
基于结构光测量技术和3D物体识别技术开发的机器人3D视觉引导系统
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达
本文转自|新机器视觉

基于结构光测量技术和3D物体识别技术开发的机器人3D视觉引导系统,可对较大测量深度范围内散乱堆放的零件进行全自由的定位和拾取。相比传统的2D视觉定位方式只能对固定深度零件进行识别且只能获取零件的部分自由度的位置信息,具有更高的应用柔性和更大的检测范围。可为机床上下料、零件分拣、码垛堆叠等工业问题提供有效的自动化解决方案。

机器视觉3D引导系统框架

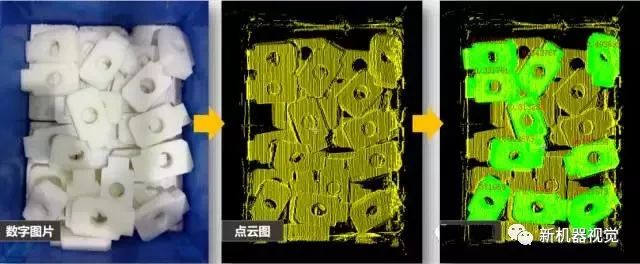
3D重建和识别技术
通过自主开发的3D扫描仪可获准确并且快速地获取场景的点云图像,通过3D识别算法,可实现在对点云图中的多种目标物体进行识别和位姿估计。
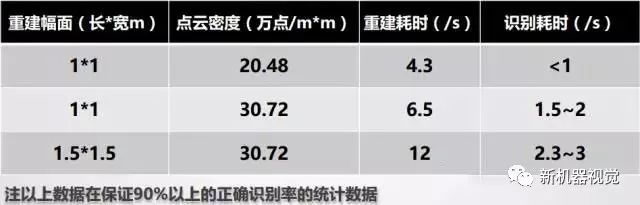
3D重建和识别效率
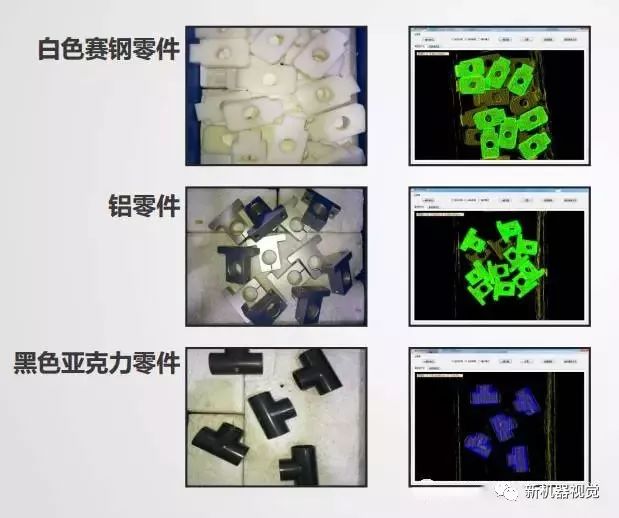
多种材质识别效果测试
得益于健壮的重建算法和识别算法,可对不同材质的零件进行稳定的重建和识别,即便是反光比较严重的铝材料及黑色零件都能获得较好的重建和识别效果,可适用于广泛的工业场景。
机器人路径规划
并不是获得零件的位姿信息后就能马上进行零件的拾取,这仅仅只是第一步,要成功拾取零件还需要完成以下几件事:
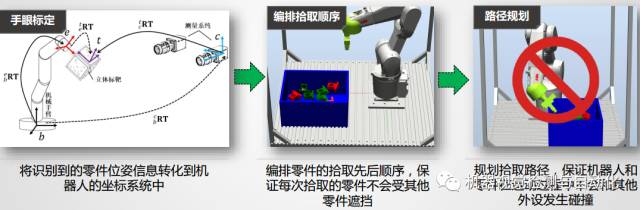
自主开发的机器人轨迹规划算法,可轻松完成上述工作,保证机器人拾取零件过程稳定可靠。
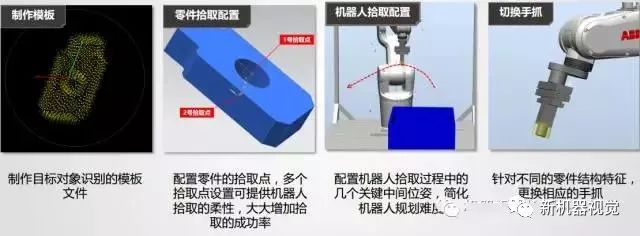
快速切换拾取对象
只需要四个简单的操作即可实现拾取对象的快速切换,无需进行复杂的工装、产线的调整。
视频
来源:机器视觉检测与自动化中心
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
评论