
高定位精度的交通标志识别----开源了
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

本文转自:AI算法与图像处理
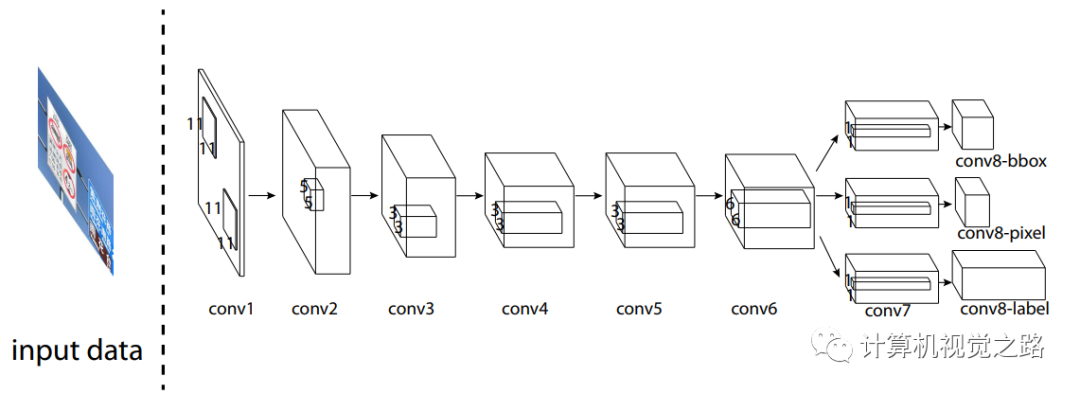
方法简介
代码下载与使用
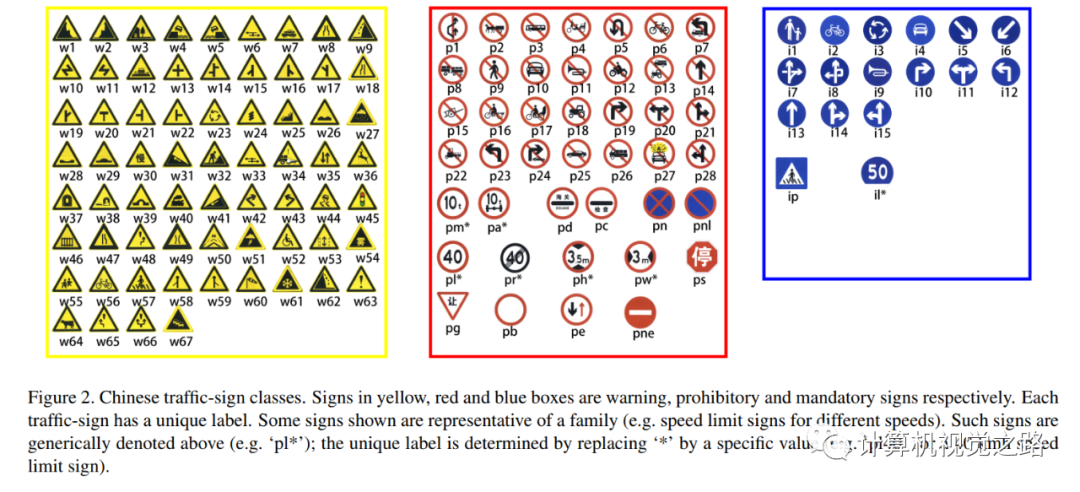
数据库下载与简介
总结

caffe: caffe代码 model: 模型相关文件 script: 训练模型、准备数据相关脚本 python: 模型、数据显示相关程序 anno_func.py: 简单的功能函数 data_show.ipynb: 图像显示的方法 deployer.ipynb: 模型测试流程 eval_check.ipynb: 模型评估
train:所有训练图 test: 所有测试图 other: 从训练集和测试集排除的图 marks: 用于做数据增强的标准图 annotations.json: 图片标注文件
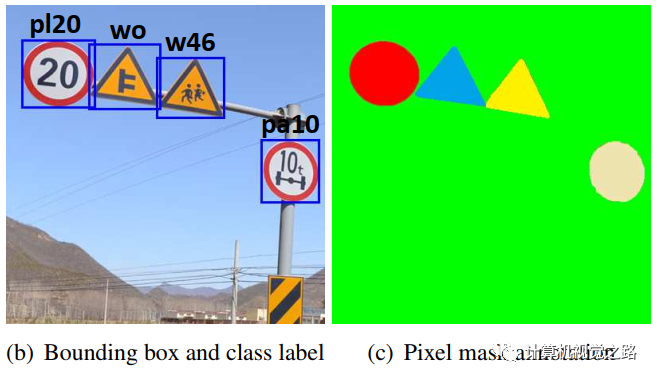
path: 图像相对路径
objects:[], 图像中的所有目标
category: 目标类别.
bbox: {xmin,ymin,xmax,ymax:float}, 目标框
ellipse_org: [[x1,y1],[x2,y2],...], 非必须, 椭圆的标注点
ellipse: [[x_o,y_o],[r_l,r_s],angle], 非必须, 根据椭圆标注点拟合的椭圆,[x_o,y_o] 是椭圆圆心, [r_l,r_s]是椭圆长短轴, angle椭圆旋转角.
polygon: [[x1,y1],[x2,y2],...], 非必须, 三角形的标注点
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
评论