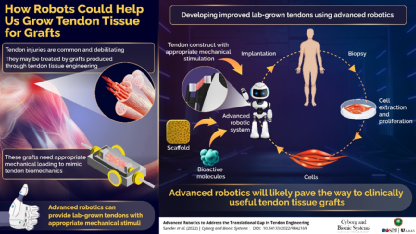
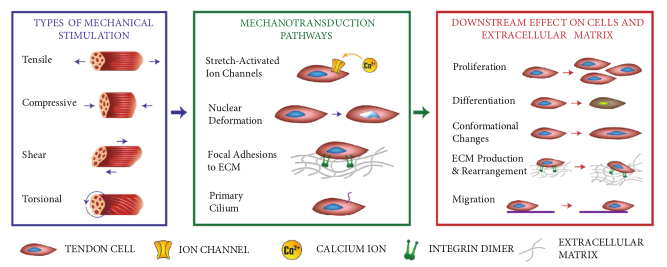
当前,设计制造出医学专用的人造肌腱组织,可以为肌腱移植手术提供一种可行性方案。一般而言,为了更好的设计人造肌腱,在实验阶段需要对人造肌腱组织进行机械特性实验来模拟其在人体内的受力情况。 因此,在实验阶段需要额外的驱动器来对人造肌腱来进行多种激励,通过观察肌腱组织的响应从而更好的设计肌腱,而肌腱生物反应器刚好充当了这个角色。 值得注意的是,人体的激励多种多样。但传统的肌腱生物反应器仅能输出拉伸方向的单自由度激励,这和人体真实情况存在较大差别,而这种性能欠缺的实验设备给人造肌腱的从设计到落地应用带来困难。 针对这一难题,来自牛津大学的研究团队提出可以使用软体机器人和类人肌肉骨骼机器人作为新型的生物反应器平台,凭借软体机器人可实现多自由度驱动,而且其结构类似于人体肌肉的结构优势,该方案具备一定前瞻性。 这项研究以论文Advanced Robotics to Address the Translational Gap in Tendon Engineering为题发表于中国科技期刊卓越行动计划高起点新刊Cyborg and Bionic Systems(类生命系统)上。 论文地址:https://spj.sciencemag.org/journals/cbsystems/2022/9842169/ 文初,研发团队回顾了当前的肌腱组织工程发展,并指出传统的生物反应器存在输出单一,无法模拟人体肌肉的问题。 针对于此,研发团队提出可以利用肌肉骨骼机器人和软体机器人系统作为试验平台,开展相关研究解决肌腱工程面临的发展瓶颈。 图.肌腱组织工程发展趋势
“越来越多的研究团队表示可以将先进的机器人技术与活细胞和组织一起用于生物工程和组织工程应用。我们现在处于一个激动人心的阶段,我们可以探索将这些技术融入组织工程的各种可能性。” 牛津大学研究人员Pierre Alexis Mouthuy表示。 但这项新的肌腱工程需要还面临许多挑战。 除了将要采用文中的多自由度软体激励作为新的生物反应平台外,也需要寻找能够 3D 图像中的应力的方法。 此外,合理的价格是这类型机器人可以广泛应用的先决条件。 最后,从长远来看,先进机器人技术可以为减少患者数量改善个人的生活质量,通过减少手术的次数来提高生产力和降低医疗保健成本来促进经济发展。 随着软体机器人在材料、驱动方式、建模理论、控制方法等方面的不断创新、完善和发展,软体机器人终究能达到临床应用标准,在医学领域的应用也会更广泛。软体机器人与传统刚性机器人共同协作可为医学治疗提供更多解决方案,提高医疗效率。 论文引用信息:Iain L. Sander, Nicole Dvorak, Julie A. Stebbins, Andrew J. Carr, Pierre-Alexis Mouthuy, "Advanced Robotics to Address the Translational Gap in Tendon Engineering", Cyborg and Bionic Systems, vol. 2022, Article ID 9842169, 18 pages, 2022. https://doi.org/10.34133/2022/9842169


 下载APP
下载APP