
欧卡智舶发布全球首个城市内河无人驾驶数据集!
↑↑↑关注后"星标"Datawhale
欧卡智舶技术专题发布
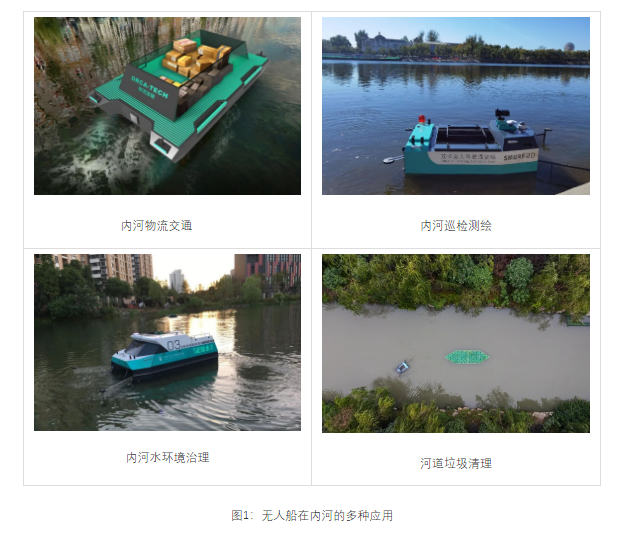
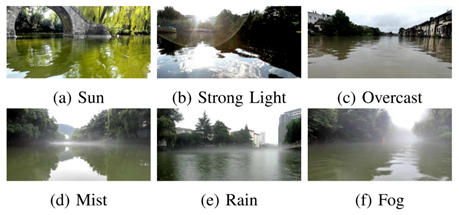
最近,欧卡智舶联合清华大学与西北工业大学的研究学者公开了一个针对真实内河水域场景下多传感器、多天气条件下的内河无人船数据集USVlnland 。为无人船及水面自动驾驶领域相关研究者提供一个平台和基准,推动解决内河无人船在真实场景应用中面临的挑战。
论文地址:https://arxiv.org/abs/2103.05383 下载链接:http://www.orca-tech.cn/datasets
 |  |
 |  |  |
 |  |

评论