
(附论文&代码)CenterFusion:雷达和摄像头融合的3D目标检测方法
点击左上方蓝字关注我们

作者 | 黄浴@知乎
链接 | https://zhuanlan.zhihu.com/p/345845006
以前提到过此文(在想法中),WACV‘2021录取:“CenterFusion: Center-based Radar and Camera Fusion for 3D Object Detection“,作者来自田纳西大学。
论文:https://arxiv.org/abs/2011.04841
作者提供了代码:
https://github.com/mrnabati/CenterFusion
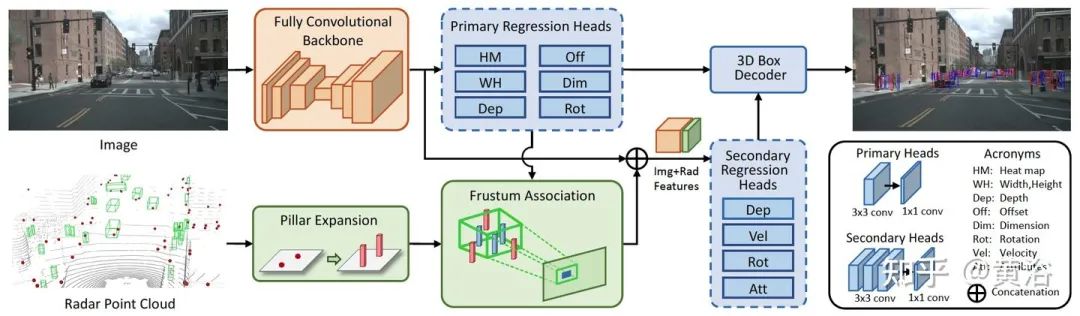
网络架构如图所示:跟摘要说的那样,细节见下面模块分析。
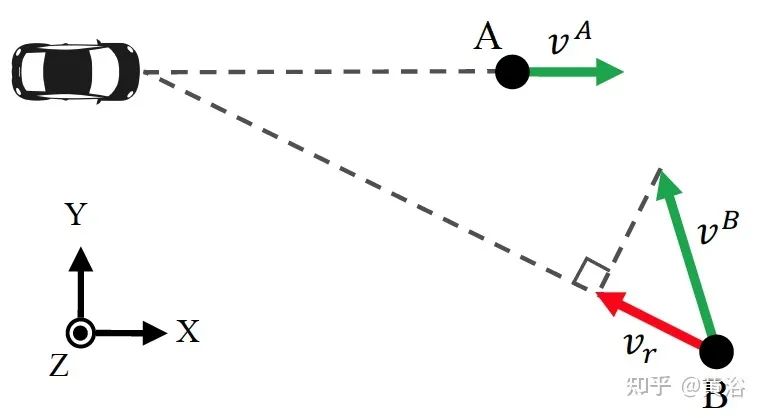
首先,需要搞清楚雷达信号检测的是径向深度和目标实际速度的不同,如图:
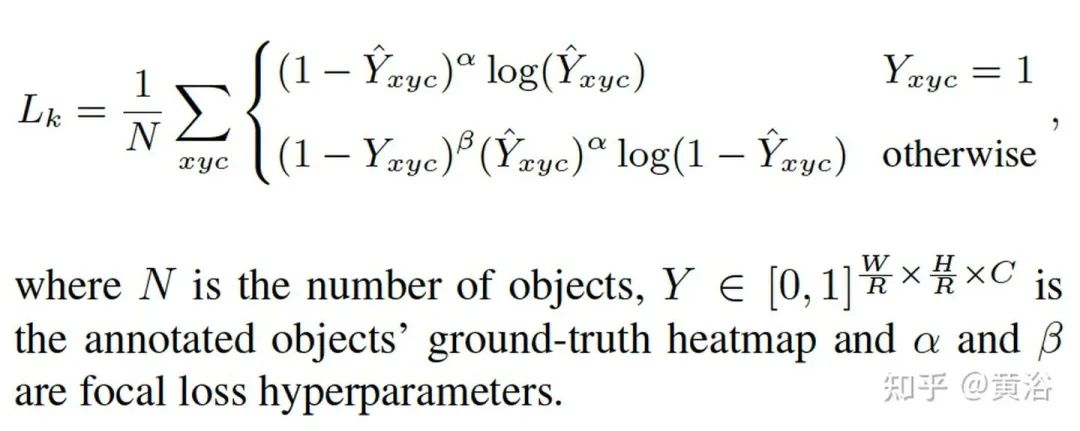
作者采用CenterNet方法,无锚单目的目标检测方法。其中keypoint的heatmap定义为:


采用一个卷积encoder-decoder网络预测Y。基于此,回归3D目标的深度、尺寸和朝向。其训练分类损失,即focal loss:
CenterFusion利用CenterNet先得到一个初步检测,然后修正的DLA(deep layer aggregation)网络作为主干,在primary regression head中预测初步的3D目标信息,其中构成包括一个3X3的卷积层和一个1X1的卷积层。
Frustum association是关键融合雷达和图像的机制。用图像2D框和其深度+大小的估计构建一个3D RoI frustum,如图所示:

如果有多个雷达检测点在这个RoI,直接取距离最近的一个。注意这里提到一个scaling factor可增大frustum尺寸,以便包容深度估计的误差。
另外,目标高度的不准确,作者采用Pillar expansion对雷达点云做预处理。如图所示:第一行是雷达点云扩大成3D pillar的显示,第二行是直接把pillars和图像匹配的结果,相关较弱。第三行是frustum相关,减少了上面的深度值重叠,也防止背景目标(如大楼)错分类成前景。

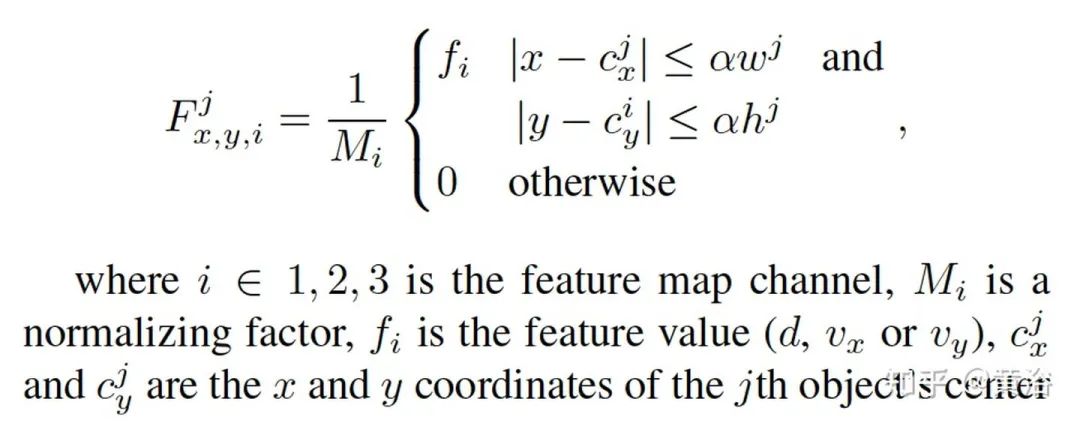
图像和雷达的数据相关之后,可以提取雷达目标特征,深度和速度等。

如果两个目标有重叠的heatmap区域,按距离取最近的。
之后,这些特征进入secondary regression head,其结构包括3个3X3卷积层和一个1X1卷积层。最后结果需要经过一个box decoder得到。
训练中regression head的损失采用SmoothL1 loss,center point heatmap采用focal loss,而attributes regression head基于Binary Cross Entropy (BCE) loss。
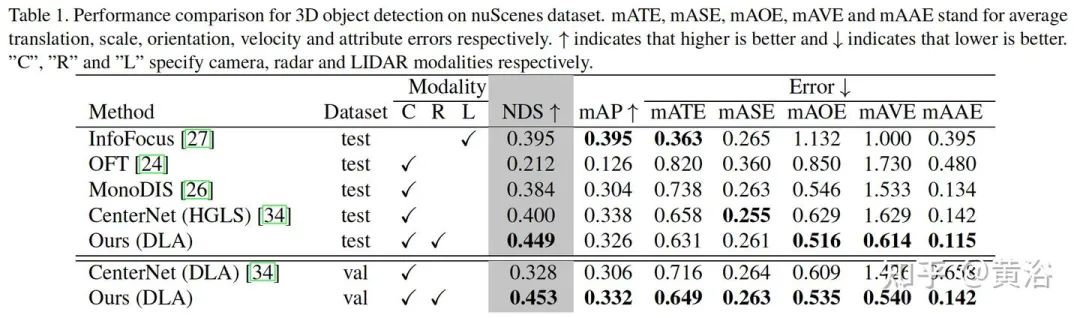
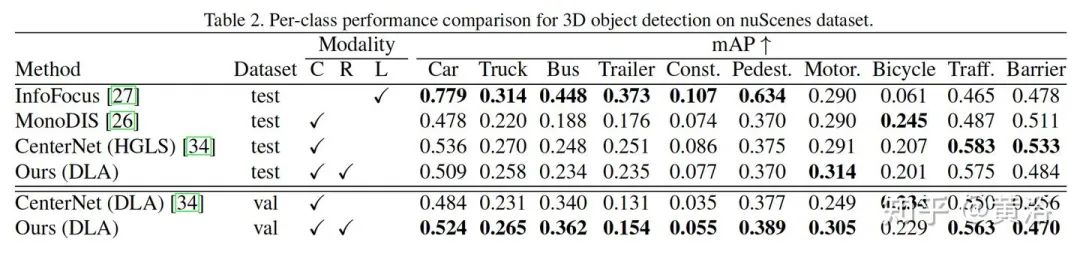
看一下结果:
性能比较表
直观结果比较如下:1-2行CenterFusion,3-4行CenterNet。
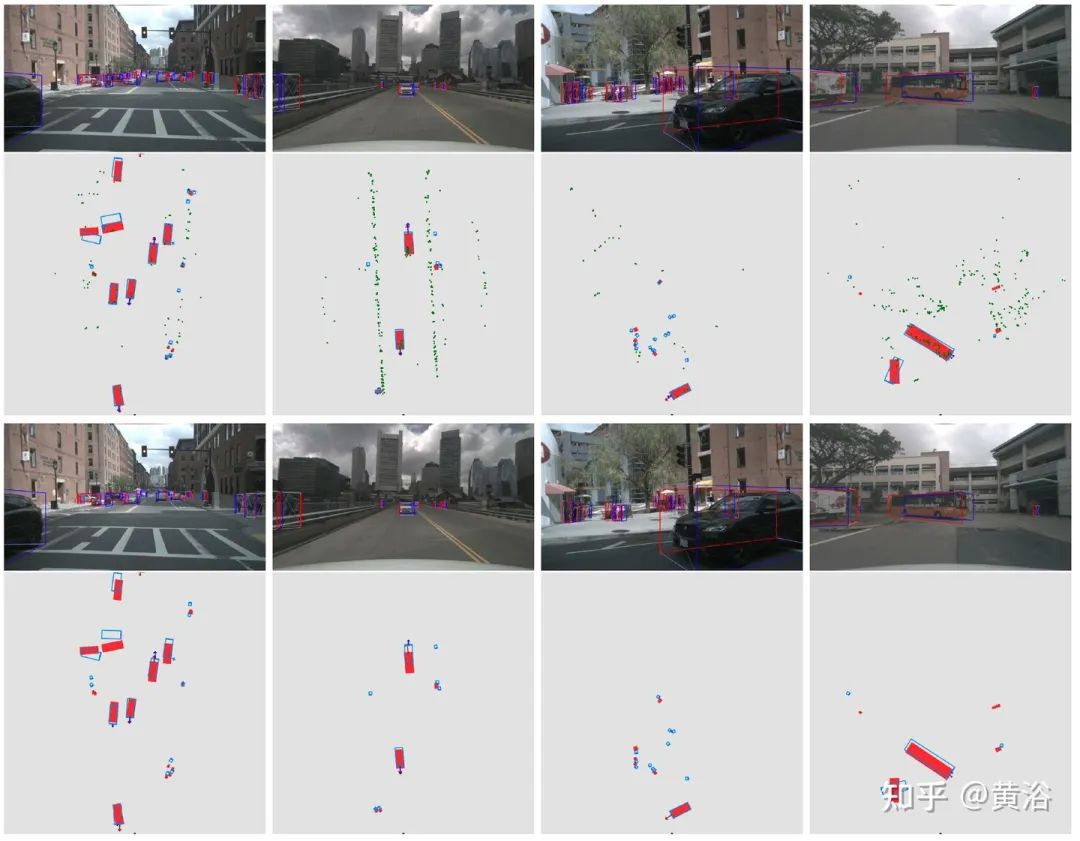
雷达点云绿色,目标框GT红色,目标预测速度蓝色箭头。
END
整理不易,点赞三连↓