
什么是 Canny 边缘检测算法?
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

Canny 边缘检测器是一种多步算法,用于检测任何输入图像的边缘。它涉及在检测图像边缘时要遵循的以下步骤。
在深入研究以下步骤之前,是推导出该算法的 JK Canny 得出的三个结论:
-良好的检测:最佳检测器必须消除出现误报和漏报的可能性。
-良好的定位:检测到的边缘必须尽可能接近真实边缘。
-单响应约束:检测器必须只为每个边缘点返回一个点。
降噪或图像平滑:
在存在噪声期间,像素可能与其相邻像素不接近。这可能导致获得不适当或不适当的边缘检测。为了避免同样的情况,我们使用高斯滤波器,它与图像卷积并去除噪声,防止输出图像中出现所需的边缘。
在下面的示例中,我们将高斯滤波器或核 g(x,y) 与图像 I 进行卷积。在这里,我们希望确保任何给定的像素必须与输出中的相邻像素相似,因此我们使用矩阵 [1 1 1] 保持像素之间的相似性并去除噪声。

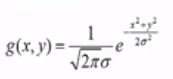
g(x,y)= 高斯分布
I = 输入图像
衍生品:
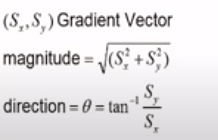
计算滤波器对 X 和 Y 维度的导数,并将其与 I 卷积以给出沿维度的梯度幅度。此外,可以使用两个维度之间的角度的正切来计算图像的方向。
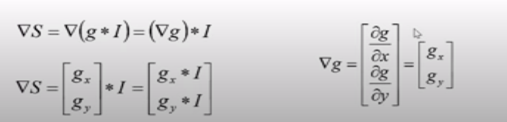
上述卷积产生具有大小和方向的梯度向量。
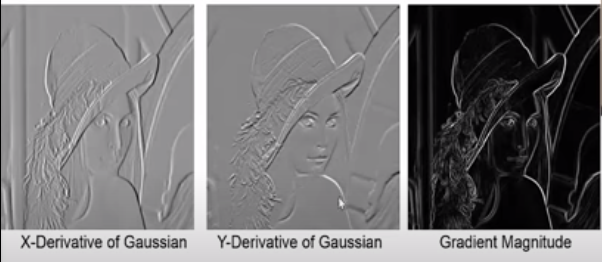
下面是一个高斯导数的例子,它最终有助于输出图像中的边缘。
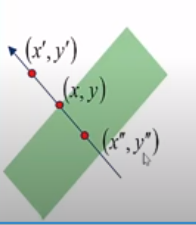
沿着边缘,通常观察到很少有点使边缘的可见性更清晰。所以我们可以忽略那些对特征可见性贡献不大的边缘点。为了达到同样的目的,我们使用非最大抑制方法。这里我们标记边缘曲线上幅度最大的点。这可以通过寻找最大值以及与曲线垂直的切片来获得。
考虑下图中的边缘,它具有三个边缘点。假设点 (x,y) 为具有最大边缘梯度的点。检查垂直于边缘方向的边缘点,并验证它们的梯度是否小于 (x,y)。如果这些值小于 (x,y) 梯度,那么我们可以抑制曲线上的那些非最大值点。
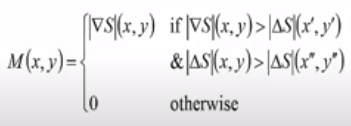
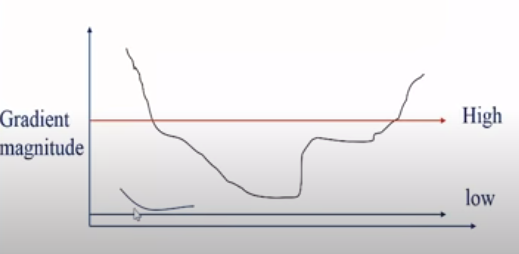
如果一个像素的梯度是:
迭代地考虑它的邻居,如果它连接到“边缘像素”或通过“低”和“高”之间的像素连接,则将其声明为“边缘像素”。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~