
【相机标定+测距+动手设计】用matlab标定摄像机以后,用python在标定平面内建立世界坐标系并测距
点击下方卡片,关注“新机器视觉”公众号
视觉/图像重磅干货,第一时间送达
您需要的基础知识:1.相机成像原理2.计算机标定3.Matlab python编程基础
先给大家看看总目录
1.1任务要求 1.2任务分析
2.1相机的成像原理
2.2深度的测量原理
3.1硬件部分设计
3.1.1标定板的制作
3.1.2标定图像的制作
3.2软件部分设计
3.2.1程序总流程图设计
3.2.2拍摄图像部分流程图设计
3.2.3相机标定的流程图设计
3.2.4测量的流程图设计
3.2.5计算距离的流程图设计
3.3部分重要代码分析
3.3.1拍摄部分
3.3.2相机内参标定部分
3.3.3测量部分
4.1程序运行结果
4.1.1拍摄部分
4.1.2相机标定部分
4.1.3测量部分:
4.2结果分析
4.2.1相机部分
4.2.2标定部分
4.2.3测量部分
4.3总结
5.1相机拍照部分代码
5.2相机标定部分代码
5.3测量部分代码
一、设计任务
1.1 任务要求
摄像机标定使用自制标定板,使用工业摄像机或手机摄像头进行标定。将标定的摄像机内参和外参进行保存。设计测量方案,使用标定过的摄像机对包含垂直边缘的物品(直尺刻度线,矩形物体边缘等)进行距离或边长的测量。标定过程和测量过程,均需要保持摄像机与测量平面之间的距离固定,物品高度不能过高,否则影响测量结果。完成以下设计任务:
系统整体方案设计,包括
结合Halcon(或open CV)软件,写出各功能模块的实现及相应的代码。
1. 标定板制作
2. 摄像机标定
3. 对设计方案中垂直于测量矩形框的直边进行提取,并测量直边之间的距离,从而得到平面测量对象的尺寸
4. 对测量值与实际尺寸误差进行一定的分析和改进5. 多次测量,计算出测量的平均值和标准差
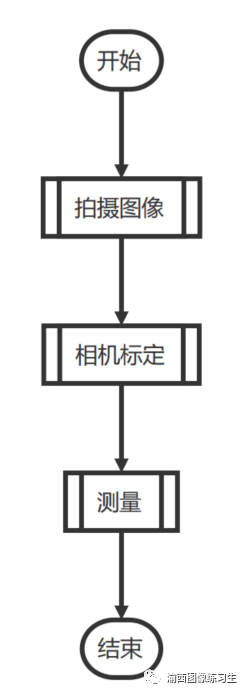
本次任务主程序可以分为三块:相机拍摄,相机标定,测量三大块。
其中,相机拍摄为相机标定主要任务,是获取图像,存储的是图像的参数;
相机标定的主要任务是获取相机的内参;
在测量里面,我们需要用
标定板来确定相机的外参,
然后由于我们在测量图像外参的时候,
默认将标定板作为参考坐标系,
所以只要将相机成像平面中的点投影到Z=0时的成像平面就可以了。
大致方案如下所示:

二、设计原理
2.1 相机成像原理
我们熟知的摄像机是由光线透过透镜折射,反射到成像平面形成的,
本质是利用二维图像获取三维信息的过程。
所以我们可以通过成像的状况来反映三维世界中的信息。

但是,现实模型总会与理想模型存在一些偏差,
这里的偏差主要就是相机内参与畸变系数所导致的。
由于每一个相机都是利用的透镜成像原理,所以很容易产生桶形畸变或者是枕形畸变。
所以一个三维的图像到OpenCV显示的画面需要经历三个变化,这三个变化对应的参数分别是相机位姿参数,畸变技术,相机内参。
具体的内容,请参看我之前的推文:
2.2 深度的测量原理
这里我使用的是一个单目摄像机。
如果不移动相机,我们是无法获取三维平面内的尺度信息和深度信息的。
但是我们可以获取三维平面内的比例关系。
这时候我们需要知道更多的参数。在这次的任务里面,我们需要的参数有两个:
一个是相机的位姿参数,一个是成像平面。
知道了这两个参数,我们就可以将摄像机内二维平面内的点投射到三维的坐标中去,再利用三维坐标轻松算出点与点之间的距离。
默认将世界坐标系的原点放在标定板第一个角点上。
所以,我们只需要将成像平面设置为Z=0,即XOY面就可以了,这时我们便获得了需要计算深度信息的所有参数。
三、方案整理及各个功能模块的设计
3.1 硬件部分设计
3.1.1标定板的制作
可能大家不知道Matlab还可以制作标定板吧
cb=(checkerboard(300,4,5)>0.5);figure,imshow(cb);
得到的标定板如下:

将其打印下来,或者放在ipad/pc上,
(这个时候要知道ipad和电脑的尺寸)
3.1.2 标定图像的制作
为了方便测量,我选用了一个红色的长方形来做测量的模块。如下图所示:

实际长度在118.4-118.5毫米。
3.2 软件部分
3.2.1 程序总流程图设计
3.2.2 相机标定流程
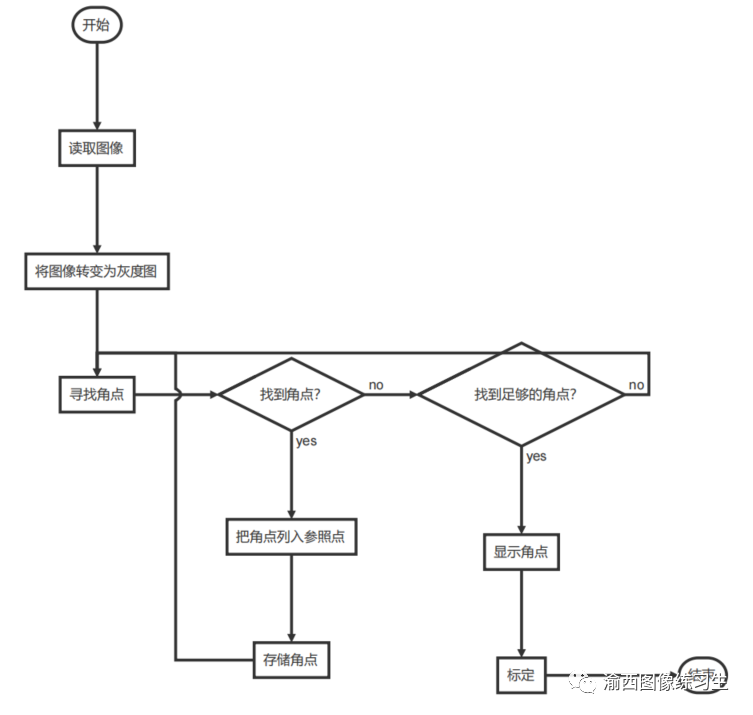
相机标定主要是对棋盘角点的寻找,然后再储存角点,
(这里就需要角点检测的知识,如果不太懂,大家可以去百度一下)
如果储存到了足够多的角点的话,就退出程序的循环,进行标定。
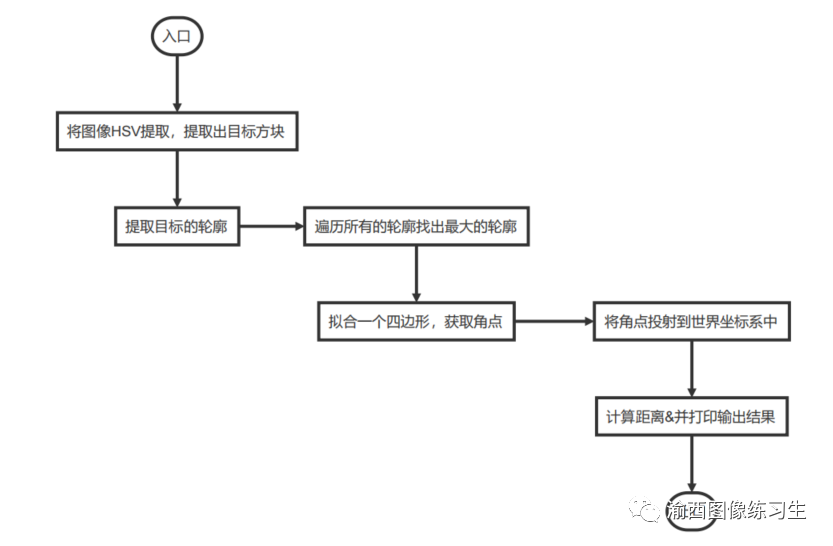
3.2.3 计算距离流程
之前为什么要用红色物体作为被测物体
是因为红色在HSV模式下更容易被分离出来
3.3 重要代码部分
拍摄部分
if key == ord('s'):cv.imwrite(filepath +img_name + str(a)+'.png',frame) # 按s截取图像a = a + 1 # 改变截取图像的名称if key == ord('q'):break # 如果检测到按键为esc,就退出摄像
相机参数标定部分
ret, corners = cv2.findChessboardCorners(gray, (7, 5), None)# 如果找出角点,把角点加入坐标系内if ret == True:objpoints.append(objp * 30)# 参照criteria进行亚像素检验corners2 = cv2.cornerSubPix(gray, corners, (11, 11), (-1, -1), criteria)imgpoints.append(corners2)# 将角点显示出来img = cv2.drawChessboardCorners(img, (7, 5), corners2, ret)cv2.imwrite(sys.path[0] + "/标定结果/" + "result" + str(a) + ".png", img)a = a + 1
findChessboardCorners是一个检测标定板角点的函数,
如果检测到了角点,
就以criteria的规则进行亚像素检验,
然后再将所有的角点储存下来,
将检测到的角点显示并且将显示角点的图像保存下来。
测量部分
f Find:# 获取更精确的角点位置(亚像素精度)exact_corners = cv2.cornerSubPix(gray, corners, (11, 11), (-1, -1), criteria)# 获取外参,其中rvec是旋转矩阵,tvec是平移矩阵rvec, tvec, inliers = cv2.solvePnPRansac(world_point, exact_corners, IntrinsicMatrix, distC# 获取两个平面(像素平面与实际平面)的映射关系,其中RMat是相机平面到Z=0轴的投影Mat = cv2.findHomography(D_2_point, exact_corners)[0]RMat = cv2.findHomography(exact_corners, D_2_point)[0]# print(np.transpose(np.dot(Mat,[[24.575*3,0],[0,24.575*3],[1,1]])))# 这里打印的是一个投影的值# 根据3D坐标,获取投影的二维坐标jac = cv2.projectPoints(axis, rvec, tvec, IntrinsicMatrix, distCoeffs)# 可视化角点,画出图像img = draw(image, corners, imgpts)# cv2.imshow('img', img)return [Mat, RMat, corners, imgpts]
同样的,这里依然进行摄像机标定,
不过这里进行的是摄像机外参的标定,
通过投影的方法找到相机的内参和外参,
再返回一个相机位姿矩阵。
contours, hierarchy = cv2.findContours(image_2, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)for contour in contours:arclength = cv2.arcLength(contour, True)# print(arclength)a.append(arclength) # 长度保存在数组中maxlen = max(a)for contour in contours:arclength = cv2.arcLength(contour, True)if arclength == maxlen:dot = cv2.approxPolyDP(contour,5,True)dot = np.int0(dot)cv2.drawContours(image, [dot], 0, (0, 0, 0), 1)
用HSV参数进行阈值化处理后,findContours作用是找出目标物体的外轮廓,返回的contour是轮廓的点集。
考虑到在图像里面会有很多干扰点,所以我们要将最大的轮廓给过滤出来。approxPolyDP表示的是多边形拟合,在这个函数中,返回的是图像中四边形的四个角点。
根据图像里面返回的四个角点,以及相机位姿及其内参,三维空间里平面参数,我们很容易将图像的几个点在三维空间里面描述出来。也就很容易知道四边形对应的矩形几个边的边长了。
四、结果展示和分析
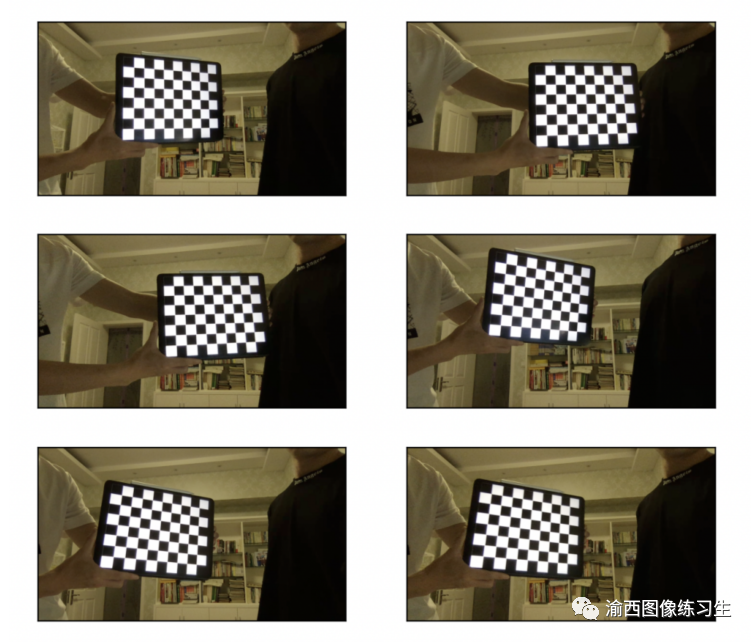
拍出来以下的图像以备相机内参标定:
拍出以下图片准备外参标定:

拍出以下图片准备测量长度:
MATLAB结合标定出来的位姿,
用MATLAB作图如下,一共选取了5张图像作为标定的图像

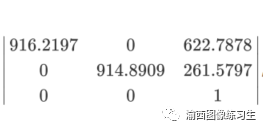
得到的内参矩阵:
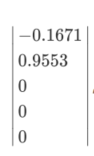
畸变矩阵:
测量结果:

今天的教程就到这里为止了
—版权声明—
仅用于学术分享,版权属于原作者。
若有侵权,请联系微信号:yiyang-sy 删除或修改!