
基于视觉的触觉传感器:DIGIT
技术来自于点击下方卡片,关注“新机器视觉”公众号
视觉/图像重磅干货,第一时间送达
论文标题:DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
IEEE ROBOTICS AND AUTOMATION LETTERS. PREPRINT VERSION. ACCEPTED JANUARY, 2020
01
—
引言介绍
现代化发展的需要使得各类机器人深入到人类的日常生活之中。当前大多数机器人能在特定的场景中,针对特定的任务执行较为简单的工作。然而,在现实生活机器人应用的环境和条件是会动态变化的,为了使机器人能适应不同的工作环境,机器人应当具备更为敏感精确的感知能力。另一方面,当前机器人仍远未达到如同人类一般的操作水准,甚至就连简单的抓取动作都不能很好的完成,很大程度上在于目前传感器灵敏度的局限性。
力对于人与机器人来说都是一个十分重要的概念。人们能通过对力的感知,来完成与自然界各种事物的互动。越是精细的操作,越是体现了人对力把控的精确性。不同于其他感知类型,人类对于力的感知基本上都是通过皮肤接触。接触是一种十分重要的感知手段,他为人提供了一种最为自然、直接的测力方式。近年来各类科研人员针对触觉感知进行了各类研究,并就如何结合触觉来提升机器人控制领域的灵敏性做出了极大努力。虽然现存的触觉传感器种类繁多,但仍存在极大的瓶颈,以至于无法广泛使用。主要需求有以下几点:高分辨率、高灵敏度、稳定且易于使用、价格低廉以及高集成度。
为了更好的满足上述需求,Facebook于2021年11月发布了一款命名为DIGIT的基于视觉的触觉传感器。相比于其他同类传感器,DIGIT具有如下优点:1)体积小巧且模块化,可做到即插即用。2)可大规模制造。3)稳定可靠,寿命长。此外,DIGIT还保留了同类传感器的诸多优点。
02
—
传感器结构
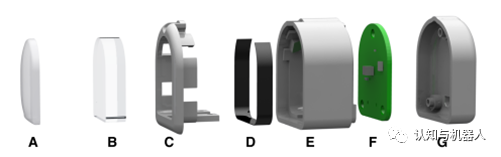
图1 DIGIT基本构成
03
—
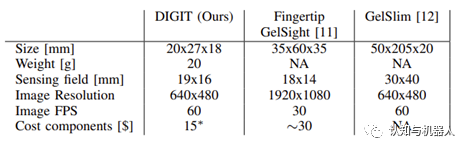
传感器特点
表1 三类传感器的参数比较
04
—
性能测试

图2 不同物体的测结果图
04
—
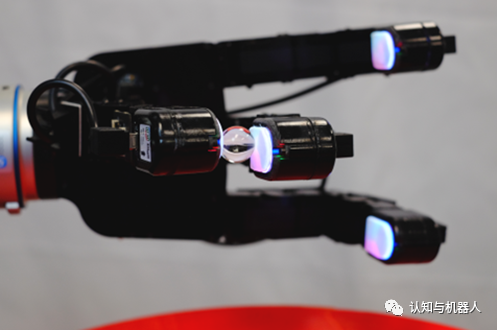
案例展示
05
—
总结