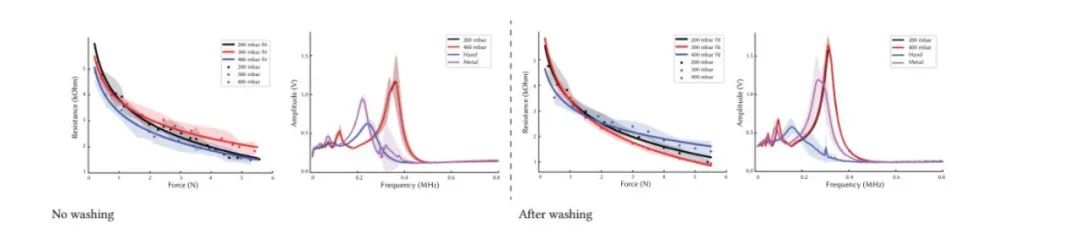
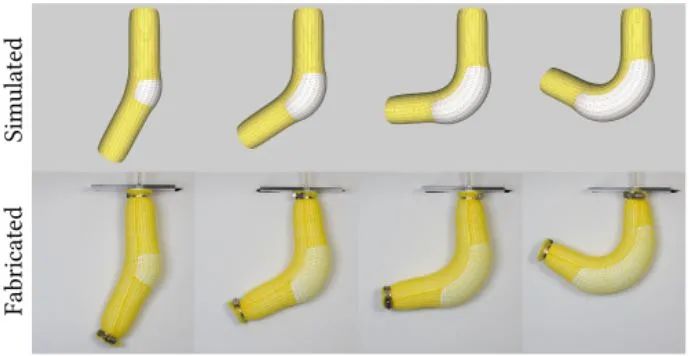
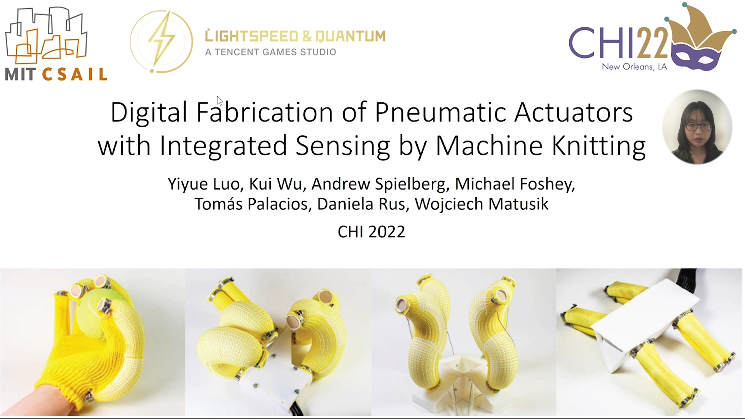
MIT的黑科技“香蕉”软体机器人,给橡胶管穿上导电毛衣拥有触觉!大数据文摘关注共 1382字,需浏览 3分钟 ·2022-06-20 22:54 大数据文摘授权转载自机器人大讲堂给橡胶管穿上黄色毛衣,它就能变成一只神奇的外骨骼手套:看起来像不像一串香蕉,这是来自MIT的黑科技“香蕉”,具有传感功能,可以自动控制“力道”。单根“香蕉”还可以帮助手肘、膝盖恢复功能:麻省理工学院(MIT)计算机科学和人工智能实验室 (CSAIL)团队开发的这款软体机器人,名为“PneuAct”,由气动驱动,灵活性超强,不仅速度快、数字化,还能实现触觉感知!玩法众多,摇身一变就成了四足机器人:想怎么玩,就看你脑洞够不够大!织一件“导电”毛衣,有触觉还不怕水“香蕉”身上的黄色毛衣是腈纶线和一种特定的导电纱线编织而成,当注入气压时,编织物可以限制硅胶管的膨胀,从而让机器人按照预定的方式变形。这种导电纱线使机器人具有一种内置的触摸感,包含两种传感方式:电阻压力传感和电容感应;当香蕉手指抓握物体时,电阻压力传感器能感应到物体上施加了多少力、抓取是否成功。电容感应可以让机器人感受到人类的触摸:气动控制系统包含16 个单独的阀门,当“香蕉”感受到外界刺激,系统通过命令指定的目标压力序列来泵入空气。每根手指都可以通过气动阀系统单独处理,实现各种手部姿势,并抓取具有不同形状、纹理和重量的物体。外骨骼手套可供人类佩戴以补充手指肌肉运动,最大限度地减少完成任务和动作所需的肌肉活动量,对于那些手指受伤、行动不便或其他创伤的人来说,这具有很大的潜力。香蕉还可充当四足机器人的腿,每条腿由三个致动器组成,可以前后反向弯曲,还可以垂直向上转动:“香蕉”的耐用性也是杠杠的,不用担心断线或者破损,而且不怕水,在极限气压下进行了100次的充气/放气测试,还用温水洗涤再烘干,都没有对机器人的性能产生影响。洗涤烘干后的传感器幅度响应交互式设计系统,一键解决软体驱动器制造难题让橡胶管、“毛衣”和气体驱动完美的配合起来,其实不是件容易的事儿。针织物限制硅胶管膨胀,这个原理很简单,但不同的编织方式产生的效果截然不同,如何快速有效的构建合适的编织方法一直是该领域的难题。CSAIL团队构建了一种集成了传感功能的交互式设计系统,能够快速设计并预览充气后的变形结果,还能够自由指定弹性缝线、压力传感器和俘获传感器的位置,再将设计转换为工业针织机的代码指令,直接进行编织制造。“我们只需在软件中指定针脚和传感器的设计模式,就可以对机器人的运动方式进行编程,然后就可以在打印前进行模拟”, CSAIL团队表示,“纺织毛衣由针织机制造,可以固定在一个廉价的、现成的橡胶硅胶管上,以完成执行器。”该文章发表在2022 ACM CHI(计算系统人类因素会议)中,是人机交互领域最重要的国际会议,标题为“Digital Fabrication of Pneumatic Actuators with Integrated Sensing by Machine Knitting”。目前该系统仅限于管形执行器的自动设计与制造,因为所使用的V 型床针织机只能沿一个特定方向进行编织,这限制了机器人的自由度,后续,研究人员计划进一步探索不同形状的执行器,以避免受到单一结构的限制。另外,他们还将扩展该系统以结合任务驱动、基于优化的设计,用户可以指定目标姿势和可以自动合成的最佳编织图案。点「在看」的人都变好看了哦! 浏览 16点赞 评论 收藏 分享 手机扫一扫分享分享 举报 评论图片表情视频评价全部评论推荐 给 React 穿上美丽的‘嫁衣’勾勾的前端世界0机器人大牛 Daniela Rus 领衔!MIT 新算法实现软体机器人「本体感知」雷锋网0手把手教你制作一个软体机器人大数据DT0基于视触觉传感器的机器人推动物体学习新机器视觉0Celestic天文软体Celestia是一套开放原始码的天文软体,利用NVIDIA加速元件处理高解析度的材质与纹理贴图,流畅地显示高解析度影像。Celestia能存取NASA影像资料库中的星球与星系目录,让您能看到“飞越”Gnumeric报表软体Gnumeric是一个好用的报表软体,只要您会用Excel便会使用本软体,操作方式简直跟Excel一模一样。本软体为了跟各个有名的报表软体相容,更提供了可以开启Excel、Lotus1-2-3、AppAres GalaxyP2P软体Ares Galaxy是一套专门用来分享档案的P2P软体,功能特色有:1. GPL授权,SourceGnumeric报表软体Gnumeric 是一个好用的报表软体,只要您会用Excel 便会使用本软体,操作方式简直跟Exce机器人用上AI后,拥有了堪比人类皮肤的触觉:轻松引线穿针、夹取鸡蛋丨Science子刊极客挖掘机0基于视觉的触觉传感器:DIGIT新机器视觉0点赞 评论 收藏 分享 手机扫一扫分享分享 举报





 下载APP
下载APP