特斯拉自研超级计算机Dojo!将取代日本「富岳」成全球第一
极市导读
马斯克即将又要创造一项新的纪录,特斯拉的「Dojo」即将取代日本的「富岳」,成为全球最快的超级计算机。 >>加入极市CV技术交流群,走在计算机视觉的最前沿
作为一家汽车生产商、自动驾驶公司以及电池及储能公司,特斯拉昨天正式宣布要与Intel、AMD以及NVIDIA厮杀:正式推出了自研的超级计算机群。
这套超算平台将要用于特斯拉自动驾驶神经网络的训练。
显然,网友们对特斯拉用这个超算来训练自动驾驶这件事充满了「疑惑」。
「哇,虽然根本不想问这个残酷的问题:特斯拉的自动驾驶不是在去年就实现了么,为什么还需要这个?」
特斯拉搞超算做什么?
在昨天的CVPR自动驾驶工作坊的演讲中,特斯拉的AI带头人,高级工程师Karpathy介绍了特斯拉超级计算机的基本情况。
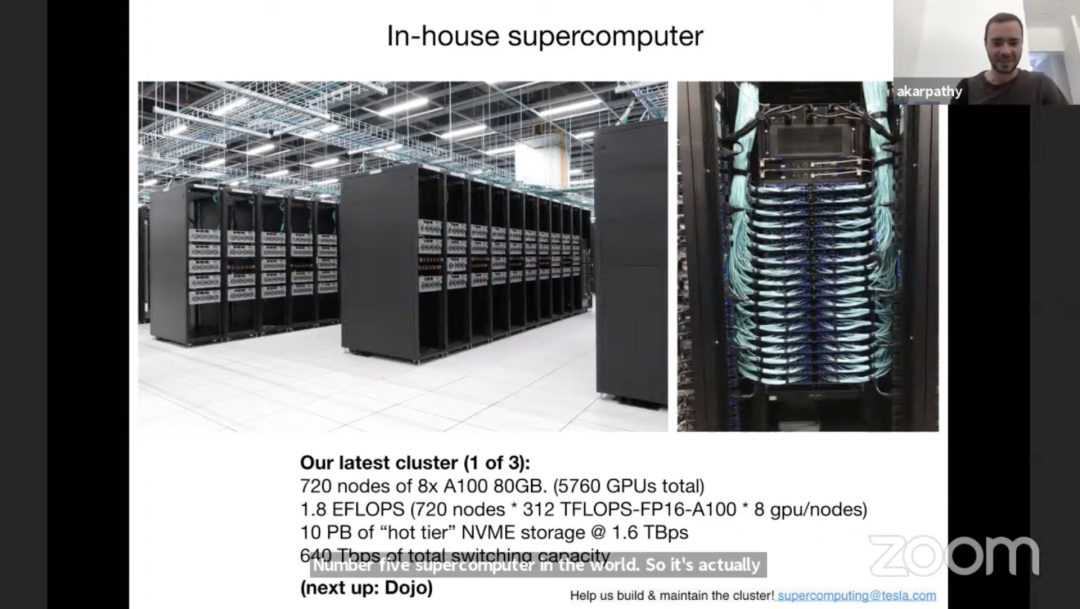
这台计算机群采用了5760个算力为321TFLOPS的英伟达A100显卡,组成了720个节点,总算力突破了1.8EFLOPS,10PB的存储空间(读写速度为1.6TBps)。
根据计算能力来看,这台超级计算机排名世界第五。
不仅如此,特斯拉表示,不排除给其他公司提供超级计算机集群的可能性。
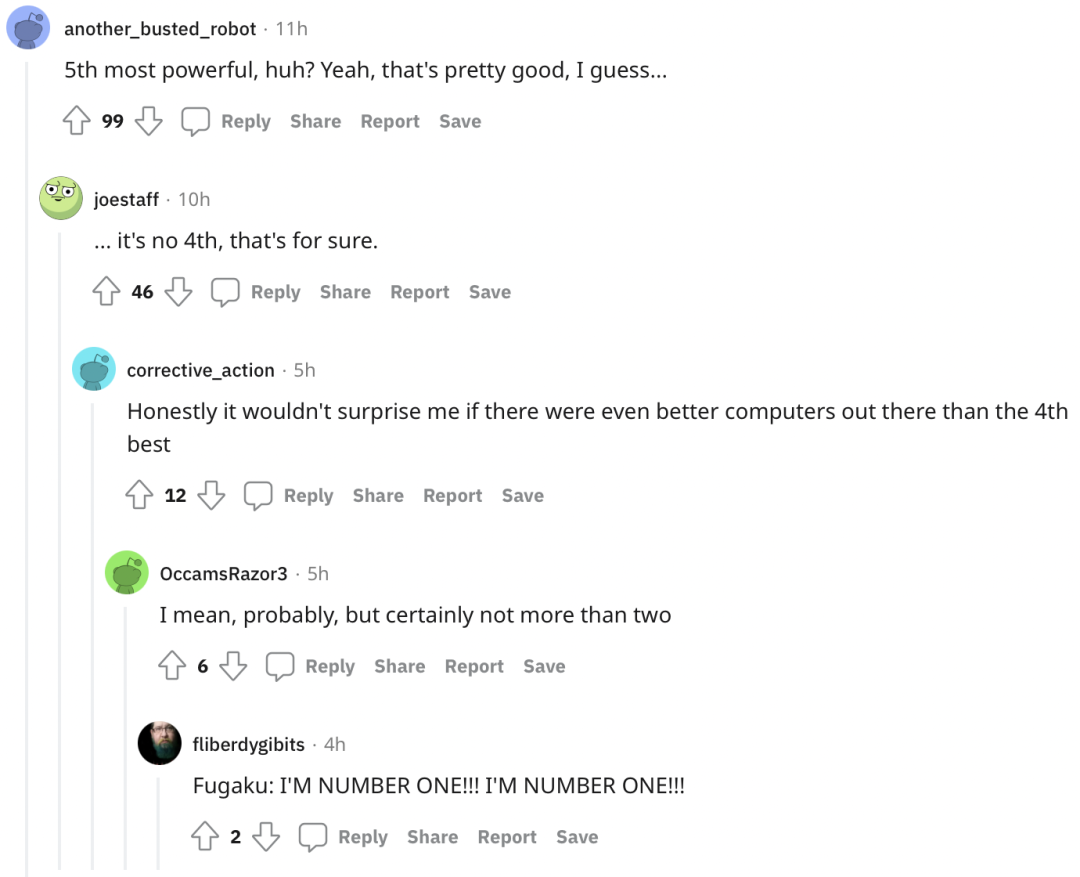
粉丝看到后非常激动,表示如果特斯拉是第五,那么肯定没有第四。于是后面这位老哥看不下去了:「富岳:我是第一!」。
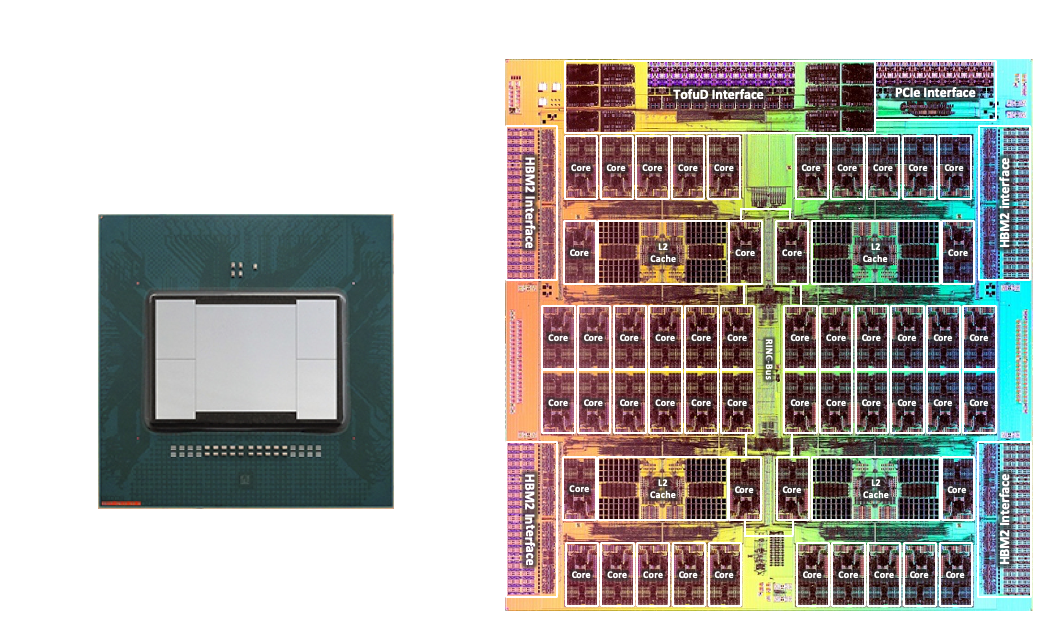
是的,目前排名第一的超算是日本的「富岳」,在机器学习应用上的算力超频之后是2.15EFLOPS,默频是1.95EFLOPS。

与使用显卡的超算不同,「富岳」使用的是基于ARM架构的A64FX处理器。
「肉」脑驾驶员不行,还是得上「硅」脑
「肉」脑驾驶员不行,还是得上「硅」脑
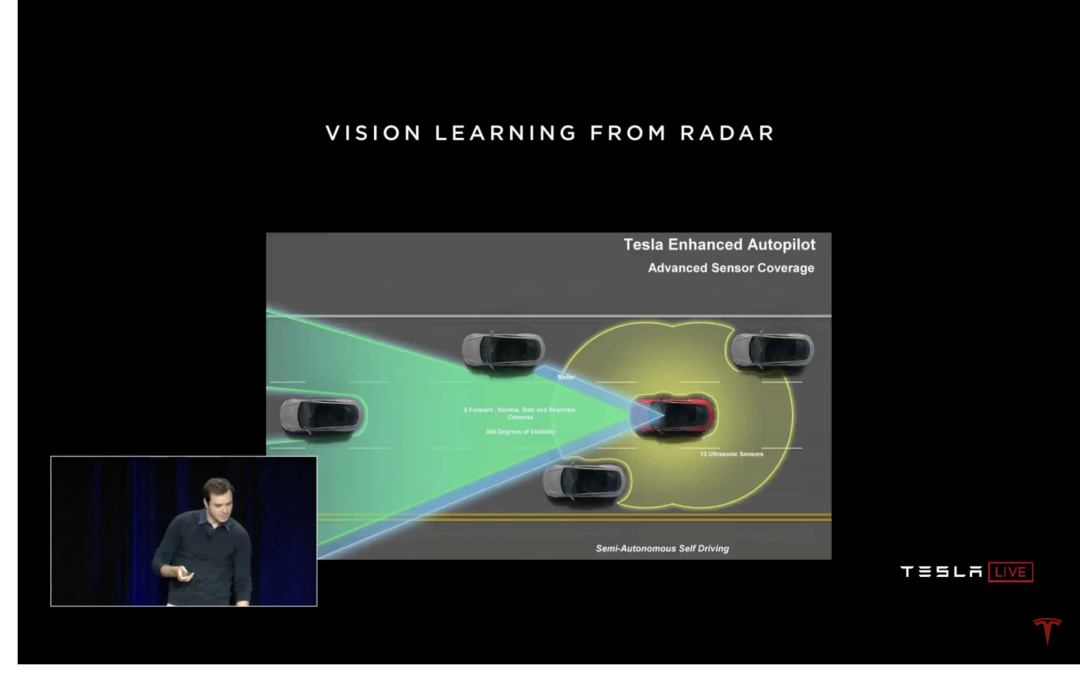
Karpathy在演示中强调,特斯拉将坚定不移地将计算机视觉技术作为自动驾驶的核心,并且将自研的超级计算机用于神经网络的研究中去。
Karpathy列举了「肉脑」的几大罪证:反应慢(250ms);需要转头和看后视镜来判断环境;不好好开车,喜欢玩儿手机。
紧接着就表示,「硅」脑不仅反应快,而且开车全神贯注,不会时不时地就去刷Ins。
以特斯拉的风格,但凡讲到自动驾驶,就一定要怼一下那个又贵又不好用的Lidar。
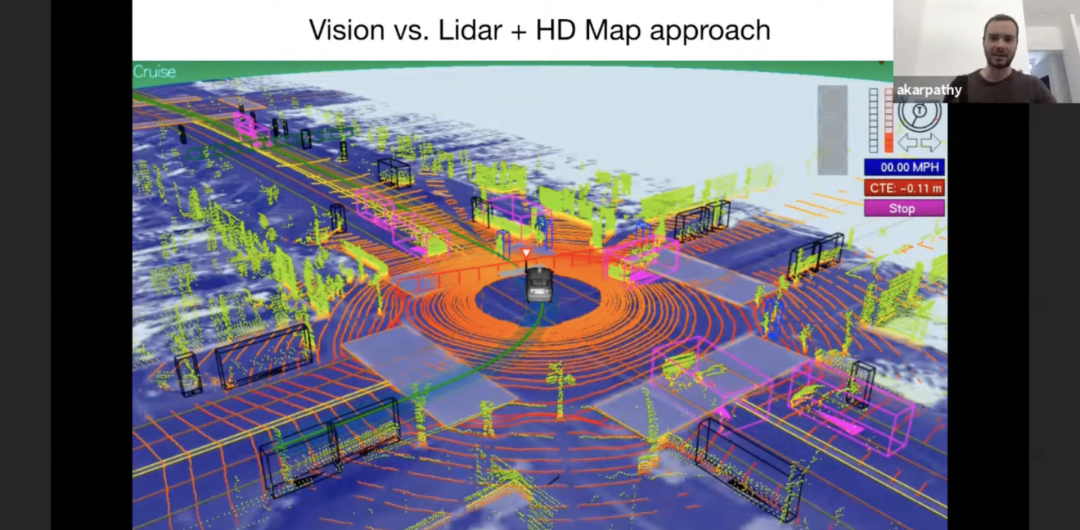

毕竟马斯克说了,我们只用纯视觉。
Karpathy 分享了特斯拉超级计算机如何利用计算机视觉来纠正驾驶员不良行为的一些场景,包括紧急制动、交通参与者监测以及红绿灯识别等等。
另外在演示中,Karpathy还展示了被称为踏板误用纠正的功能:当车辆检测到前方有行人或者道路变窄的情况时,当驾驶员把油门当做刹车踩下,车辆则不会加速。
这项功能推出后不知道那些关于特斯拉失控的报道会不会有所减少。


Dojo:给AI打造的「练功房」


参考资料:
https://electrek.co/2021/06/21/tesla-unveils-new-supercomputer-train-self-driving-ai/
如果觉得有用,就请分享到朋友圈吧!
公众号后台回复“目标检测竞赛”获取目标检测竞赛经验资源~

# CV技术社群邀请函 #
备注:姓名-学校/公司-研究方向-城市(如:小极-北大-目标检测-深圳)
即可申请加入极市目标检测/图像分割/工业检测/人脸/医学影像/3D/SLAM/自动驾驶/超分辨率/姿态估计/ReID/GAN/图像增强/OCR/视频理解等技术交流群
每月大咖直播分享、真实项目需求对接、求职内推、算法竞赛、干货资讯汇总、与 10000+来自港科大、北大、清华、中科院、CMU、腾讯、百度等名校名企视觉开发者互动交流~