
知名企业家车祸身亡,惨痛!自动驾驶?
前天,看到了一则新闻:
上善若水投资管理公司创始人、意统天下餐饮管理公司创始人、美一好品牌管理公司创始人林文钦先生,驾驶蔚来 ES8 汽车启用自动驾驶功能(NOP 领航状态)后,在沈海高速涵江段发生交通事故,不幸逝世,终年31岁。

而这已经不是第一次的致死事故了,就在两个星期前,上海浦东新区一辆蔚来 EC6 在高速上撞到石墩后,燃起烈火。

驾驶员未能及时逃脱,不幸遇难。
特斯拉的刹车事故,上了好几次热搜,蔚来汽车的两起致死事件,却很少有人提及。
曾以自动驾驶做宣传,却没有做好安全教育。
不谈企业层面的问题,身为程序员,新生代农民工,从技术角度,简单聊聊自动驾驶的安全性。
先说结论:以目前的技术来看,自动驾驶,做不到绝对安全, 只能当作辅助驾驶。
写过代码的,都知道,是程序就可能会有 bug,我是真不太敢将自己的性命交给自己写的代码。
放在自动驾驶里,这得是多少血的教训啊。
电脑软件、手机软件出 bug,不至于要了身家性命,但自动驾驶但凡来个小 bug,都可能是要出人命的。
所以,很多做自动驾驶的公司,都一直在做道路测试,希望可以尽早发现并解决一些潜在的问题。
但百密也有一疏。
况且目前的技术本身,就存在瓶颈。
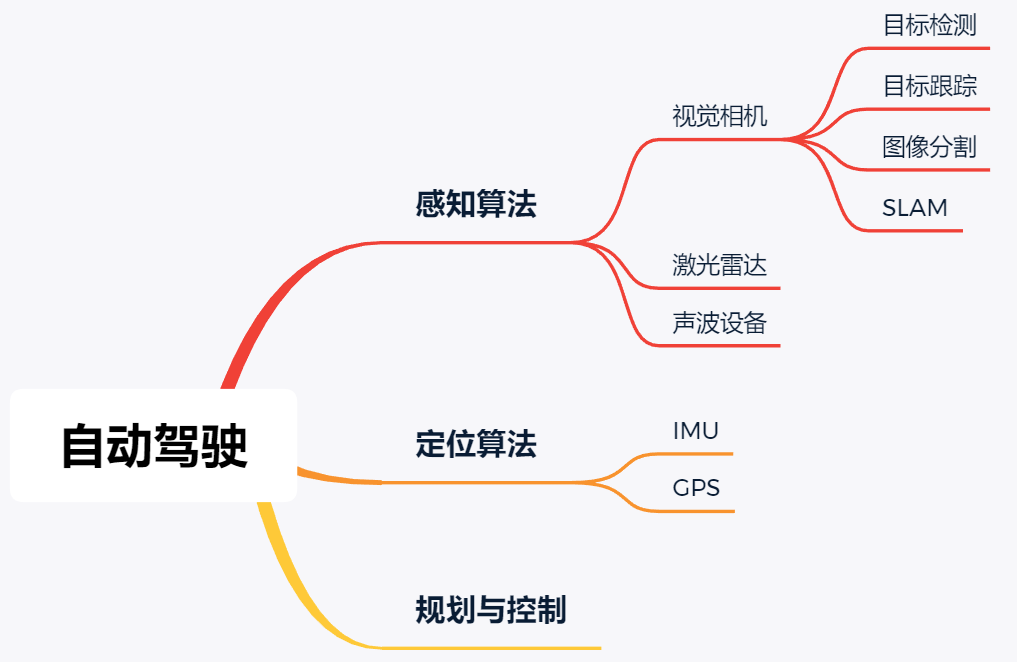
自动驾驶,可以大致分为感知算法、定位算法、规划与控制。
感知算法,定位算法,是为自动驾驶的规划与控制服务的,系统预测环境元素的移动轨迹,以此做出决策,实时控制车辆的运动。
可想而知,感知算法的可靠性,影响着自动驾驶车辆的安全性。
感知算法相当于人的“五官”,是对周围环境的感知能力。

主要用的就是视觉传感器、激光雷达、声波设备等相结合的方式。
视觉传感器里应用较多的算法就是车道线检测,目标检测,目标跟踪,以及图像分割了。
车道线检测,顾名思义,负责检测道路上的车道线,什么单黄线,双黄线,虚线,虚实线等。
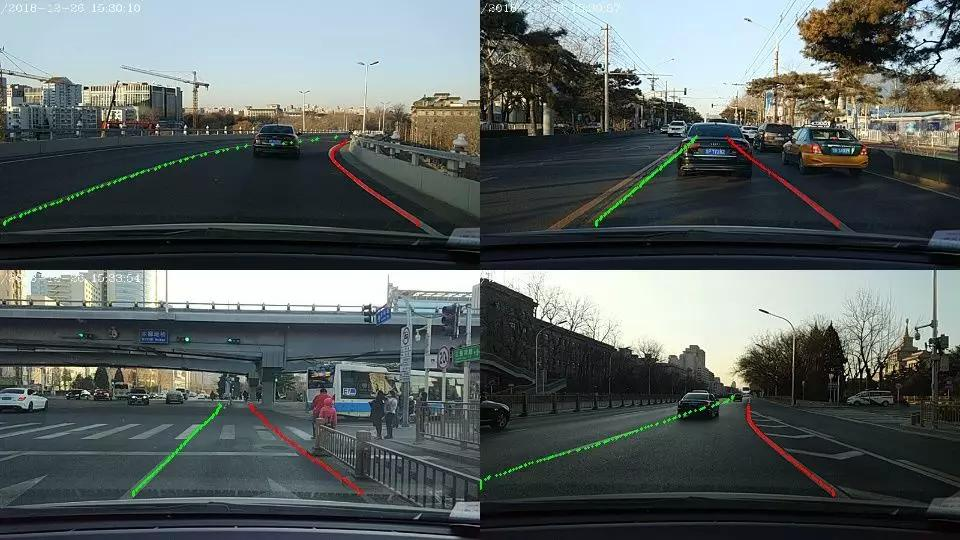
目标检测和目标跟踪,负责检测和跟踪,运动中的车辆,行人,动物,以及一些障碍物等。

图像分割,也是类似,辅助识别道路、行人和汽车等。

为了提高可靠性,除了这些常规算法,还会融合激光雷达、毫米波雷达等传感器数据。
例如:
毫米波雷达 + 摄像头数据融合。 激光雷达数据 + 摄像头数据融合。
学过机器学习的都知道,这些算法,都是讲概率的。
实际场景中,很多算法能做到 99% 的准确率,都算超高了。
就算融合各种雷达传感器,想做到 99.999% 都算天花板了。
100% 的准确率,不太现实。
因为自动驾驶的场景太复杂,做不到 100%,总会有识别错误的情况。
召回率也是同理,总会有漏检。
据网友分析:蔚来汽车这次事件,就有可能存在漏检问题。
从网络上流传的现场图来看,这辆 ES8 先撞上了路边的桩桶,随后高速撞击快车道上的一辆高速公路养护车,巨大的冲击力还导致公路养护车侧翻。

没识别出桩桶,撞了上去,速度再快些,结果可想而知。
不过这也都是网友的分析,具体的原因,等待官方的结果吧。
总之,以目前技术来讲,自动驾驶的可靠性有待提高。
而对于自动驾驶,感知算法虽有瓶颈,但不是最难的点,更难的地方在于决策,也就是规划与控制,让程序像人一样的去决策。
自动驾驶还有很长的一段路要走,不是做技术的,很难了解到这些,以至于盲目信任。
前华为智能驾驶总裁苏箐说过一句大实话:“普通用户对新科技产品有一种倾向——一开始完全不信任,但一旦他试过,他觉得很好的,就会变得非常非常信任,这个时候就是出事故的开始。”
在安全教育上,车企有责任做好宣传,毕竟关乎人命。
说了这么多,惋惜一次次用人的生命换来的教训的同时,也是希望我们国家的车企也好,自动驾驶技术也罢,都可以发展的更好。
同时,希望关注这些技术带给我们便利的,好的一面的同时,也希望更多人重视、关注到这样的安全问题。
