
机器视觉进行精密测量影响精度的因素有哪些?
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

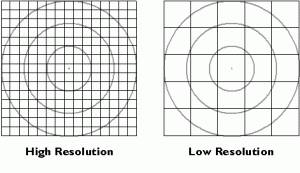
在机器视觉测量中提供高精度和低不确定度的决定性因素是获取的图像的分辨率。在这种情况下,术语分辨率 (或图像分辨率)意味着以实际单位的单个像素的大小。简而言之,如果一个摄像机传感器在水平方向上包含1000个像素,并且采用光学器件来获取覆盖真实世界场景中1英寸宽的区域的图像,则单个像素将代表0.001“。请注意,这是相机制造商或分析软件不会改变的基本指标。
作为一种衡量标准,机器视觉系统中最小的测量单位(稍后提到的一些例外情况)就是单个像素。与任何测量系统一样,为了进行可重复和可靠的测量,必须使用最小测量单位(作为一般经验法则)为所需测量公差带的十分之一的测量仪。在刚描述的例子中,可以估计系统提供大约+/- 0.005“的精确度测量(0.01”的公差带,十倍仪表单位)。
工程师首先使用机器视觉进行测量往往严重低估了达到理想水平的测量精度不确定性所需的像素数量。事实上,它可能需要多台摄像机,专业摄像机(如线扫描成像仪)或单个部件的多个视图来达到指定检测容差所需的分辨率。
有时候,我们可以用数学方法在成像系统中挤出额外的分辨率,使用算法来报告亚像素重复性的特征。一些例子是灰度边缘分析,几何或相关搜索,圆形或线条拟合等回归,以及某些情况下的连通性。如果可以通过使用这些工具来考虑子像素结果,则如前所述,最小的测量单位可以小于单个像素。请注意,由供应商提供的子像素能力估计值只是这个估计值,通常用于最好的成像,光学和部件表示。请谨慎使用任意子像素期望值作为指定系统测量功能的决定性因素。用实际零件和图像测试系统,以经验确定子像素的能力。
成像是光学和照明的功能(我们将在后面讨论,部分介绍)。对于大多数应用,所使用的唯一光学器件将是透镜组件,但是选择该透镜对于度量应用是至关重要的。除了向传感器提供适当的真实世界尺寸的图像之外,为了计量,镜头必须尽可能精确地再现图像而不失真。此外,镜头也具有分辨率度量标准,其通常被指定为每mm或者每英寸的线对(lp / mm,lp / in),并且通过扩展可以具有用于MTF(调制转换函数)的规格或者更简单地具有能力在高lp / mm的情况下产生高对比度的镜头。像素数越高,这些镜头指标越重要。确保指定的光学元件是为机器视觉应用设计的高质量,高分辨率产品。
远心镜头在许多情况下对测量应用非常有用。远心镜头使用光学组合来实际消除由图像中的视差引起的所有失真。其结果是几乎所有图像都与传感器平行的图像。平面几何关系(在图像平面中)完全保留,使测量更加直接和直接。一如既往,在规范之前测试成像。
对于需要非常小视场(例如小于几毫米)的应用,请考虑使用专门为机器视觉制造的显微镜光学元件和/或高倍率光学元件。这些可从许多供应商处获得。不建议使用扩展器或附加放大倍率将标准光学元件推至更高倍率。
在计量学中,照明的选择可能起关键作用。不幸的是,没有具体的规则可以应用于照明。尽管在生产线上实现自动化背光的物理实现可能是一个挑战,但许多计量应用都受益于背光照明(如下所述,部分展示)。正面照明可能会突出显示必须标识以进行测量的特征边缘。考虑使用低角度或结构化的照明来突出低对比度的特点。当试图测量非常小的特征(例如分辨率低于0.001mm)时,可以使用长波长的颜色,例如蓝色或紫色来提高对比度。如果零件处于运动状态(即使不是),请考虑使LED照明器频闪以获得最佳强度和灯泡寿命。
在所有情况下,成功的机器视觉照明都需要在实验室和地板上进行实验,以确保选择正确的组件。
给定特定照明技术的照相机的光学系统可见的特征通常不具有用于机器视觉工具的相同特征,可以在零件印刷上指定或使用手动测量仪来测量。例如,测量直径较小但相当深的通孔的直径 - 高精度和低不确定性。如果使用前部照明,则只会测量孔的顶部边缘。如果期望的检查是模仿插入量规,这可能是不可接受的。另一方面,如果使用背光,由于孔的深度,光学器件不可能“平均”图像中的整个孔。更有可能的是,光学器件将集中在钻孔顶部,底部,中部的某一深度处,并且这个结果可能不是所期望的。仔细选择照明,光学和算法,以确保测量商定的表面。了解在许多情况下,出于上述原因,在线非接触机器视觉测量不会完全重复物理测量设备。
被检测的部件必须重复呈现。在离线设置中,成像,光学,分辨率和算法可能都是完美的,但是您发现在线测量的可重复性和可靠性很差。通常情况下,部分呈现不一致。有时候,部分演示甚至可能无法实现某种度量。以例如前面描述的小而深的钻孔为例。当该孔的表面垂直于透镜时,图像直接从孔的深处取下,可以成功测量。但是,如果零件稍微倾斜,那么这样的孔可以明显地变成椭圆形,或者如果是背光,则会被完全遮蔽。对于非接触式测量的成像,首先必须减轻所有可能的零件表示变化,然后理解在任何情况下,零件表示都将对测量中的一些叠加误差负责。在确定和指定分辨率,光学和照明时考虑到这一点。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~