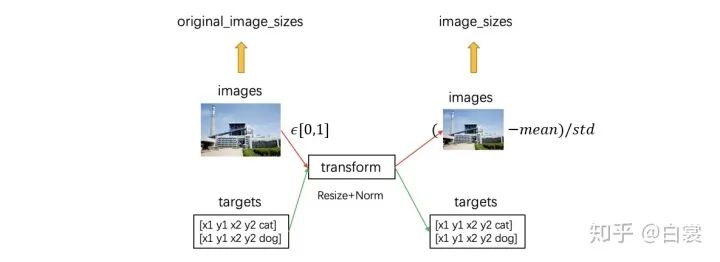
图2 transform接口
transform主要做2件事:
将输入进行标准化(如FasterRCNN是对 输入减 image_mean 再除 image_std) 将图像缩放到固定大小(同时也要对应缩放 targets 中标记框 )
需要说明,由于把缩放后的图像输入网络,那么网络输出的检测框也是在缩放后的图像上的。但是实际中我们需要的是在原始图像的检测框,为了对应起来,所以需要记录变换前original_images_sizes 。
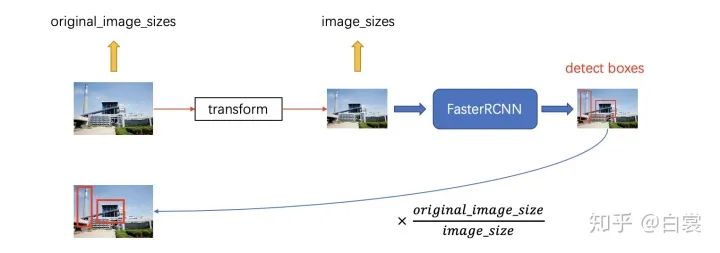
图3
这里解释一下为何要缩放图像。对于 FasterRCNN,从纯理论上来说确实可以支持任意大小的图片。但是实际中,如果输入图像太大(如6000x4000)会直接撑爆内存。考虑到工程问题,缩放是一个比较稳妥的折衷选择。
backbone + rpn + roi_heads
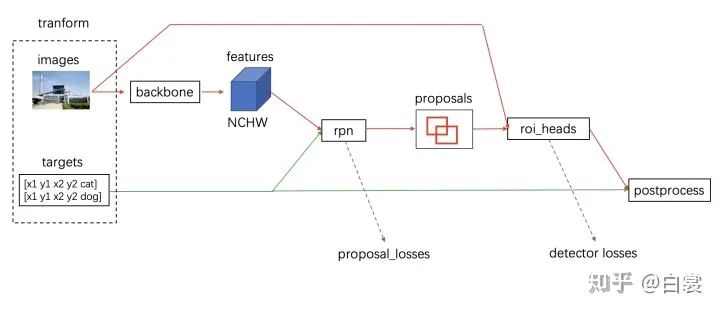
图4
完成图像缩放之后其实才算是正式进入网络流程。接下来有4个步骤:
将 transform 后的图像输入到 backbone 模块提取特征图
# GeneralizedRCNN.forward(...)
features = self.backbone(images.tensors)
backbone 一般为 VGG、ResNet、MobileNet 等网络。
然后经过 rpn 模块生成 proposals 和 proposal_losses
# GeneralizedRCNN.forward(...)
features = self.backbone(images.tensors)
接着进入 roi_heads 模块(即 roi_pooling + 分类)
# GeneralizedRCNN.forward(...)
detections, detector_losses =
self.roi_heads(features, proposals, images.image_sizes, targets
最后经 postprocess 模块(进行 NMS,同时将 box 通过 original_images_size映射回原图)
# GeneralizedRCNN.forward(...)
detections = self.transform.postprocess(detections, images.image_sizes, original_image_sizes)
FasterRCNN
FasterRCNN 继承基类 GeneralizedRCNN。
class FasterRCNN(GeneralizedRCNN):
def __init__(self, backbone, num_classes=None,
# transform parameters
min_size=800, max_size=1333,
image_mean=None, image_std=None,
# RPN parameters
rpn_anchor_generator=None, rpn_head=None,
rpn_pre_nms_top_n_train=2000, rpn_pre_nms_top_n_test=1000,
rpn_post_nms_top_n_train=2000, rpn_post_nms_top_n_test=1000,
rpn_nms_thresh=0.7,
rpn_fg_iou_thresh=0.7, rpn_bg_iou_thresh=0.3,
rpn_batch_size_per_image=256, rpn_positive_fraction=0.5,
# Box parameters
box_roi_pool=None, box_head=None, box_predictor=None,
box_score_thresh=0.05, box_nms_thresh=0.5, box_detections_per_img=100,
box_fg_iou_thresh=0.5, box_bg_iou_thresh=0.5,
box_batch_size_per_image=512, box_positive_fraction=0.25,
bbox_reg_weights=None):
out_channels = backbone.out_channels
if rpn_anchor_generator is None:
anchor_sizes = ((32,), (64,), (128,), (256,), (512,))
aspect_ratios = ((0.5, 1.0, 2.0),) * len(anchor_sizes)
rpn_anchor_generator = AnchorGenerator(
anchor_sizes, aspect_ratios
)
if rpn_head is None:
rpn_head = RPNHead(
out_channels, rpn_anchor_generator.num_anchors_per_location()[0]
)
rpn_pre_nms_top_n = dict(training=rpn_pre_nms_top_n_train, testing=rpn_pre_nms_top_n_test)
rpn_post_nms_top_n = dict(training=rpn_post_nms_top_n_train, testing=rpn_post_nms_top_n_test)
rpn = RegionProposalNetwork(
rpn_anchor_generator, rpn_head,
rpn_fg_iou_thresh, rpn_bg_iou_thresh,
rpn_batch_size_per_image, rpn_positive_fraction,
rpn_pre_nms_top_n, rpn_post_nms_top_n, rpn_nms_thresh)
if box_roi_pool is None:
box_roi_pool = MultiScaleRoIAlign(
featmap_names=['0', '1', '2', '3'],
output_size=7,
sampling_ratio=2)
if box_head is None:
resolution = box_roi_pool.output_size[0]
representation_size = 1024
box_head = TwoMLPHead(
out_channels * resolution ** 2,
representation_size)
if box_predictor is None:
representation_size = 1024
box_predictor = FastRCNNPredictor(
representation_size,
num_classes)
roi_heads = RoIHeads(
# Box
box_roi_pool, box_head, box_predictor,
box_fg_iou_thresh, box_bg_iou_thresh,
box_batch_size_per_image, box_positive_fraction,
bbox_reg_weights,
box_score_thresh, box_nms_thresh, box_detections_per_img)
if image_mean is None:
image_mean = [0.485, 0.456, 0.406]
if image_std is None:
image_std = [0.229, 0.224, 0.225]
transform = GeneralizedRCNNTransform(min_size, max_size, image_mean, image_std)
super(FasterRCNN, self).__init__(backbone, rpn, roi_heads, transform)FasterRCNN 实现了 GeneralizedRCNN 中的 transform、backbone、rpn、roi_heads 接口:
# FasterRCNN.__init__(...)
super(FasterRCNN, self).__init__(backbone, rpn, roi_heads, transform)
对于 transform 接口,使用 GeneralizedRCNNTransform 实现。从代码变量名可以明显看到包含:
与缩放相关参数:min_size + max_size 与归一化相关参数:image_mean + image_std(对输入[0, 1]减去image_mean再除以image_std)
# FasterRCNN.__init__(...)
if image_mean is None:
image_mean = [0.485, 0.456, 0.406]
if image_std is None:
image_std = [0.229, 0.224, 0.225]
transform = GeneralizedRCNNTransform(min_size, max_size, image_mean, image_std)对于 backbone 使用 ResNet50 + FPN 结构:
def fasterrcnn_resnet50_fpn(pretrained=False, progress=True, num_classes=91, pretrained_backbone=True, **kwargs):
if pretrained:
# no need to download the backbone if pretrained is set
pretrained_backbone = False
backbone = resnet_fpn_backbone('resnet50', pretrained_backbone)
model = FasterRCNN(backbone, num_classes, **kwargs)
if pretrained:
state_dict = load_state_dict_from_url(model_urls['fasterrcnn_resnet50_fpn_coco'], progress=progress)
model.load_state_dict(state_dict)
return modelResNet: Deep Residual Learning for Image Recognition
FPN: Feature Pyramid Networks for Object Detection
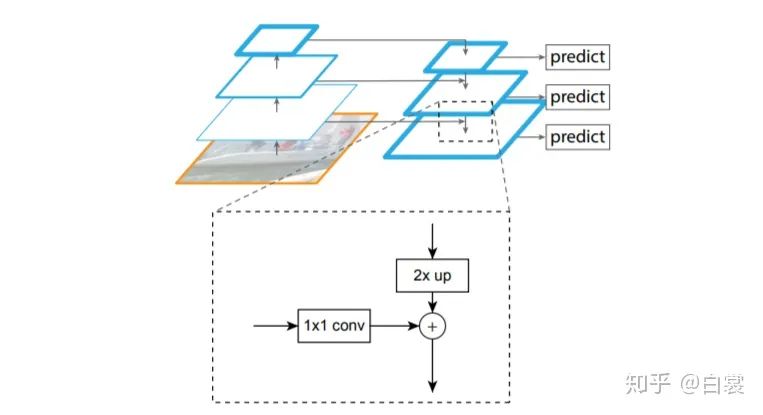
图5 FPN
接下来重点介绍 rpn 接口的实现。首先是 rpn_anchor_generator :
# FasterRCNN.__init__(...)
if rpn_anchor_generator is None:
anchor_sizes = ((32,), (64,), (128,), (256,), (512,))
aspect_ratios = ((0.5, 1.0, 2.0),) * len(anchor_sizes)
rpn_anchor_generator = AnchorGenerator(
anchor_sizes, aspect_ratios
)
对于普通的 FasterRCNN 只需要将 feature_map 输入到 rpn 网络生成 proposals 即可。但是由于加入 FPN,需要将多个 feature_map 逐个输入到 rpn 网络。
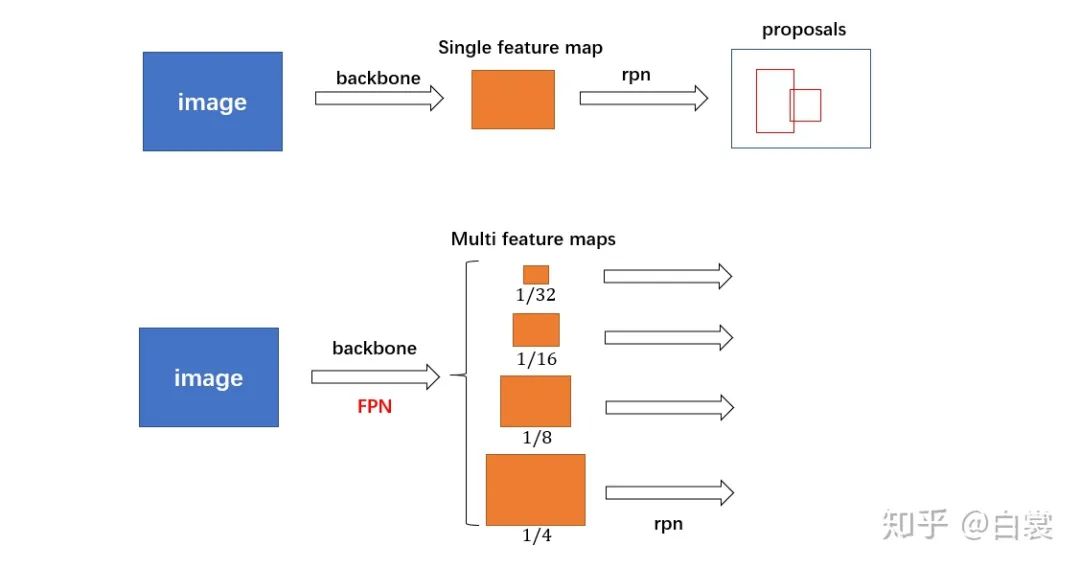
图6
接下来看看 AnchorGenerator 具体实现:
class AnchorGenerator(nn.Module):
......
def generate_anchors(self, scales, aspect_ratios, dtype=torch.float32, device="cpu"):
# type: (List[int], List[float], int, Device) # noqa: F821
scales = torch.as_tensor(scales, dtype=dtype, device=device)
aspect_ratios = torch.as_tensor(aspect_ratios, dtype=dtype, device=device)
h_ratios = torch.sqrt(aspect_ratios)
w_ratios = 1 / h_ratios
ws = (w_ratios[:, None] * scales[None, :]).view(-1)
hs = (h_ratios[:, None] * scales[None, :]).view(-1)
base_anchors = torch.stack([-ws, -hs, ws, hs], dim=1) / 2
return base_anchors.round()
def set_cell_anchors(self, dtype, device):
# type: (int, Device) -> None # noqa: F821
......
cell_anchors = [
self.generate_anchors(
sizes,
aspect_ratios,
dtype,
device
)
for sizes, aspect_ratios in zip(self.sizes, self.aspect_ratios)
]
self.cell_anchors = cell_anchors
首先,每个位置有 5 种 anchor_size 和 3 种 aspect_ratios,所以每个位置生成 15 个 base_anchors:
[ -23., -11., 23., 11.]
[ -16., -16., 16., 16.] # w = h = 32, ratio = 1
[ -11., -23., 11., 23.]
[ -45., -23., 45., 23.]
[ -32., -32., 32., 32.] # w = h = 64, ratio = 1
[ -23., -45., 23., 45.]
[ -91., -45., 91., 45.]
[ -64., -64., 64., 64.] # w = h = 128, ratio = 1
[ -45., -91., 45., 91.]
[-181., -91., 181., 91.]
[-128., -128., 128., 128.] # w = h = 256, ratio = 1
[ -91., -181., 91., 181.]
[-362., -181., 362., 181.]
[-256., -256., 256., 256.] # w = h = 512, ratio = 1
[-181., -362., 181., 362.]
注意 base_anchors 的中心都是 点,如下图所示:
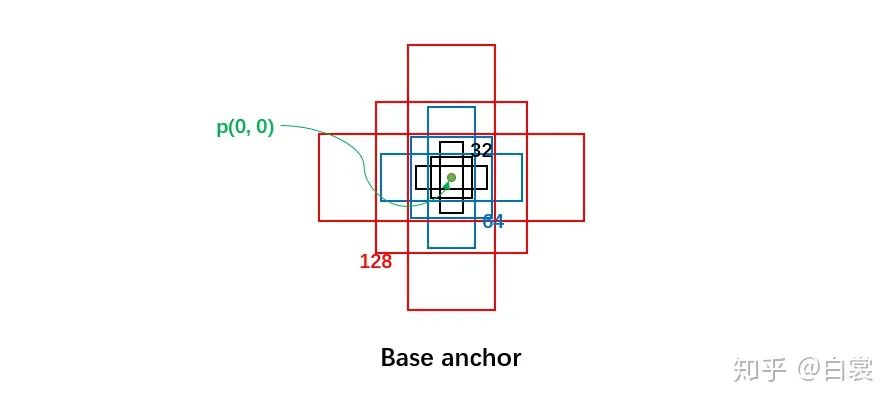
图7 base_anchor(此图只画了32/64/128的base_anchor)
接着来看 AnchorGenerator.grid_anchors 函数:
# AnchorGenerator
def grid_anchors(self, grid_sizes, strides):
# type: (List[List[int]], List[List[Tensor]])
anchors = []
cell_anchors = self.cell_anchors
assert cell_anchors is not None
for size, stride, base_anchors in zip(
grid_sizes, strides, cell_anchors
):
grid_height, grid_width = size
stride_height, stride_width = stride
device = base_anchors.device
# For output anchor, compute [x_center, y_center, x_center, y_center]
shifts_x = torch.arange(
0, grid_width, dtype=torch.float32, device=device
) * stride_width
shifts_y = torch.arange(
0, grid_height, dtype=torch.float32, device=device
) * stride_height
shift_y, shift_x = torch.meshgrid(shifts_y, shifts_x)
shift_x = shift_x.reshape(-1)
shift_y = shift_y.reshape(-1)
shifts = torch.stack((shift_x, shift_y, shift_x, shift_y), dim=1)
# For every (base anchor, output anchor) pair,
# offset each zero-centered base anchor by the center of the output anchor.
anchors.append(
(shifts.view(-1, 1, 4) + base_anchors.view(1, -1, 4)).reshape(-1, 4)
)
return anchors
def forward(self, image_list, feature_maps):
# type: (ImageList, List[Tensor])
grid_sizes = list([feature_map.shape[-2:] for feature_map in feature_maps])
image_size = image_list.tensors.shape[-2:]
dtype, device = feature_maps[0].dtype, feature_maps[0].device
strides = [[torch.tensor(image_size[0] / g[0], dtype=torch.int64, device=device),
torch.tensor(image_size[1] / g[1], dtype=torch.int64, device=device)] for g in grid_sizes]
self.set_cell_anchors(dtype, device)
anchors_over_all_feature_maps = self.cached_grid_anchors(grid_sizes, strides)
......
在之前提到,由于有 FPN 网络,所以输入 rpn 的是多个特征。为了方便介绍,以下都是以某一个特征进行描述,其他特征类似。
假设有 的特征,首先会计算这个特征相对于输入图像的下采样倍数 stride:

然后生成一个 大小的网格,每个格子长度为 stride,如下图:
# AnchorGenerator.grid_anchors(...)
shifts_x = torch.arange(0, grid_width, dtype=torch.float32, device=device) * stride_width
shifts_y = torch.arange(0, grid_height, dtype=torch.float32, device=device) * stride_height
shift_y, shift_x = torch.meshgrid(shifts_y, shifts_x)
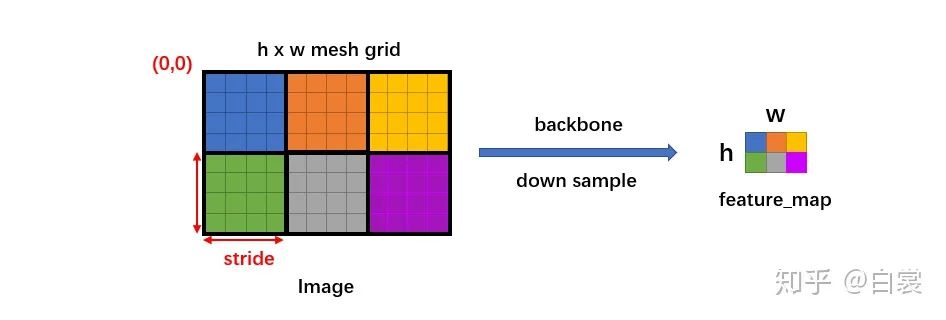
图8
然后将 base_anchors 的中心从 移动到网格的点,且在网格的每个点都放置一组 base_anchors。这样就在当前 feature_map 上有了很多的 anchors。
需要特别说明,stride 代表网络的感受野,网络不可能检测到比 feature_map 更密集的框了!所以才只会在网格中每个点设置 anchors(反过来说,如果在网格的两个点之间设置 anchors,那么就对应 feature_map 中半个点,显然不合理)。
# AnchorGenerator.grid_anchors(...)
anchors.append((shifts.view(-1, 1, 4) + base_anchors.view(1, -1, 4)).reshape(-1, 4))
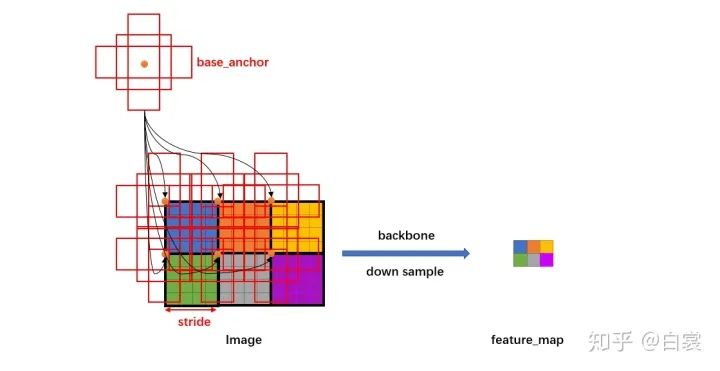
图9 (注:为了方便描述,这里只画了3个anchor,实际每个点有9个anchor)
放置好 anchors 后,接下来就要调整网络,使网络输出能够判断每个 anchor 是否有目标,同时还要有 bounding box regression 需要的4个值 。
class RPNHead(nn.Module):
def __init__(self, in_channels, num_anchors):
super(RPNHead, self).__init__()
self.conv = nn.Conv2d(
in_channels, in_channels, kernel_size=3, stride=1, padding=1
)
self.cls_logits = nn.Conv2d(in_channels, num_anchors, kernel_size=1, stride=1)
self.bbox_pred = nn.Conv2d(
in_channels, num_anchors * 4, kernel_size=1, stride=1
)
def forward(self, x):
logits = []
bbox_reg = []
for feature in x:
t = F.relu(self.conv(feature))
logits.append(self.cls_logits(t))
bbox_reg.append(self.bbox_pred(t))
return logits, bbox_reg
假设 feature 的大小 ,每个点 个 anchor。从 RPNHead 的代码中可以明显看到:
首先进行 3x3 卷积 然后对 feature 进行卷积,输出 cls_logits 大小是 ,对应每个 anchor 是否有目标; 同时feature 进行卷积,输出 bbox_pred 大小是 ,对应每个点的4个框位置回归信息 。
# RPNHead.__init__(...)
self.cls_logits = nn.Conv2d(in_channels, num_anchors, kernel_size=1, stride=1)
self.bbox_pred = nn.Conv2d(in_channels, num_anchors * 4, kernel_size=1, stride=1)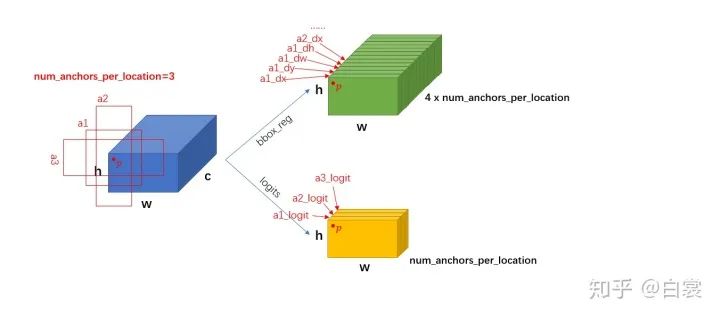
图10(注:为了方便描述,这里只画了3个anchor,实际每个点有9个anchor)
上述过程只是单个 feature_map 的处理流程。对于 FPN 网络的输出的多个大小不同的 feature_maps,每个特征图都会按照上述过程计算 stride 和网格,并设置 anchors。当处理完后获得密密麻麻的各种 anchors 了。
接下来进入 RegionProposalNetwork 类:
# FasterRCNN.__init__(...)
rpn_pre_nms_top_n = dict(training=rpn_pre_nms_top_n_train, testing=rpn_pre_nms_top_n_test)
rpn_post_nms_top_n = dict(training=rpn_post_nms_top_n_train, testing=rpn_post_nms_top_n_test)
# rpn_anchor_generator 生成anchors
# rpn_head 调整feature_map获得cls_logits+bbox_pred
rpn = RegionProposalNetwork(
rpn_anchor_generator, rpn_head,
rpn_fg_iou_thresh, rpn_bg_iou_thresh,
rpn_batch_size_per_image, rpn_positive_fraction,
rpn_pre_nms_top_n, rpn_post_nms_top_n, rpn_nms_thresh)RegionProposalNetwork 类的用是:
test 阶段 :计算有目标的 anchor 并进行框回归生成 proposals,然后 NMS train 阶段 :除了上面的作用,还计算 rpn loss
class RegionProposalNetwork(torch.nn.Module):
.......
def forward(self, images, features, targets=None):
features = list(features.values())
objectness, pred_bbox_deltas = self.head(features)
anchors = self.anchor_generator(images, features)
num_images = len(anchors)
num_anchors_per_level_shape_tensors = [o[0].shape for o in objectness]
num_anchors_per_level = [s[0] * s[1] * s[2] for s in num_anchors_per_level_shape_tensors]
objectness, pred_bbox_deltas = \
concat_box_prediction_layers(objectness, pred_bbox_deltas)
# apply pred_bbox_deltas to anchors to obtain the decoded proposals
# note that we detach the deltas because Faster R-CNN do not backprop through
# the proposals
proposals = self.box_coder.decode(pred_bbox_deltas.detach(), anchors)
proposals = proposals.view(num_images, -1, 4)
boxes, scores = self.filter_proposals(proposals, objectness, images.image_sizes, num_anchors_per_level)
losses = {}
if self.training:
assert targets is not None
labels, matched_gt_boxes = self.assign_targets_to_anchors(anchors, targets)
regression_targets = self.box_coder.encode(matched_gt_boxes, anchors)
loss_objectness, loss_rpn_box_reg = self.compute_loss(
objectness, pred_bbox_deltas, labels, regression_targets)
losses = {
"loss_objectness": loss_objectness,
"loss_rpn_box_reg": loss_rpn_box_reg,
}
return boxes, losses
具体来看,首先计算有目标的 anchor 并进行框回归生成 proposals :
# RegionProposalNetwork.forward(...)
objectness, pred_bbox_deltas = self.head(features)
anchors = self.anchor_generator(images, features)
......
proposals = self.box_coder.decode(pred_bbox_deltas.detach(), anchors)
proposals = proposals.view(num_images, -1, 4)
然后依照 objectness 置信由大到小度排序(优先提取更可能包含目标的的),并 NMS,生成 boxes (即 NMS 后的 proposal boxes ) :
# RegionProposalNetwork.forward(...)
boxes, scores = self.filter_proposals(proposals, objectness, images.image_sizes, num_anchors_per_level)
如果是训练阶段,还要将 boxes 与 anchors 进行匹配,计算 cls_logits 的损失 loss_objectness,同时计算 bbox_pred 的损失 loss_rpn_box_reg。
在 RegionProposalNetwork 之后已经生成了 boxes ,接下来就要提取 boxes 内的特征进行 roi_pooling :
roi_heads = RoIHeads(
# Box
box_roi_pool, box_head, box_predictor,
box_fg_iou_thresh, box_bg_iou_thresh,
box_batch_size_per_image, box_positive_fraction,
bbox_reg_weights,
box_score_thresh, box_nms_thresh, box_detections_per_img)
这里一点问题是如何计算 box 所属的 feature_map:
对于原始 FasterRCNN,只在 backbone 的最后一层 feature_map 提取 box 对应特征; 当加入 FPN 后 backbone 会输出多个特征图,需要计算当前 boxes 对应于哪一个特征。
如下图:
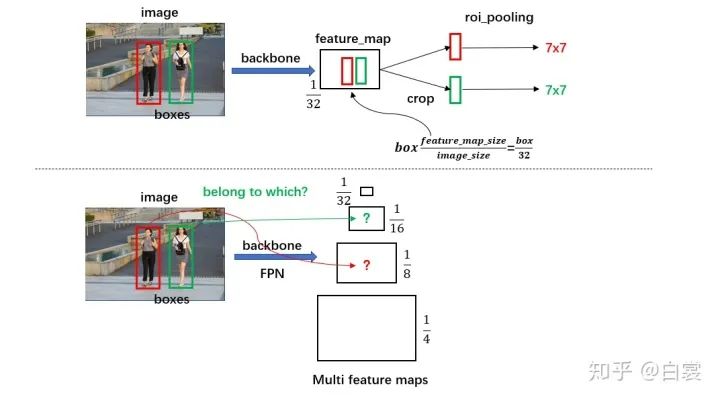
图11
class MultiScaleRoIAlign(nn.Module):
......
def infer_scale(self, feature, original_size):
# type: (Tensor, List[int])
# assumption: the scale is of the form 2 ** (-k), with k integer
size = feature.shape[-2:]
possible_scales = torch.jit.annotate(List[float], [])
for s1, s2 in zip(size, original_size):
approx_scale = float(s1) / float(s2)
scale = 2 ** float(torch.tensor(approx_scale).log2().round())
possible_scales.append(scale)
assert possible_scales[0] == possible_scales[1]
return possible_scales[0]
def setup_scales(self, features, image_shapes):
# type: (List[Tensor], List[Tuple[int, int]])
assert len(image_shapes) != 0
max_x = 0
max_y = 0
for shape in image_shapes:
max_x = max(shape[0], max_x)
max_y = max(shape[1], max_y)
original_input_shape = (max_x, max_y)
scales = [self.infer_scale(feat, original_input_shape) for feat in features]
# get the levels in the feature map by leveraging the fact that the network always
# downsamples by a factor of 2 at each level.
lvl_min = -torch.log2(torch.tensor(scales[0], dtype=torch.float32)).item()
lvl_max = -torch.log2(torch.tensor(scales[-1], dtype=torch.float32)).item()
self.scales = scales
self.map_levels = initLevelMapper(int(lvl_min), int(lvl_max))
首先计算每个 feature_map 相对于网络输入 image 的下采样倍率 scale。其中 infer_scale 函数采用如下的近似公式:

该公式相当于做了一个简单的映射,将不同的 feature_map 与 image 大小比映射到附近的尺度:
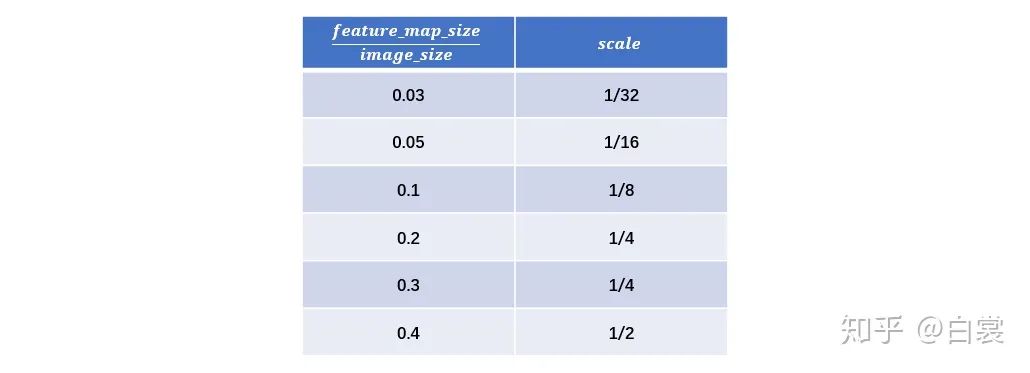
图12
例如对于 FasterRCNN 实际值为:

之后设置 lvl_min=2 和 lvl_max=5:
# MultiScaleRoIAlign.setup_scales(...)
# get the levels in the feature map by leveraging the fact that the network always
# downsamples by a factor of 2 at each level.
lvl_min = -torch.log2(torch.tensor(scales[0], dtype=torch.float32)).item()
lvl_max = -torch.log2(torch.tensor(scales[-1], dtype=torch.float32)).item()
接着使用 FPN 原文中的公式计算 box 所在 anchor(其中 , 为 box 面积):

class LevelMapper(object)
def __init__(self, k_min, k_max, canonical_scale=224, canonical_level=4, eps=1e-6):
self.k_min = k_min # lvl_min=2
self.k_max = k_max # lvl_max=5
self.s0 = canonical_scale # 224
self.lvl0 = canonical_level # 4
self.eps = eps
def __call__(self, boxlists):
s = torch.sqrt(torch.cat([box_area(boxlist) for boxlist in boxlists]))
# Eqn.(1) in FPN paper
target_lvls = torch.floor(self.lvl0 + torch.log2(s / self.s0) + torch.tensor(self.eps, dtype=s.dtype))
target_lvls = torch.clamp(target_lvls, min=self.k_min, max=self.k_max)
return (target_lvls.to(torch.int64) - self.k_min).to(torch.int64)
其中 torch.clamp(input, min, max) → Tensor 函数的作用是截断,防止越界:

可以看到,通过 LevelMapper 类将不同大小的 box 定位到某个 feature_map,如下图。之后就是按照图11中的流程进行 roi_pooling 操作。
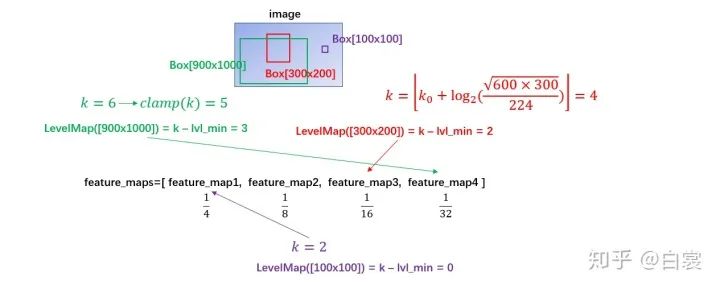
图13
在确定 proposal box 所属 FPN 中哪个 feature_map 之后,接着来看 MultiScaleRoIAlign 如何进行 roi_pooling 操作:
class MultiScaleRoIAlign(nn.Module):
......
def forward(self, x, boxes, image_shapes):
# type: (Dict[str, Tensor], List[Tensor], List[Tuple[int, int]]) -> Tensor
x_filtered = []
for k, v in x.items():
if k in self.featmap_names:
x_filtered.append(v)
num_levels = len(x_filtered)
rois = self.convert_to_roi_format(boxes)
if self.scales is None:
self.setup_scales(x_filtered, image_shapes)
scales = self.scales
assert scales is not None
# 没有 FPN 时,只有1/32的最后一个feature_map进行roi_pooling
if num_levels == 1:
return roi_align(
x_filtered[0], rois,
output_size=self.output_size,
spatial_scale=scales[0],
sampling_ratio=self.sampling_ratio
)
# 有 FPN 时,有4个feature_map进行roi_pooling
# 首先按照
mapper = self.map_levels
assert mapper is not None
levels = mapper(boxes)
num_rois = len(rois)
num_channels = x_filtered[0].shape[1]
dtype, device = x_filtered[0].dtype, x_filtered[0].device
result = torch.zeros(
(num_rois, num_channels,) + self.output_size,
dtype=dtype,
device=device,
)
tracing_results = []
for level, (per_level_feature, scale) in enumerate(zip(x_filtered, scales)):
idx_in_level = torch.nonzero(levels == level).squeeze(1)
rois_per_level = rois[idx_in_level]
result_idx_in_level = roi_align(
per_level_feature, rois_per_level,
output_size=self.output_size,
spatial_scale=scale, sampling_ratio=self.sampling_ratio)
if torchvision._is_tracing():
tracing_results.append(result_idx_in_level.to(dtype))
else:
result[idx_in_level] = result_idx_in_level
if torchvision._is_tracing():
result = _onnx_merge_levels(levels, tracing_results)
return result
在 MultiScaleRoIAlign.forward(...) 函数可以看到:
没有 FPN 时,只有1/32的最后一个 feature_map 进行 roi_pooling
if num_levels == 1:
return roi_align(
x_filtered[0], rois,
output_size=self.output_size,
spatial_scale=scales[0],
sampling_ratio=self.sampling_ratio
)
有 FPN 时,有4个 的 feature maps 参加计算。首先计算每个每个 box 所属哪个 feature map ,再在所属 feature map 进行 roi_pooling
# 首先计算每个每个 box 所属哪个 feature map
levels = mapper(boxes)
......
# 再在所属 feature map 进行 roi_pooling
# 即 idx_in_level = torch.nonzero(levels == level).squeeze(1)
for level, (per_level_feature, scale) in enumerate(zip(x_filtered, scales)):
idx_in_level = torch.nonzero(levels == level).squeeze(1)
rois_per_level = rois[idx_in_level]
result_idx_in_level = roi_align(
per_level_feature, rois_per_level,
output_size=self.output_size,
spatial_scale=scale, sampling_ratio=self.sampling_ratio)
之后就获得了所谓的 7x7 特征(在 FasterRCNN.__init__(...) 中设置了 output_size=7)。需要说明,原始 FasterRCNN 应该是使用 roi_pooling,但是这里使用 roi_align 代替以提升检测器性能。
对于 torchvision.ops.roi_align 函数输入的参数,分别为:
per_level_feature 代表 FPN 输出的某一 feature_map rois_per_level 为该特征 feature_map 对应的所有 proposal boxes(之前计算 level得到) output_size=7 代表输出为 7x7 spatial_scale 代表特征 feature_map 相对输入 image 的下采样尺度(如 1/4,1/8,...) sampling_ratio 为 roi_align 采样率,有兴趣的读者请自行查阅 MaskRCNN 文章
接下来就是将特征转为最后针对 box 的类别信息(如人、猫、狗、车)和进一步的框回归信息。
class TwoMLPHead(nn.Module):
def __init__(self, in_channels, representation_size):
super(TwoMLPHead, self).__init__()
self.fc6 = nn.Linear(in_channels, representation_size)
self.fc7 = nn.Linear(representation_size, representation_size)
def forward(self, x):
x = x.flatten(start_dim=1)
x = F.relu(self.fc6(x))
x = F.relu(self.fc7(x))
return x
class FastRCNNPredictor(nn.Module):
def __init__(self, in_channels, num_classes):
super(FastRCNNPredictor, self).__init__()
self.cls_score = nn.Linear(in_channels, num_classes)
self.bbox_pred = nn.Linear(in_channels, num_classes * 4)
def forward(self, x):
if x.dim() == 4:
assert list(x.shape[2:]) == [1, 1]
x = x.flatten(start_dim=1)
scores = self.cls_score(x)
bbox_deltas = self.bbox_pred(x)
return scores, bbox_deltas
首先 TwoMLPHead 将 7x7 特征经过两个全连接层转为 1024,然后 FastRCNNPredictor 将每个 box 对应的 1024 维特征转为 cls_score 和 bbox_pred :
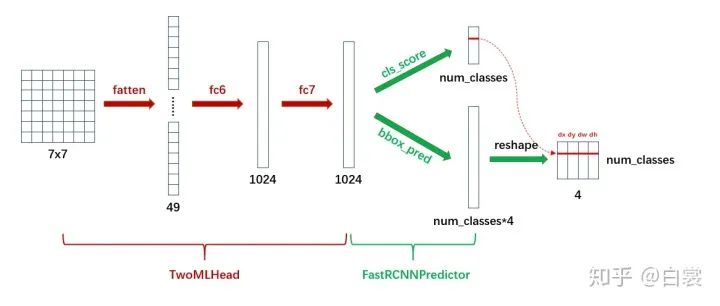
图14
显然 cls_score 后接 softmax 即为类别概率,可以确定 box 的类别;在确定类别后,在 bbox_pred 中对应类别的 4个值即为第二次 bounding box regression 需要的4个偏移值。
简单的说,带有FPN的FasterRCNN网络结构可以用下图表示:
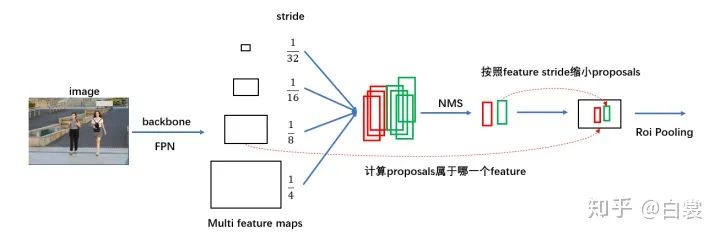
图15
关于训练
FasterRCNN模型在两处地方有损失函数:
在 RegionProposalNetwork 类,需要判别 anchor 中是否包含目标从而生成 proposals,这里需要计算 loss 在 RoIHeads 类,对 roi_pooling 后的全连接生成的 cls_score 和 bbox_pred 进行训练,也需要计算 loss
首先来看 RegionProposalNetwork 类中的 assign_targets_to_anchors 函数。
def assign_targets_to_anchors(self, anchors, targets):
# type: (List[Tensor], List[Dict[str, Tensor]])
labels = []
matched_gt_boxes = []
for anchors_per_image, targets_per_image in zip(anchors, targets):
gt_boxes = targets_per_image["boxes"]
if gt_boxes.numel() == 0:
# Background image (negative example)
device = anchors_per_image.device
matched_gt_boxes_per_image = torch.zeros(anchors_per_image.shape, dtype=torch.float32, device=device)
labels_per_image = torch.zeros((anchors_per_image.shape[0],), dtype=torch.float32, device=device)
else:
match_quality_matrix = box_ops.box_iou(gt_boxes, anchors_per_image)
matched_idxs = self.proposal_matcher(match_quality_matrix)
# get the targets corresponding GT for each proposal
# NB: need to clamp the indices because we can have a single
# GT in the image, and matched_idxs can be -2, which goes
# out of bounds
matched_gt_boxes_per_image = gt_boxes[matched_idxs.clamp(min=0)]
labels_per_image = matched_idxs >= 0
labels_per_image = labels_per_image.to(dtype=torch.float32)
# Background (negative examples)
bg_indices = matched_idxs == self.proposal_matcher.BELOW_LOW_THRESHOLD
labels_per_image[bg_indices] = torch.tensor(0.0)
# discard indices that are between thresholds
inds_to_discard = matched_idxs == self.proposal_matcher.BETWEEN_THRESHOLDS
labels_per_image[inds_to_discard] = torch.tensor(-1.0)
labels.append(labels_per_image)
matched_gt_boxes.append(matched_gt_boxes_per_image)
return labels, matched_gt_boxes
当图像中没有 gt_boxes 时,设置所有 anchor 都为 background(即 label 为 0):
if gt_boxes.numel() == 0
# Background image (negative example)
device = anchors_per_image.device
matched_gt_boxes_per_image = torch.zeros(anchors_per_image.shape, dtype=torch.float32, device=device)
labels_per_image = torch.zeros((anchors_per_image.shape[0],), dtype=torch.float32, device=device)
当图像中有 gt_boxes 时,计算 anchor 与 gt_box 的 IOU:
选择 IOU < 0.3 的 anchor 为 background,标签为 0
labels_per_image[bg_indices] = torch.tensor(0.0)
选择 IOU > 0.7 的 anchor 为 foreground,标签为 1
labels_per_image = matched_idxs >= 0
忽略 0.3 < IOU < 0.7 的 anchor,不参与训练
从 FasterRCNN 类的 __init__ 函数默认参数就可以清晰的看到这一点:
rpn_fg_iou_thresh=0.7, rpn_bg_iou_thresh=0.3,
接着来看 RoIHeads 类中的 assign_targets_to_proposals 函数。
def assign_targets_to_proposals(self, proposals, gt_boxes, gt_labels):
# type: (List[Tensor], List[Tensor], List[Tensor])
matched_idxs = []
labels = []
for proposals_in_image, gt_boxes_in_image, gt_labels_in_image in zip(proposals, gt_boxes, gt_labels):
if gt_boxes_in_image.numel() == 0:
# Background image
device = proposals_in_image.device
clamped_matched_idxs_in_image = torch.zeros(
(proposals_in_image.shape[0],), dtype=torch.int64, device=device
)
labels_in_image = torch.zeros(
(proposals_in_image.shape[0],), dtype=torch.int64, device=device
)
else:
# set to self.box_similarity when https://github.com/pytorch/pytorch/issues/27495 lands
match_quality_matrix = box_ops.box_iou(gt_boxes_in_image, proposals_in_image)
matched_idxs_in_image = self.proposal_matcher(match_quality_matrix)
clamped_matched_idxs_in_image = matched_idxs_in_image.clamp(min=0)
labels_in_image = gt_labels_in_image[clamped_matched_idxs_in_image]
labels_in_image = labels_in_image.to(dtype=torch.int64)
# Label background (below the low threshold)
bg_inds = matched_idxs_in_image == self.proposal_matcher.BELOW_LOW_THRESHOLD
labels_in_image[bg_inds] = torch.tensor(0)
# Label ignore proposals (between low and high thresholds)
ignore_inds = matched_idxs_in_image == self.proposal_matcher.BETWEEN_THRESHOLDS
labels_in_image[ignore_inds] = torch.tensor(-1) # -1 is ignored by sampler
matched_idxs.append(clamped_matched_idxs_in_image)
labels.append(labels_in_image)
return matched_idxs, labels
与 assign_targets_to_anchors 不同,该函数设置:
box_fg_iou_thresh=0.5, box_bg_iou_thresh=0.5,
IOU > 0.5 的 proposal 为 foreground,标签为对应的 class_id
labels_in_image = gt_labels_in_image[clamped_matched_idxs_in_image]
这里与上面不同:RegionProposalNetwork 只需要判断 anchor 是否有目标,正类别为1;RoIHeads 需要判断 proposal 的具体类别,所以正类别为具体的 class_id。
IOU < 0.5 的为 background,标签为 0
labels_in_image[bg_inds] = torch.tensor(0)
写在最后
本文简要的介绍了 torchvision 中的 FasterRCNN 实现,并分析我认为重要的知识点。写这篇文章的目的是为阅读代码困难的小伙伴做个指引,鼓励入门新手能够多看看代码实现。若要真正的理解模型(不被面试官问住),要是要看代码!
创作不易,不想被白嫖,求点赞、关注、收藏(作者)三连!
往期精彩: