
机器人与视觉标定理论详解
相机固定不动, 上往下看引导机器人移动
相机固定不动, 上往下看引导机器人移动
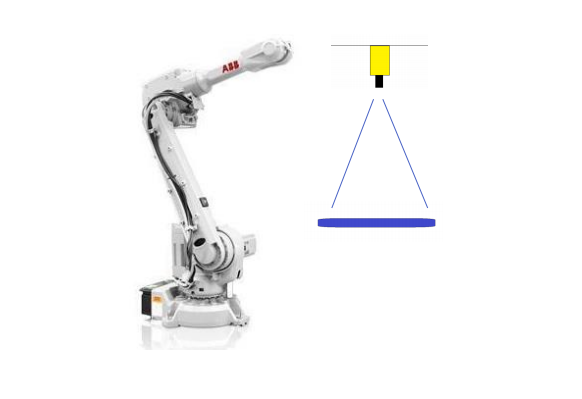
相机固定不动, 下往上看
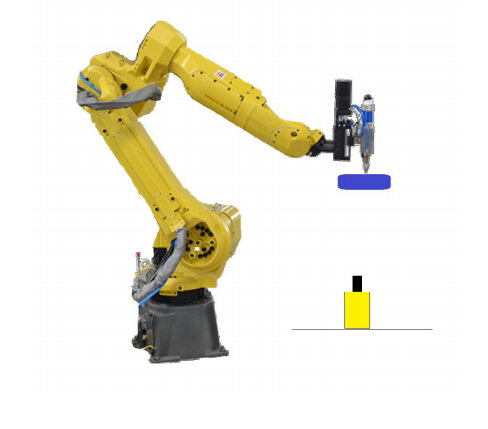
相机固定在机器人上,离旋转中心较近
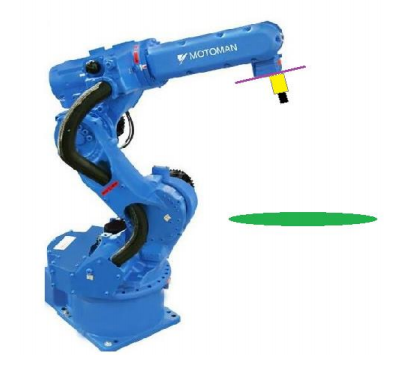
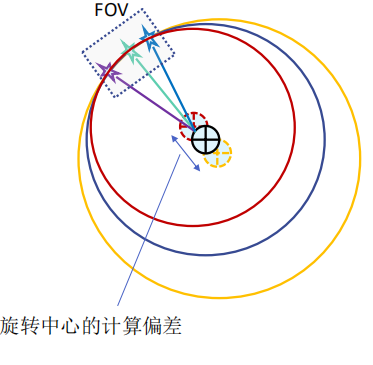
相机固定在机器人上,离旋转中心很远
分离轴
旋转中心标定说明

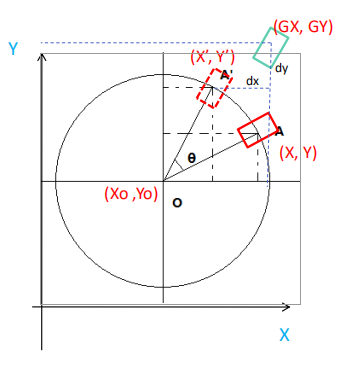
点坐标旋转方法
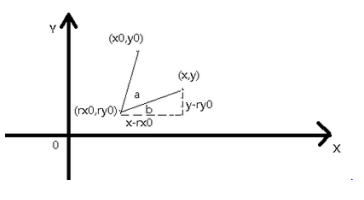
下面计算所有的旋转和偏移量均是基于上面的公式
旋转中心标定说明
STD方法的计算:
特别注意
旋转中心法的计算:
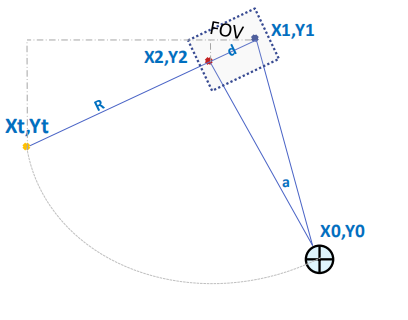
求旋转中心方法

解法
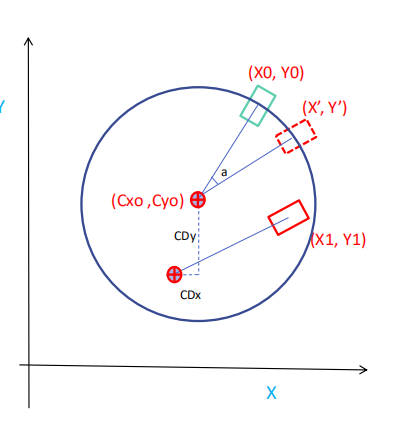
旋转中心标定—计算补偿
CDx Cdy计算过程,旋转角度a
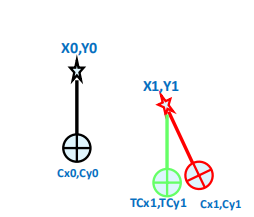
如何求解StDx和StDy
 End
End
声明:部分内容来源于网络,仅供读者学术交流之目的。文章版权归原作者所有。如有不妥,请联系删除。

评论