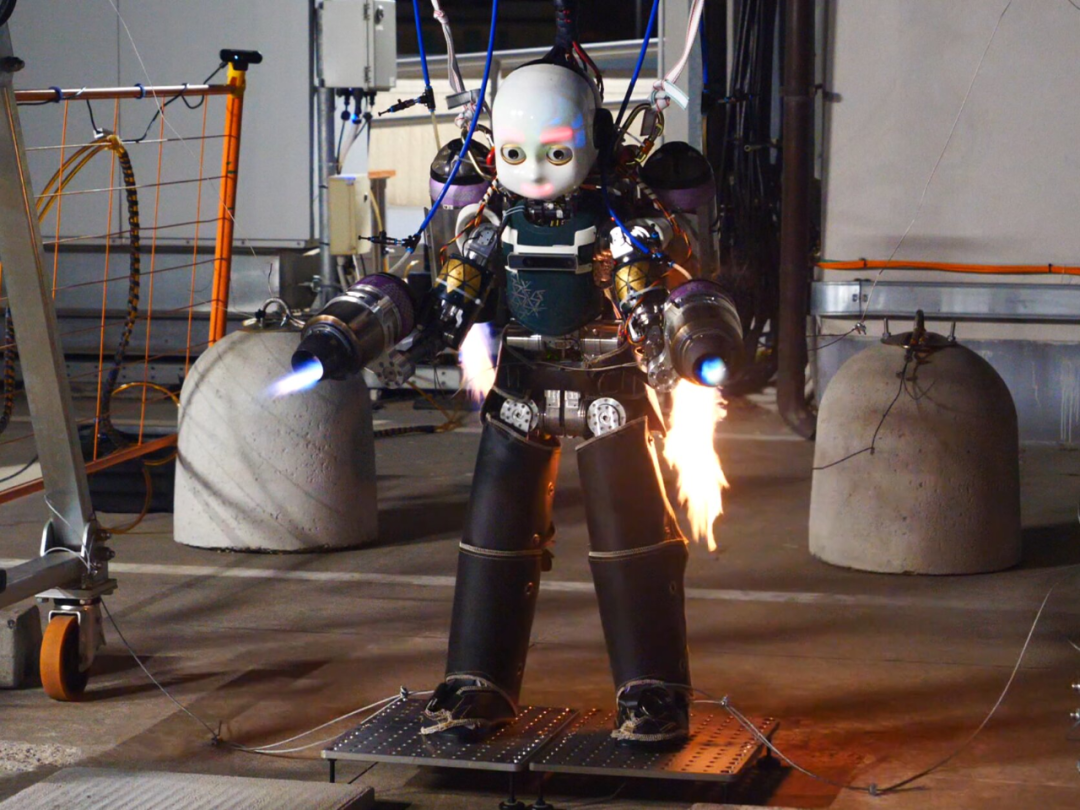
造了一个,低配版「钢铁侠」?Jack Cui关注共 2749字,需浏览 6分钟 ·2022-01-06 17:56 转自:机器之心 | 蛋酱「看,那个大眼睛机器人好像钢铁侠啊!」一直以来,钢铁侠托尼 · 史塔克(Iron Man)深受全球漫威影迷的喜爱,一身高科技「铁衣」,御空飞行,着实令人羡慕。现实世界中,很多人都希望拥有钢铁侠的飞行能力,做过的尝试也不少。今年 5 月份,英国海军研发的一款载人喷气式飞行背包引发热议,该背包的飞行速度可达 136 公里 / 时,虽然飞行高度不高,但多多少少有了钢铁侠的影子。https://www.youtube.com/watch?v=NSeDy74pDNE来自意大利理工学院的一支研究团队致力于制造能够实现飞行的类人机器人。他们发现,为了高效地控制飞行机器人、飞行物体或车辆的运动,需要构建一个能够对推进器产生的推力强度进行可靠估计的系统,这样才可以在实现空中飞行。由于推力难以直接测量,因此通常基于机载传感器收集的数据进行估计。IIT 的团队最近推出了一个新框架,可以估计未配备推力测量传感器的飞行多体系统的推力强度。该框架发表在 IEEE Robotics and Automation Letters 上的一篇论文中,最终可以帮助他们实现他们设想的飞行类人机器人。「我们制作飞行类人机器人的早期想法出现在 2016 年左右,」进行这项研究的人工智能和机械智能实验室负责人 Daniele Pucci 告诉 TechXplore。「主要目的是设想可以在类似灾难的情况下运行的机器人,在这种情况下,幸存者可以在部分毁坏的建筑物内进行救援,而这些建筑物由于周围可能发生洪水和火灾而难以到达。」论文地址:https://ieeexplore.ieee.org/abstract/document/9622189Pucci 和同事的主要目标是设计一个可以操纵物体、在地面上行走和飞行的机器人。鉴于许多人形机器人既可以操纵物体又可以在地面上移动,因此该团队决定扩展人形机器人的功能,使其增加飞行的能力,而不是开发全新的机器人结构。「一旦具备飞行能力,人形机器人就可以从一座建筑物飞到另一座建筑物,躲避碎片、火灾和洪水,」Pucci 说。「着陆后,它们可以操纵物体打开门和关闭气阀,或进入建筑物进行室内检查,例如寻找火灾或自然灾害的幸存者。」Pucci 和他的同事尝试为 IIT 打造的著名人形机器人 iCub 提供在地面上保持身体平衡的能力,例如单脚站立。做到了这一点之后,他们开始致力于拓宽机器人的运动技能,使其可以在空中飞行和移动。团队将他们一直关注的研究领域称为「空中人形机器人」。「据我们所知,我们完成了第一部关于飞行类人机器人的研究,」Pucci 说道,「这篇论文显然只是在模拟环境中测试飞行控制器,但是抱着期望,我们开始了设计 iRonCub 的旅程,这是我们最新这篇论文中介绍的第一个喷气式人形机器人。」研究者提出的推力估算框架极大地简化了飞行机器人的设计,并降低了制造成本。该框架没有使用力传感器数据来估计推力,而是将两种不同的信息源组合成一个单一的估计过程。因此,研究者不需要在推动机器人的每个喷气发动机上安装力传感器。该框架使用的第一个信息来源是一个模型,模型将发送给喷气发动机的命令与产生的推力联系起来。这是一个数据驱动的模型,是根据研究人员收集的数据进行训练的。Pucci 说: 「我们首先建造了一个特别的实验装置,它看起来像一个防火、防弹的房间,用来放置喷气发动机和安全地进行实验。」「然后,通过使用这种设置,我们从喷气发动机收集输入 / 输出数据,并选择描述发动机行为的模型。这些建立在我们以前的工作之上。」框架用来估计推力的第二个信息来源是整个机器人所谓的「质心动量」。这是一个机器人的人形系统开发的著名定理,以控制和估计它们的运动。「如果使用得当,例如,这个定理可以描述跳水运动员从悬崖上跳下的动作,」Pucci 说。换句话说,它可以用来联系起飞前后机器人运动的原因 (即推力) 和影响(如起飞的垂直加速度)。如果单独使用,框架的两个信息源都会有很大的局限性。例如,使用数据驱动模型的话,只有在喷气发动机始终以完全相同的方式工作时,才能准确地估计推力。然而,喷气式发动机会根据不同的环境因素表现不同。「第二种方法不使用内部喷气信息,」Pucci 说。「因此,我们使用卡尔曼滤波结合这两种方法,克服各自的缺点。值得注意的是,我们的估计方法独立于飞行类人机器人的特殊性质,可用于为任何飞行多体机器人设计的飞行控制器。」为了评估框架的有效性,Pucci 和他的同事们在一个名为 iRonCub 的新型机器人上进行了测试,这是 iCub 机器人与集成喷气发动机的进化版。虽然团队已经在这个机器人上投入工作了一段时间,但是直到最近才能够展示它的全部功能。Pucci 解释说: 「操作喷气动力机器人不是一件容易的事情,因为喷气温度可能达到 700 摄氏度,而且空气速度可能具有超音速特征,流速约为 1800 公里 / 小时。」「出于这个原因,我们开发了严格的实验程序和协议,使我们能够安全地与 iRonCub 一起工作。研究团队必须克服一些问题,这些问题与传统的机器人研究相去甚远,与航空电子设备也相去甚远。」虽然研究人员目前只测试了他们的仿人机器人 iRonCub 的推力估算框架,但它也可以应用于其他具有不同身体结构的飞行机器人。这包括可重新配置的飞行机器人,这些系统可以改变形状或配置来执行特定的动作。Pucci 说: 「无论如何,推力的估计问题是成功飞行的关键。」。「除了在类似灾难的情况下的应用,我们相信这项工作可以应用于比飞行类人机器人更简单的设计,包括喷气动力的飞行箱。」如果应用于喷气式飞行箱,研究人员开发的推力估算框架可以为偏远地区运送各种产品开辟新的机会,包括食品和药品。如果得到欧盟或者科学基金会的资助,Pucci 和他的同事们希望能够更深入地探索这一可能的应用。与此同时,团队计划继续开发 iRonCub,专注于它的飞行能力。他们希望最终能够制造出第一个可靠且性能优良的人形机器人,且能够同时进行陆地和空中运动。英文原文:https://techxplore.com/news/2021-12-humanoid-robot.html·················END·················推荐阅读• 领证啦!• 又整新活,AI 杀麻了!• 清华这样上! 浏览 38点赞 评论 收藏 分享 手机扫一扫分享分享 举报 评论图片表情视频评价全部评论推荐 羊了个羊,但是低配版程序员鱼皮0索尼又造了一个bar放毒0耗时4个月,稚晖君硬生生造了一只钢铁侠的机械臂!芯片之家0HikariCP为什么自己造了一个FastList?公众号程序猿DD0厌倦职场,年轻人逃向“低配版”财富自由蓝鲸浑水0“低代码”扑街了?C语言题库0割韭菜?「钢铁侠」马斯克3天抛售450万股,顺了民意新智元0低配版数据科学家?2020年10大高薪数据分析职位Python涨薪研究所0钢铁侠马斯克,当上了美国院士肉眼品世界0我们造了个硬核低代码轮子,在 EHR 领域称王点击上方 前端瓶子君,关注公众号回复算法,加入前端编程面试算法每日一题群目前,我们打造了一个通用性,而非业务指向性,但是又非常适合EHR的【飞轮】低代码平台,并已顺利服务于线上环境。借此上线的时机,在这跟...点赞 评论 收藏 分享 手机扫一扫分享分享 举报




 下载APP
下载APP