什么是 Canny 边缘检测算法?
↑ 点击蓝字 关注极市平台
作者丨小白
来源丨小白学视觉
编辑丨极市平台
极市导读
Canny 边缘检测器是一种多步算法,用于检测任何输入图像的边缘。本文介绍了在Canny算法过程中需要遵循的步骤、非最大抑制以及滞后阈值。>>加入极市CV技术交流群,走在计算机视觉的最前沿
一、简介
Canny 边缘检测器是一种多步算法,用于检测任何输入图像的边缘。它涉及在检测图像边缘时要遵循的以下步骤。
1. 使用高斯滤波器去除输入图像中的噪声。
2.计算高斯滤波器的导数,计算图像像素的梯度,得到沿x和y维度的幅度。
3. 考虑垂直于给定边缘方向的任何曲线的一组邻居,抑制非最大边缘贡献像素点。
4. 最后,使用滞后阈值方法保留高于梯度幅值的像素,忽略低于低阈值的像素。
在深入研究以下步骤之前,是推导出该算法的 JK Canny 得出的三个结论:
-良好的检测:最佳检测器必须消除出现误报和漏报的可能性。
-良好的定位:检测到的边缘必须尽可能接近真实边缘。
-单响应约束:检测器必须只为每个边缘点返回一个点。
二、在Canny算法过程中需要遵循的步骤
降噪或图像平滑:
在存在噪声期间,像素可能与其相邻像素不接近。这可能导致获得不适当或不适当的边缘检测。为了避免同样的情况,我们使用高斯滤波器,它与图像卷积并去除噪声,防止输出图像中出现所需的边缘。
在下面的示例中,我们将高斯滤波器或核 g(x,y) 与图像 I 进行卷积。在这里,我们希望确保任何给定的像素必须与输出中的相邻像素相似,因此我们使用矩阵 [1 1 1] 保持像素之间的相似性并去除噪声。


g(x,y)= 高斯分布
I = 输入图像
衍生品:
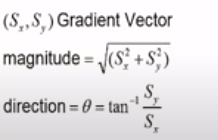
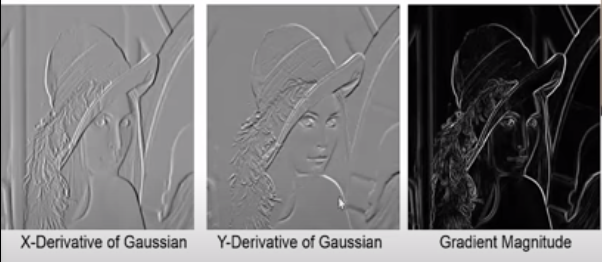
计算滤波器对 X 和 Y 维度的导数,并将其与 I 卷积以给出沿维度的梯度幅度。此外,可以使用两个维度之间的角度的正切来计算图像的方向。
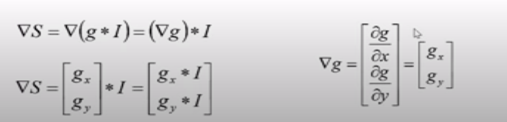
上述卷积产生具有大小和方向的梯度向量。
下面是一个高斯导数的例子,它最终有助于输出图像中的边缘。
三、非最大抑制
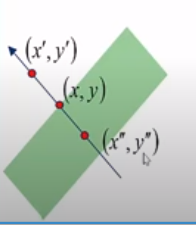
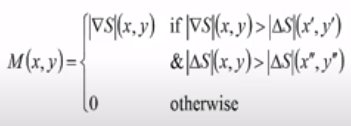
沿着边缘,通常观察到很少有点使边缘的可见性更清晰。所以我们可以忽略那些对特征可见性贡献不大的边缘点。为了达到同样的目的,我们使用非最大抑制方法。这里我们标记边缘曲线上幅度最大的点。这可以通过寻找最大值以及与曲线垂直的切片来获得。
考虑下图中的边缘,它具有三个边缘点。假设点 (x,y) 为具有最大边缘梯度的点。检查垂直于边缘方向的边缘点,并验证它们的梯度是否小于 (x,y)。如果这些值小于 (x,y) 梯度,那么我们可以抑制曲线上的那些非最大值点。
四、滞后阈值
五、总结
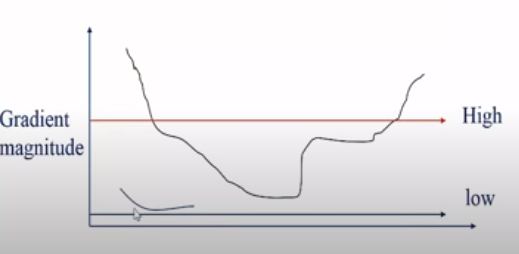
如果一个像素的梯度是:
- 在“高”上方将其声明为“边缘像素”。
- 下面,“低”将其声明为“非边缘像素”。
- 在“低”和“高”之间。
迭代地考虑它的邻居,如果它连接到“边缘像素”或通过“低”和“高”之间的像素连接,则将其声明为“边缘像素”。
如果觉得有用,就请分享到朋友圈吧!
△点击卡片关注极市平台,获取最新CV干货
公众号后台回复“79”获取CVPR 2021:TransT 直播链接~
极市干货
YOLO教程:一文读懂YOLO V5 与 YOLO V4|大盘点|YOLO 系目标检测算法总览|全面解析YOLO V4网络结构
实操教程:PyTorch vs LibTorch:网络推理速度谁更快?|只用两行代码,我让Transformer推理加速了50倍|PyTorch AutoGrad C++层实现
算法技巧(trick):深度学习训练tricks总结(有实验支撑)|深度强化学习调参Tricks合集|长尾识别中的Tricks汇总(AAAI2021)
最新CV竞赛:2021 高通人工智能应用创新大赛|CVPR 2021 | Short-video Face Parsing Challenge|3D人体目标检测与行为分析竞赛开赛,奖池7万+,数据集达16671张!

# CV技术社群邀请函 #
△长按添加极市小助手
添加极市小助手微信(ID : cvmart2)
备注:姓名-学校/公司-研究方向-城市(如:小极-北大-目标检测-深圳)
即可申请加入极市目标检测/图像分割/工业检测/人脸/医学影像/3D/SLAM/自动驾驶/超分辨率/姿态估计/ReID/GAN/图像增强/OCR/视频理解等技术交流群
每月大咖直播分享、真实项目需求对接、求职内推、算法竞赛、干货资讯汇总、与 10000+来自港科大、北大、清华、中科院、CMU、腾讯、百度等名校名企视觉开发者互动交流~
觉得有用麻烦给个在看啦~