
利用OpenCV建立视差图像
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达
推荐阅读

我们都看过3D电影,他们看起来都很酷,这给了我们一个想法,使用一些工具通过改变看图像视角,模拟观众的头部移动。
效果如何?
我们都熟悉"视差"这一术语,它是描述对象在左右眼中的位置差距,视差的大小这取决于我们离它有多远。

视差
因此,如果我们能在2D图像中获得与不同图像层的相同效果,那么我们可以在这些图像中产生类似的感觉,并产生我们想要的酷效果。
让我们分解一下这个过程
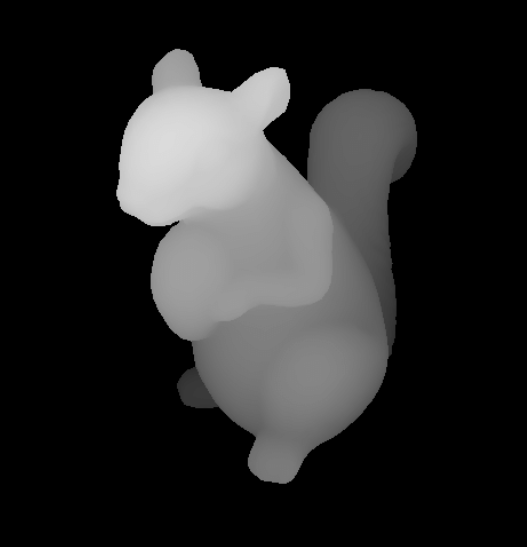
深度图
因此,首先,我们需要将图像分解为不同的图层,并且,我们需要一个2D图像的深度图。深度图只是一个黑白图像,其中图像的白色显示对象与镜头的接近度。获得基本图层后,我们需要从每个图层中画出缺失的部分。最后,我们将单个图像分解成不同的图层。现在,我们可以显示不同的图层,这些图层看起来与原始图像相同。现在,我们可以使用相机进行人脸检测,并测量用户头部的移动,然后移动这些图层并进行匹配。
让我们看看如何编写此工具的代码
因此,首先,我们需要导入一些文件,建议使用版本 4.1.0.25 的 OpenCV。
import os, sysimport numpy as npimport pygame as pgimport cv2
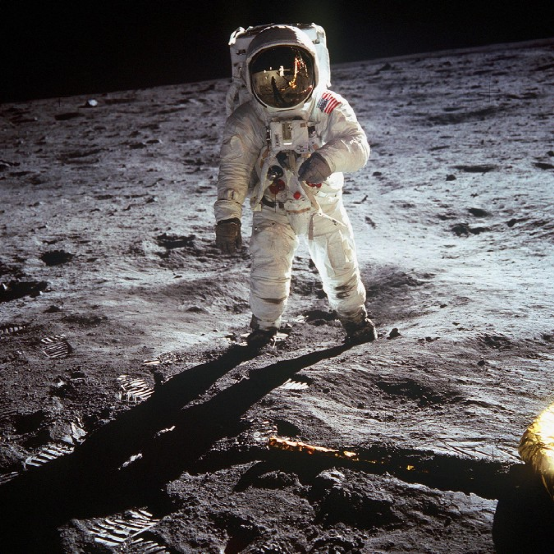
现在,我们需要加载图像和深度图,并调整它们的大小以匹配大小。现在,我们将提供一个深度图、代码,但你可以生成自己的模型MiDaS。
img = cv2.imread('moon.jpg', flags=cv2.CV_8UC4)depth_map = cv2.imread('moon_depth_map.png')depth_map = cv2.cvtColor(depth_map,cv2.COLOR_RGB2GRAY)img = cv2.resize(img, depth_map.shape[:2])
 现在,在加载深度贴图后,我们可以通过按不同阈值对深度贴图不同图层创建蒙版。在制作一个图层时,我们需要两个蒙版,一个是该图层,另一个是上一层的第二个蒙版,用于画上一个图层的缺失部分。我们将在循环之外取最后一个图层,以便提取此层中的所有剩余部分。
现在,在加载深度贴图后,我们可以通过按不同阈值对深度贴图不同图层创建蒙版。在制作一个图层时,我们需要两个蒙版,一个是该图层,另一个是上一层的第二个蒙版,用于画上一个图层的缺失部分。我们将在循环之外取最后一个图层,以便提取此层中的所有剩余部分。
layers = []prev_thres = 255div=30for thres in range(255 - div, 0, -div):ret, mask = cv2.threshold(depth_map, thres, 255, cv2.THRESH_BINARY)ret, prev_mask = cv2.threshold(depth_map, prev_thres, 255, cv2.THRESH_BINARY)prev_thres = thresinpaint_img = cv2.inpaint(img, prev_mask, 10, cv2.INPAINT_NS)layer = cv2.bitwise_and(inpaint_img, inpaint_img, mask = mask)layers.append(conv_cv_alpha(layer, mask))# adding last layermask = np.zeros(depth_map.shape, np.uint8)mask[:,:] = 255ret, prev_mask = cv2.threshold(depth_map, prev_thres, 255, cv2.THRESH_BINARY)inpaint_img = cv2.inpaint(img, prev_mask, 10, cv2.INPAINT_NS) layer = cv2.bitwise_and(inpaint_img, inpaint_img, mask = mask)layers.append(conv_cv_alpha(layer, mask))layers = layers[::-1]
我们已经反转了图层,因此我们可以按最后一个层排列到第一层的顺序排列它们。当我们将图层添加到列表中时,我们使用的是函数[conv_cv_alpha],这将添加 alpha 值(使 RGB 到 RGBA),并使用蒙版使图层的某些部分透明。
def conv_cv_alpha(cv_image, mask):g, r = cv2.split(cv_image)rgba = [r, g, b, mask]cv_image = cv2.merge(rgba,4)return cv_image
现在来了人脸检测和显示图像的部分。对于人脸检测,我们将使用哈卡卡德。现在,我们将加载 haar 级联进行人脸检测,并创建一个函数,该函数将从图像中返回人脸。
face_cascade = cv2.CascadeClassifier( 'haarcascade_frontalface_default.xml')def get_face_rect(img):gray_img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)face_rects = face_cascade.detectMultiScale(gray_img, 1.3, 5)if len(face_rects) == 0:return ()return face_rects[0]
现在,我们必须显示图像,将根据用户的头移动。我们将使用OpenCV读取凸轮,然后使用 Pygame将每个帧呈现在彼此的顶部。为了计算每一层的移位,我们将计算从框架中心的头部移位,然后缩小头移位以获得一个小的移位值。之后,我们将每个图层的索引值相乘,以获得相应图层的移位值,还可以乘以一些常量值,以获得更好的结果。
我们将创建一个比原始图像稍小的 Pygame 窗口并加载相机。我们使用了比例,因此您更改其值以使最终结果变大。
scale = 1off_set = 20width, height = layers[0].get_width(), layers[0].get_height() win = pg.display.set_mode((int((width - off_set)*scale), int((height - off_set)*scale)))pg.display.set_caption('Parallax_image')scaled_layers = []for layer in layers:scaled_layers.append(pg.transform.scale(layer, (int(width*scale), int(height*scale))))cap = cv2.VideoCapture(0, cv2.CAP_DSHOW)
我们将设置一些常量。你可以玩这些常量来获得不同的结果。
x_transform = True # allow shift in x-axisy_transform = False # allow shift in y-axissens = 50 # the amount of scale down of shift valueshow_cam = False # show your face camshift_x = 0shift_y = 0run = True
最后,主循环渲染所有图层。
while run:for event in pg.event.get():if event.type==pg.QUIT:run = Falseframe = cap.read()frame = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)initial_pos = (frame.shape[0]/2, frame.shape[1]/2)face_rect = get_face_rect(frame)if len(face_rect) != 0:= face_rectface_rect_frame = cv2.rectangle(frame, (x, y), (x + w, y + h), (255,255,0), 3)shift_x = (initial_pos[0] - (x + w/2))/(sens*scale)shift_y = (initial_pos[1] - (y + h/2))/(sens*scale)255, 255))for i, layer in enumerate(scaled_layers):new_x = -off_set/2new_y = -off_set/2if x_transform:new_x = 0 + shift_x*iif y_transform:new_y = 0 + shift_y*i(new_x, new_y))face_rect_frame = cv2.resize(face_rect_frame, (100, 100))if show_cam:(0, 0))pg.display.update()cap.release()cv2.destroyAllWindows()pg.quit()
就是这里,最终结果。
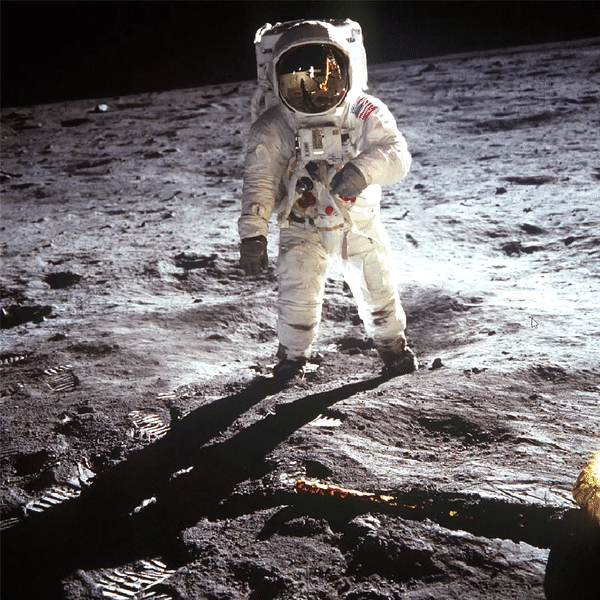
最终结果

不同图像的演示
我已经创建了一个更高级版本的这个工具,你可以只选择图像,它会自动创建视差图像,深度地图将自动生成。
代码链接:https://github.com/strikeraryu/Parallax_Image
下载1:OpenCV-Contrib扩展模块中文版教程
在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。
下载2:Python视觉实战项目31讲
在「小白学视觉」公众号后台回复:Python视觉实战项目31讲,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。
下载3:OpenCV实战项目20讲
在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。
下载4:leetcode算法开源书
在「小白学视觉」公众号后台回复:leetcode,即可下载。每题都 runtime beats 100% 的开源好书,你值得拥有!
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~