
【视觉】一文了解目前所有的视觉三维重建技术
点击下方卡片,关注“新机器视觉”公众号
视觉/图像重磅干货,第一时间送达
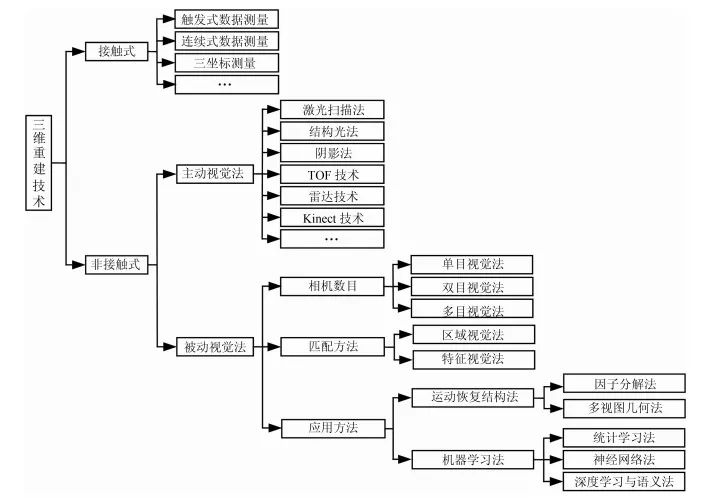
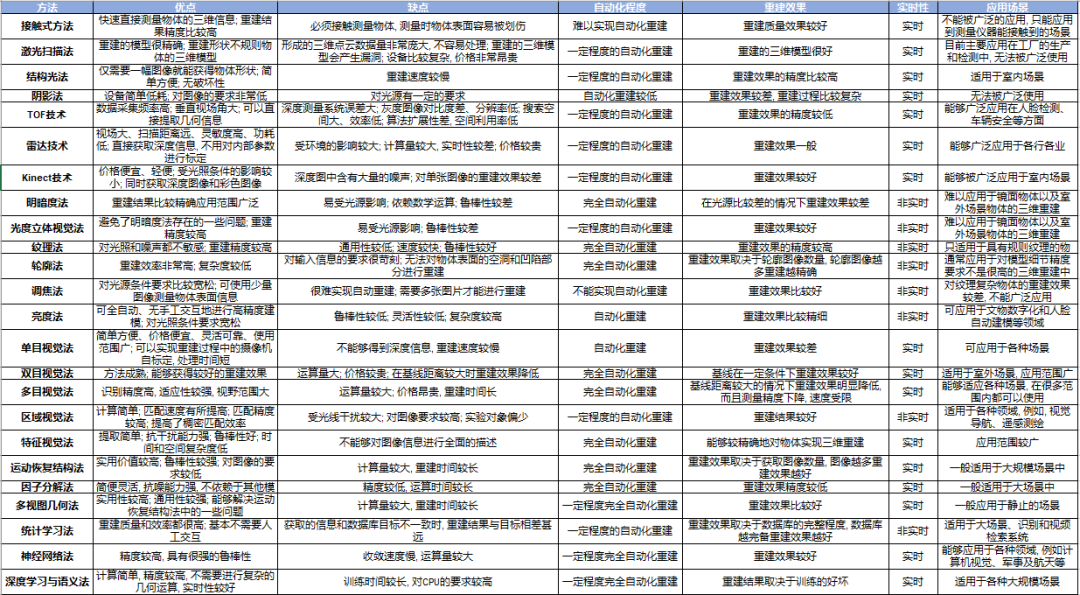
基于主动视觉的三维重建技术
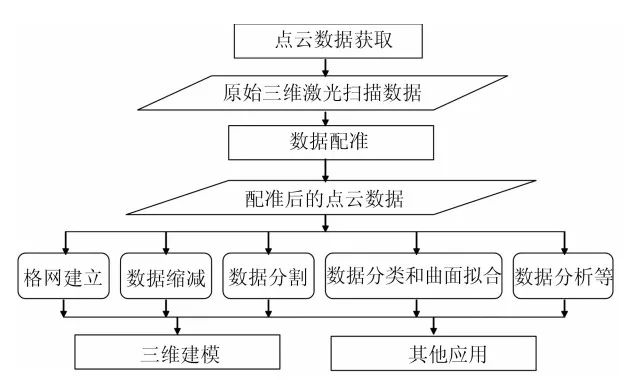
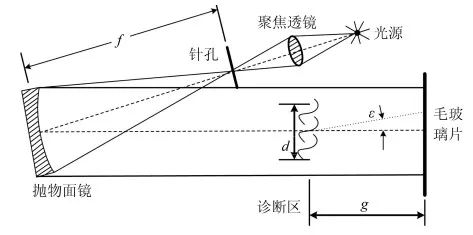
1 激光扫描法
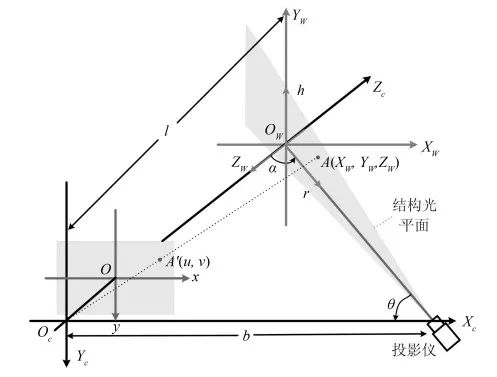
2 结构光法
3 阴影法
4 TOF技术
6 Kinect技术

基于被动视觉的三维重建技术
1 根据相机数目分类
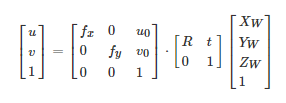
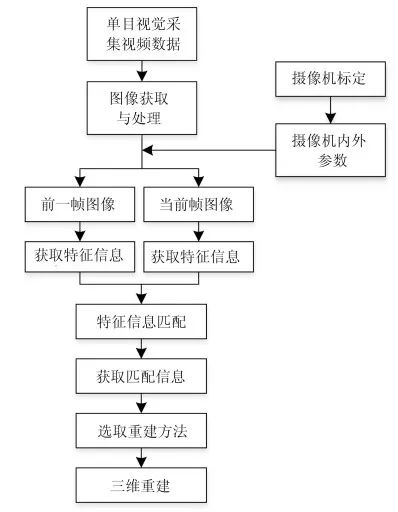
1.1 单目视觉法
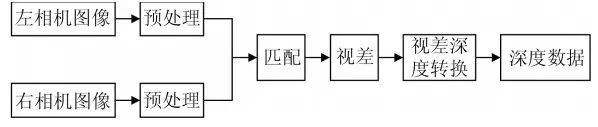
1.2 双目视觉法
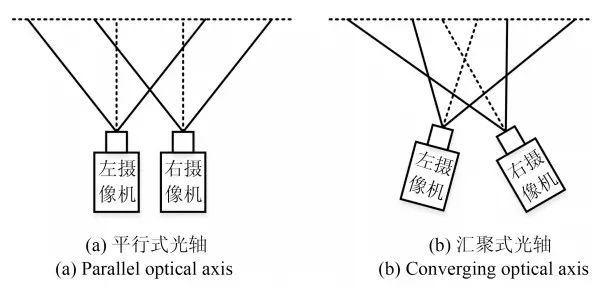
1) 平行式光轴双目视觉系统是比较理想的一种系统.在平行式光轴视觉系统中, 左右相机互相对齐, 它们的光轴也要互相平行, 形成一个共面的成像平面.由于左右相机只在轴上的位置不同, 而焦距等其他参数是相同的, 因此, 左右相机拍摄的同一物点所成的像分别在左右两图像上对应的对集线上, 可以较好的实现立体匹配。 2) 汇聚式光轴双目视觉系统是将平行式光轴双目视觉系统中的左右相机分别绕光心顺时针和逆时针旋转一定角度, 从而形成汇聚式双目视觉系统。
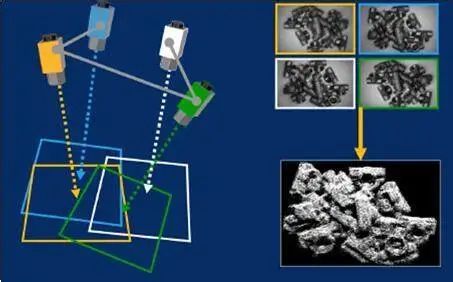
1.3 多目视觉法
2 根据匹配方法分类
2.1 区域视觉法
2.2 特征视觉法
3 根据应用方法分类
3.1 运动恢复结构法
3.2 机器学习法
1) 统计学习法:就是需要通过不断地学习再学习的过程.该方法是以大型数据库为基础, 例如, 人脸数据库、场景数据库等.首先, 这种方法需要对数据库中的每一个目标进行特征统计, 这些特征主要包括亮度、纹理、几何形状、深度等, 然后, 再对重建目标的各种特征建立概率函数, 最后, 计算重建目标与数据库中相似目标的概率大小, 取概率最大的目标深度为重建目标的深度, 再使用差值计算和纹理映射进行目标的三维重建。
2) 神经网络法:基于神经网络法的三维重建是利用神经网络具有较好的泛函逼近能力, 能够以任意的精度逼近任何非线性关系的优点来进行三维重建。
3) 深度学习与语义法:基于深度学习的三维重建最近几年取得了非常大进展, 是当前计算机视觉领域比较流行的方法之一。学习系统是由多层卷积层和多层全连接层组成的卷积神经网络(CNN)进行学习图像的层次化特征表示, 这种方法能够精确地重建出物体的几何形状。基于语义的三维重建可以运用在移动的行人或车辆等大的场景, 这种方法能够精确地对环境中的目标物体进行识别, 而深度学习技术也是最近几年刚刚兴起的比较有优势的识别方法, 因此, 深度学习和语义相结合的三维重建是未来几年的研究趋势, 也会受到该领域的研究者们广泛关注。
—版权声明—
仅用于学术分享,版权属于原作者。
若有侵权,请联系微信号:yiyang-sy 删除或修改!
评论