
视觉方案好几种,我为何更看好双目视觉
双目视觉技术的原理、结构、特点、发展现状和发展方向分析
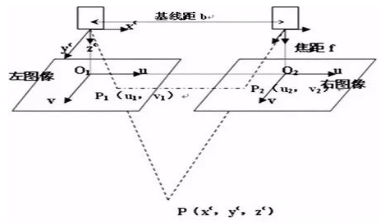
双目立体视觉是机器视觉的一种重要形式,它是基于视差原理并由多幅图像获取物体三维几何信息的方法。双目立体视觉系统一般由双摄像机从不同角度同时获得被测物的两幅数字图像,或由单摄像机在不同时刻从不同角度获得被测物的两幅数字图像,并基于视差原理恢复出物体的三维几何信息,重建物体三维轮廓及位置。双目立体视觉系统在机器视觉领域有着广泛的应用前景。
双目立体视觉技术的实现可分为以下步骤:图像获取、摄像机标定、特征提取、图像匹配和三维重建,国外双目体视目前主要应用于四个领域:机器人导航、微操作系统的参数检测、三维测量和虚拟现实,国内主要研究对多自由度机械装置的动态、精确位姿检测,对三维不规则物体(偏转线圈)的三维空间坐标进行非接触精密测量,全自主足球机器人导航等。
双目立体视觉这一有着广阔应用前景的学科,随着光学,电子学以及计算机技术的发展,将不断进步,逐渐实用化,不仅将成为工业检测,生物医学,虚拟现实等领域。
(资料来源:传感器技术、电子发烧友)
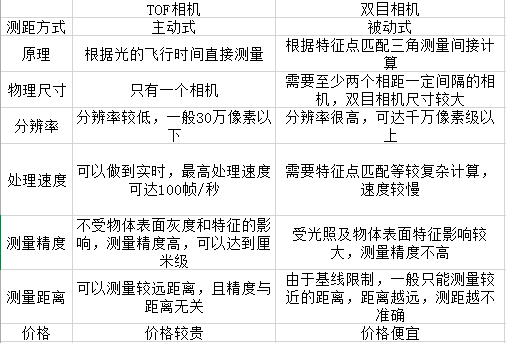
双目视觉与TOF的差异性分析
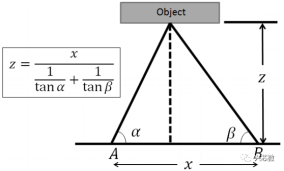
双目视觉:双目立体视觉测距的原理和人眼类似,通过计算空间中同一个物体在两个相机成像的视差就可以根据如下三角关系计算得到物体离相机的距离:
双目立体视觉测距算法的核心就是寻找对应关系,可以理解为给定一个相机拍摄的图片中的任意一个像素点,如何在另外一个相机拍摄的图像中找到和它对应的像素点,这个过程需要特征提取、特征匹配等一系列复杂的算法。
(资料来源:兴芯微)
双目视觉对目标物体的三维重建技术的应用
计算机视觉检测技术以其非接触、快速、高精度、自动化程度高等诸多优点,在工业生产中得到了越来越广泛的应用。已有的方法包括基于单摄像头结合结构光的方法、双目视觉方法、投影仪配合摄像机方法等。其中双目视觉因其结构灵活、安装方便、成本低而被广泛采用。
目视觉测量要解决的问题是如何通过两维CCD图像恢复出被测量的三维信息,摄像机标定与立体匹配是双目立体视觉系统中最重要也是最困难的问题。随着摄影测量和计算机视觉理论的发展,许多学者对摄像机标定技术进行了深入研究,现已发展的比较成熟;也有许多学者对立体匹配进行了大量的研究。提出了一种基于双目立体视觉的激光三维测量技术,采用了张正友平面模板标定法,系统标定不需昂贵的精制标定块;同时,利用标定结果对图像进行校正,并结合线结构激光条纹进行匹配点搜索,大大降低了双目立体视觉中立体匹配的难度。
激光结构光由于波长单一,抗电磁干扰能力强,检测精度高等优点,广泛应用于物体检测与跟踪,是主动视觉测量技术,双目立体视觉因为有快速,准确,灵活等特点,被广泛的应用于医疗,工业,人工智能等多个领域,尤其当工作的环境恶劣、条件艰苦(例如:高山地区的电力线监测,建筑施工工地的墙面抹灰,外太空导航等),或者要求长时间、稳定性强的工作(国防安全系统,医学成像等),双目立体视觉系统显现出来了无法比拟的优越性。双目立体视觉应用的部分领域包括:高山地区的电力线监测、房屋建造抹墙机器人、卫星遥感监测图像分析、医学成像分析、安全检测系统等。
双目立体视觉越来越多的被应用在我们的平常生活当中,例如,虚拟现实构造空间配合虚拟现实技术,双目立体视觉可以恢复出难以示众的物品,例如,文物,墨宝等高价值易破损的物品。从而可以建造出虚拟文化馆。
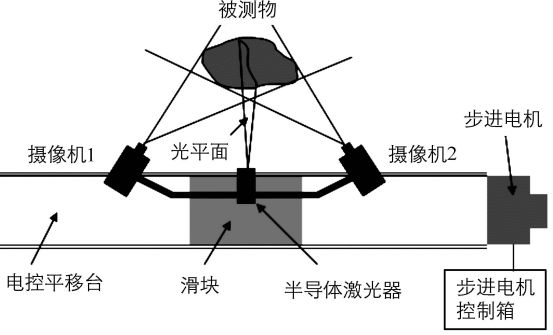
为实现工业中汽车、飞机、骨骼和模具外形等物体的三维重建,介绍了基于激光线扫描的双目立体视觉三维测量系统。2个摄像机同时摄取一个扫描激光光条图像,经过图像预处理、光条特征点提取、图像匹配,利用视差计算出光条上所有点的坐标值,即光条处物体的三维信息。通过坐标系之间的转换把各光条统一到同一世界坐标系下,得到整个物体的三维重建。三维激光扫描测量系统如下图所示,硬件部分包括双CCD摄像机,半导体激光器,电控平移台以及步进电机控制箱。
(资料来源:电子发烧友、YXQ)
双目视觉落地应用场景案例
(1)高精度导航定位、全局环境语义,双目视觉导航方案更适合扫地机器人
随着社会经济发展水平和人们消费观念的转变,更具科技属性的智能规划型扫地机器人成为最受费者青睐的智能家居产品。据数据显示,智能规划扫地机器人市场占比从17年的10%提升到18年的59%,其中激光导航占76%,视觉导航系统占24%。而随着视觉导航系统在iRobot、戴森等扫地机器人头部阵营不断发酵,关于视觉导航单目、双目的技术问题,也得到了扫地机器人厂商的广泛关注。

双目视觉导航是定位精度更高、系统性更强,更加智能的扫地机器人导航方案,能够更好地引领扫地机器人向家庭清洁智能助手转变,随着技术的不断进步,可以预见,双目视觉导航系统将会逐渐成为扫地机器人主流导航定位方案。
(2)200帧高速采集,INDEMIND双目视觉惯性模组助力立体视觉应用升级
面对日益提升的使用需求,为提升产品适用性,INDEMIND深耕不辍,为旗下双目视觉惯性模组提供了200帧高速环境获取能力,满足了不同场景的使用需求。

以车道检测为例,在车道检测环节中,视觉需对道路弯曲、阴影、路面变化、标识线变化等路况实时反馈分析,并通过深度学习算法,自动生成车辆最佳行驶路线。而想要实现快速机动反应,便需要高速的环境采集能力,INDEMIND双目视觉惯性模组的图像采集帧率可达到200帧,在遇到车道变化时,双目视觉惯性模组可以0.005秒/帧的速度快速检测车道变化,并通过连续多帧分析车道变化趋势,为自动驾驶算法提供多方面精准、快速的环境信息数据,辅助算法实现高机动自动驾驶。
(资料来源:电子发烧友、双目立体视觉)
(3)双目视觉项目在汽车领域的产品落地化
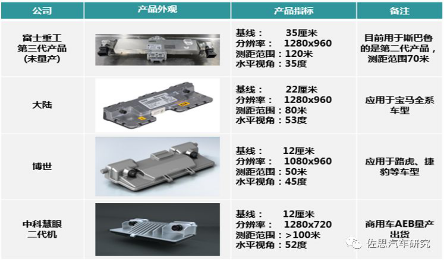
双目视觉其实在很早的时候就在欧美以及日本,都运用在车载上了。从1999年开始,斯巴鲁就已经搭载了最早的一个双目相机,当时是日立给它做的。到2016年的时候,宝马、奔驰、捷豹路虎都在他们最高配的车型上搭载了双目视觉。从2016年到现在,双目立体视觉的发展趋势是从顶配的高端车型慢慢向中端甚至低端的车型覆盖。这里面说明两个问题,第一是大家对主动安全的意识有提升,第二是在车载视觉传感器的领域,大家开始慢慢接受双目的传感器。
目前博世、大陆、日立、奥托立夫、电装这些大企业都在研发、采用,以及加快脚步推行他们的双目视觉产品。
(资料来源:佐思汽车研究)
双目视觉芯片发展的必要性和市场前景
(1)受益于配套基础设施不断完善、制造业总体规模持续扩大、智能化水平不断提高、政策利好等因素,中国机器视觉市场需求不断增长。据数据显示,2018年中国机器视觉市场规模首次超过100亿元。随着行业技术提升、产品应用领域更广泛,未来机器视觉市场将进一步扩大,预计2019年市场规模将近125亿元。
(2)市场空间巨大:据数据显示,2018年全球机器视觉市场规模超88亿美元。随着应用市场的进一步扩大,未来市场需求将进一步放量。预计2019年,全球机器视觉市场规模将近100亿美元。面对如此巨大的市场,并且核心的硬件芯片占了整套视觉系统大概35%的成本的情形下,半导体行业各个大公司都对此领域虎视眈眈。但是因其技术壁垒较高,需要有成熟的图像算法方面积累,半导体公司也不敢贸然进入。
(3)双目视觉芯片是趋势:图像处理算法一开始应用是采用服务器的软件算法来完成,随着互联网技术的不断成熟,会扩展到云端计算来完成,但是这样对于网络带宽要求非常大,对于云服务器的计算量要求也非常高。视频图像处理技术算法的大规模产业化应用,必然是需要专业的芯片来完成,该芯片就是机器视觉(CV)芯片。芯片是能够降低成本,同时提高运算能力的方式,从近年的整个行业情况来看,计算机视觉作为人工智能领域最重要的方向之一。
(4)机器视觉是强需求:在当今这个时代,计算机视觉领域呈现出很多新的趋势,其中最为显著的一个,就是应用的爆炸性增长。除了手机、个人电脑和工业检测之外,计算机视觉技术在智能安防、机器人、自动驾驶、智慧医疗、无人机、增强现实(AR)等领域都出现了各种形态的应用方式,计算机视觉迎来了一个应用爆炸性增长的时代。
来源:江苏华睿投资
 End
End
声明:部分内容来源于网络,仅供读者学术交流之目的。文章版权归原作者所有。如有不妥,请联系删除。