
首个内河无人驾驶数据集公布!清华大学等高校联合AI公司开发
大数据文摘授权转载自机器人大讲堂
如今,无人驾驶技术日益成熟,无人机随处可见,无人驾驶汽车也经常登上头条。
天上和地上都有“无人设备”了,那水上呢?
当然是AI船长——“无人船”了!
海洋上的无人船技术近年来可谓是“百花齐放”,甚至听说单靠CPU就能开发在海上的无人船。
然而,内陆河道中的无人船技术还非常有限,这是由于内陆水道比较狭窄,GPS信号会由于河岸植被、河道旁建筑以及桥梁的遮挡而减弱,并且在内河中,无人船的姿态变化更加频繁,所以无人驾驶和海上无人船技术的通用策略在内河上是行不通的。
针对以上挑战,清华大学与西北工业大学的研究人员联合欧卡智舶公开了一组内陆水道中无人船的多传感器数据集——USVInland,据说该数据集是全球第一个内河场景下的无人船数据集。

耗时4个月,风雨无阻采集多种数据
“世界上第一个内河无人船数据集”!这么牛的数据集USVInland是怎么来的呢?
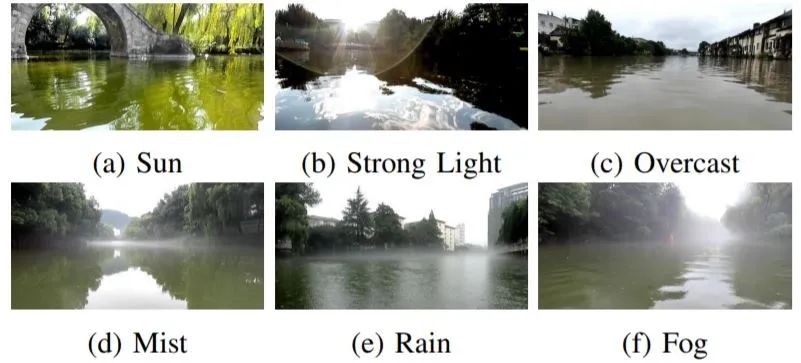
研究人员花了四个月的时间,利用自家无人驾驶船风雨无阻地在各种天气条件下、不同的时间段、以及不同的内陆河道场景中收集。
USVInland数据集涵盖了内河的大多数驾驶情况,共采集到了27段原始数据,总行驶距离超过26公里。
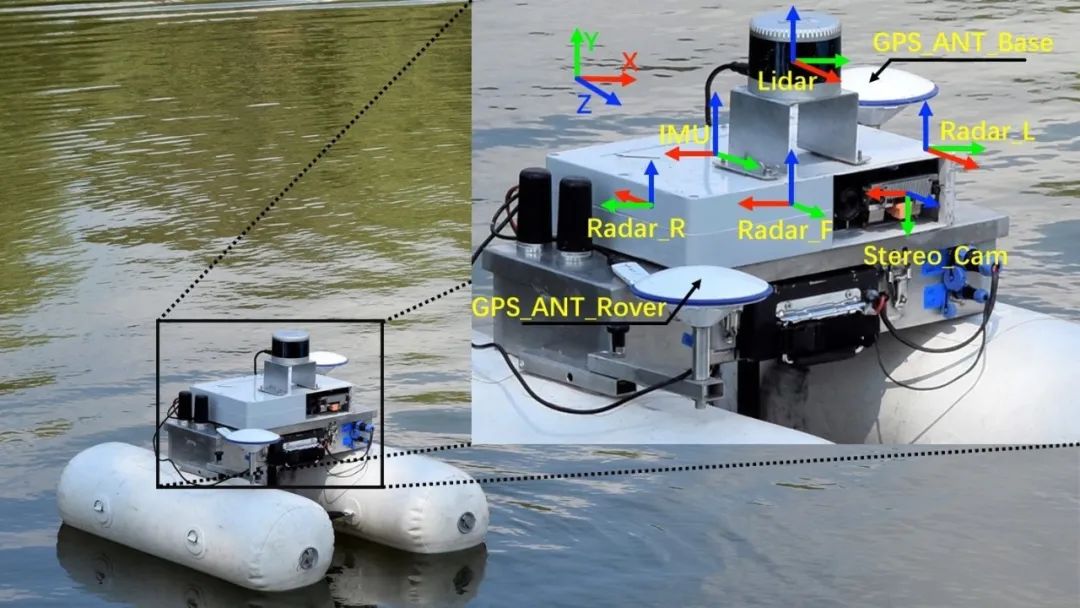
这些数据来源于无人船上安装的多个传感器,包括激光雷达系统,立体摄像机,毫米波雷达,GPS天线和惯性导航系统IMU。

其中,激光雷达系统可以精确捕获船上的3D属性,3个毫米波雷达负责提供周围环境点云数据。
为了同步多个传感器的数据,在收集开始时,研究人员首先记录每个传感器捕获的帧的绝对时间戳。然后,将每个传感器内部时钟的每个帧的准确相对时间戳与传感器数据一起记录下来。这种方法的同步精度很高,可以很好地满足内陆水道场景的要求。

数据集含有多种算法支持
受到目前发布最早、影响力最大的自动驾驶算法评测数据集KITTI的启发,USVInland数据集引入了SLAM(同时定位与地图构建)、立体匹配和水岸分割任务。
SLAM对于内河的无人船是必需的,尤其是在无法直接测量船的位置的情况下,数据来自无人船GPS位置和IMU姿态信息的输出。SLAM基准测试总共包含33个公共序列,这些公共序列是从27个原始序列中剪切而来的,每个SLAM序列的持续时间范围从100秒到2600秒。
在内河航道的复杂场景中,可靠的立体声匹配系统有助于安全导航。立体匹配子数据集中有324个图像对,为了生成立体匹配基准的地面实况,地面真实数据是从激光雷达点云生成的。
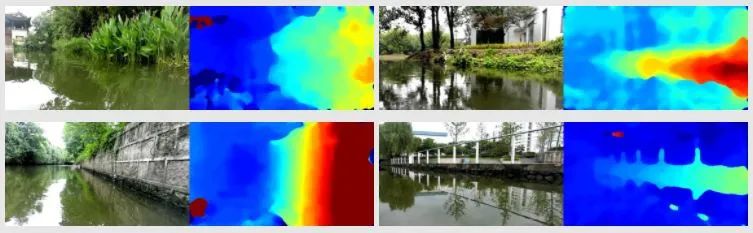
水岸分割则有助于无人船区分可航行区域和障碍物、河面反射和真实物体;水分割基准包含700张图像,这些图像是通过手动选择具有各种水线形状的水道图像来选择的。其中,有518张相对低分辨率(640*320)和182张相对高分辨率(1280*640)的图像以及注释数据。

在应用了多种算法后,研究团队证实了:将自动驾驶的通用方法应用于内河航道场景时效果并不好,也不满足无人船安全航行的要求。
进一步拓展数据集,为行业提供支持
欧卡智舶的研究团队表示,USVInland数据集的发布,是为无人船及水面自动驾驶领域相关研究者提供一个平台和基准,并促进该领域的发展。
接下来,他们将计划继续拓展数据集,例如更多的历史数据,以便对现实世界内陆水道中的USV的长期SLAM进行研究。
【参考链接】
论文地址:
下载链接:
http://www.orca-tech.cn/datasets
