视觉成像技术帮助机器人和汽车看得更清楚
点击下方卡片,关注“新机器视觉”公众号
重磅干货,第一时间送达
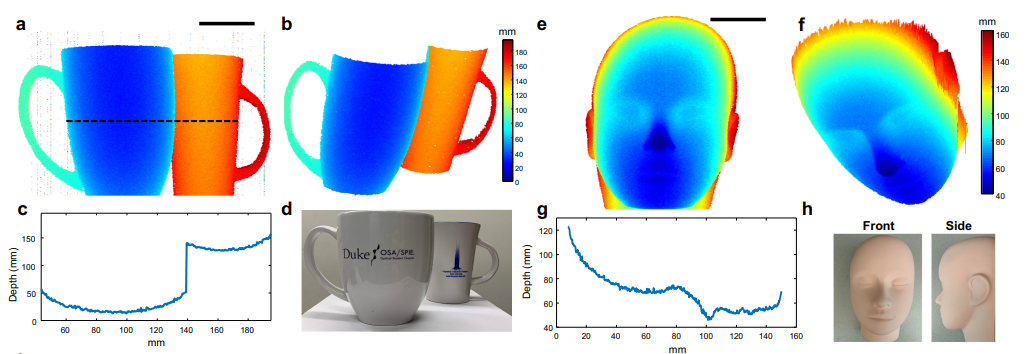
图1:真实世界物体的视频速率3D成像结果。a–d轴向间隔>9 cm的两个陶瓷咖啡杯的成像结果;e–h人体头部模型的成像结果
信息来源:Duke University
本文仅做学术分享,如有侵权,请联系删文。
评论
 下载APP
下载APP点击下方卡片,关注“新机器视觉”公众号
重磅干货,第一时间送达
图1:真实世界物体的视频速率3D成像结果。a–d轴向间隔>9 cm的两个陶瓷咖啡杯的成像结果;e–h人体头部模型的成像结果
信息来源:Duke University
本文仅做学术分享,如有侵权,请联系删文。