首个内河无人驾驶数据集公布!清华大学等高校联合AI公司开发
来源:大数据文摘 本文约1300字,建议阅读6分钟 清华大学与西北工业大学的研究人员联合欧卡智舶公开了一组内陆水道中无人船的多传感器数据集——USVInland。

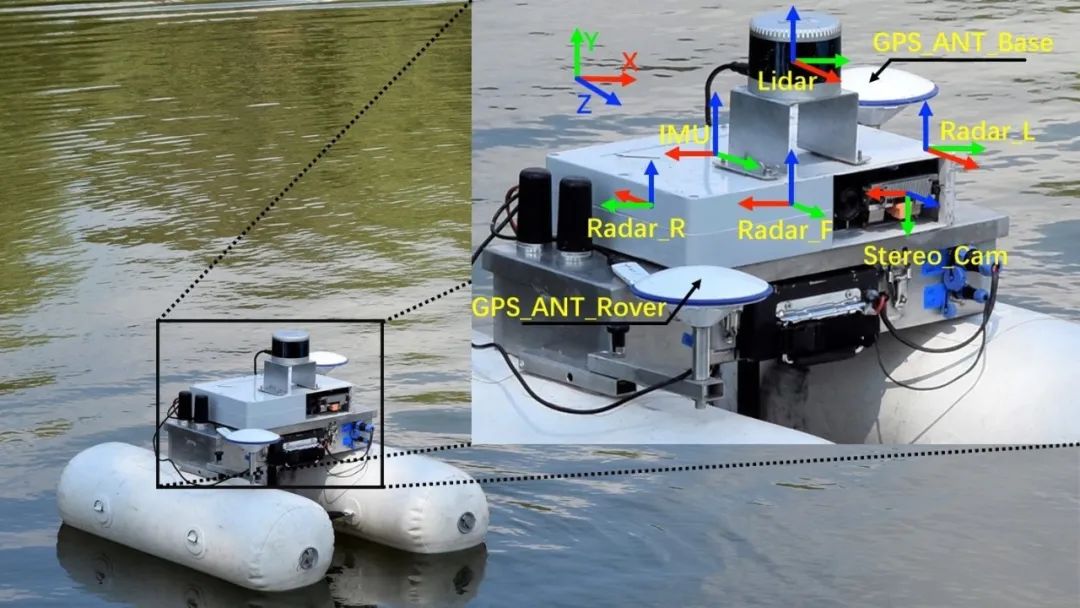

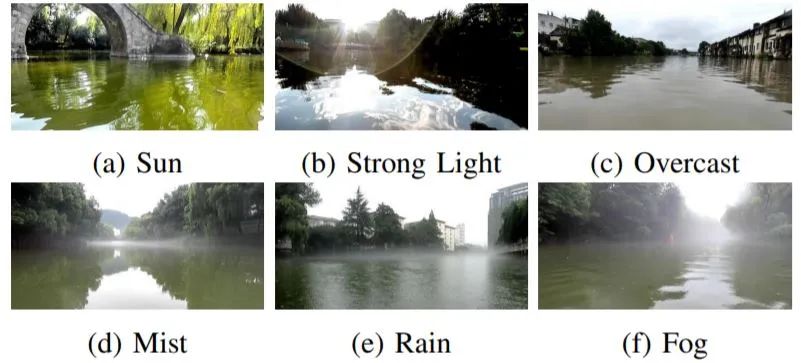
耗时4个月,风雨无阻采集多种数据


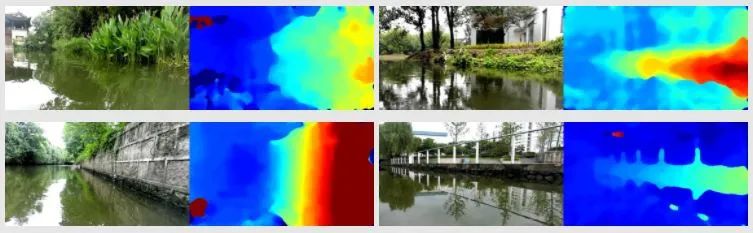
数据集含有多种算法支持

进一步拓展数据集,为行业提供支持
编辑:文婧
评论
 下载APP
下载APP来源:大数据文摘 本文约1300字,建议阅读6分钟 清华大学与西北工业大学的研究人员联合欧卡智舶公开了一组内陆水道中无人船的多传感器数据集——USVInland。
编辑:文婧